Автор: Денис Аветисян
Новая нейрографическая модель позволяет роботам реконструировать трехмерные сцены и планировать захват объектов, используя всего одно изображение RGBD, без предварительного обучения на 3D-данных.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"Дифференцируемая обратная графика обеспечивает беспрецедентную эффективность и интерпретируемость в задачах роботизированного восприятия.
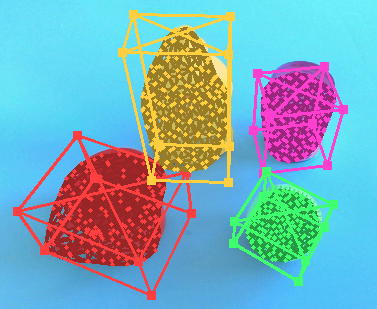
Ограниченность существующих робототехнических систем в адаптации к новым условиям обусловлена необходимостью в больших объемах данных для обучения и распознавания объектов. В данной работе, посвященной ‘Differentiable Inverse Graphics for Zero-shot Scene Reconstruction and Robot Grasping’, представлена дифференцируемая нейрографическая модель, способная к реконструкции сцены и захвату объектов без использования каких-либо 3D-данных или тестовых примеров. Предложенный подход решает серию оптимизационных задач для оценки физически согласованных параметров сцены, таких как сетки, освещение и положение объектов, на основе единственного RGBD-изображения и ограничивающих рамок. Может ли подобный метод стать основой для создания более гибких и обобщаемых систем робототехники, способных эффективно функционировать в неизвестных средах?
Преодолевая Ограничения Традиционного Робототехнического Восприятия
Традиционные системы восприятия у роботов, как правило, требуют обширных наборов данных для обучения распознаванию каждого нового объекта, что существенно ограничивает их адаптивность и способность к обобщению. Вместо того, чтобы понимать общие принципы формы и функции, эти системы запоминают конкретные примеры, что делает невозможным успешное взаимодействие с ранее невиданными предметами. Такая зависимость от больших объемов размеченных данных не только затрудняет масштабирование робототехнических систем, но и препятствует развитию “нулевого обучения” — способности робота к взаимодействию с новыми объектами без предварительной тренировки. В результате, роботы, обученные на ограниченном наборе данных, часто терпят неудачу в реальных, неструктурированных условиях, где разнообразие объектов и ситуаций значительно превышает возможности заранее заданных моделей.
Существующие методы роботизированного восприятия сталкиваются с серьезными трудностями при работе со сложными реальными сценариями. Загроможденность окружения, частичная видимость объектов из-за перекрытий и появление совершенно новых, ранее невиданных предметов значительно снижают надежность захвата. Это связано с тем, что большинство алгоритмов полагаются на четкое разделение объектов и достаточное количество визуальной информации, что редко встречается в неструктурированной среде. Таким образом, робот может ошибочно идентифицировать предмет или неправильно оценить его положение, что приводит к неудачной попытке захвата и требует разработки более устойчивых и адаптивных систем восприятия.
Для функционирования роботов в реальных, динамично меняющихся условиях, крайне важна способность распознавать и взаимодействовать с объектами, которые не встречались в процессе обучения. В отличие от контролируемых лабораторных сред, неструктурированные окружения, такие как дома или улицы, постоянно представляют новые предметы и ситуации. Роботы, способные к обобщению знаний и адаптации к незнакомым объектам, демонстрируют значительно большую гибкость и автономность, что позволяет им решать широкий спектр задач без необходимости постоянной перенастройки или программирования на каждый новый предмет. Такая способность к «нулевому обучению» — взаимодействию с ранее невиданными объектами — является ключевым шагом к созданию действительно универсальных и полезных робототехнических систем, способных к полноценному функционированию в сложных и непредсказуемых условиях.

Восстановление 3D-Сцены из 2D-Изображений: Новый Подход
Представлен новый метод Zero-Shot Reconstruction, использующий физически корректный дифференцируемый рендерер для восстановления трехмерной геометрии сцены по двумерным изображениям. Данный подход позволяет осуществлять сквозную оптимизацию параметров 3D-сцены непосредственно на основе наблюдаемых изображений, минуя этап промежуточных представлений. Использование дифференцируемого рендерера позволяет вычислять градиенты потерь непосредственно по параметрам геометрии, что необходимо для обучения модели на основе 2D-данных и последующего восстановления 3D-структуры сцены без предварительного обучения на 3D-данных.
Используемый нами рендерер, реализованный на основе трассировщика лучей JAX, обеспечивает сквозную оптимизацию параметров 3D-сцены непосредственно из наблюдений 2D-изображений. Это достигается за счет возможности вычисления градиентов непосредственно от выходных пикселей изображения к параметрам геометрии и материалов сцены. В отличие от традиционных методов, требующих промежуточных этапов или ручной настройки, данный подход позволяет оптимизировать все параметры сцены совместно, используя стандартные алгоритмы градиентного спуска. Реализация на JAX обеспечивает высокую производительность и возможность автоматического дифференцирования, что критически важно для эффективной оптимизации сложных 3D-сцен.
Ключевым элементом предложенного метода является функция мягкой маски (Soft-Mask Function), предназначенная для решения проблемы отсутствия градиента при рендеринге бинарных масок. Традиционное использование бинарных масок в процессе рендеринга приводит к нулевому градиенту, что препятствует эффективной оптимизации параметров 3D-сцены. Функция мягкой маски заменяет резкое разделение на «видимый» и «невидимый» пиксели плавным переходом, что позволяет градиенту распространяться через маску и обеспечивать корректную оптимизацию. Это достигается путем использования сигмоидальной функции или аналогичного механизма, определяющего степень прозрачности пикселя на основе его принадлежности к маске. В результате, оптимизация становится возможной даже для объектов, скрытых или частично скрытых в исходных изображениях.
Валидация и Надежность на Сложных Наборах Данных
Метод был протестирован на наборах данных CLVR, FewSOL, MOPED и LINEMOD-OCCLUDED, что позволило оценить его эффективность в сложных сценариях. Набор CLVR представляет собой синтетические сцены с изменяющимися условиями освещения и текстур, FewSOL — задачи с ограниченным количеством примеров для обучения, MOPED — данные, включающие сложные многообъектные сцены, а LINEMOD-OCCLUDED — набор с частично перекрытыми объектами. Тестирование на этих разнообразных наборах данных позволило продемонстрировать устойчивость и обобщающую способность предложенного подхода в условиях, имитирующих реальные проблемы восприятия 3D-сцен.
Для количественной оценки качества реконструированных 3D-сцен используются метрики Chamfer Distance и Hausdorff Distance. Chamfer Distance рассчитывает среднее расстояние от каждой точки в реконструированной сцене до ближайшей точки в эталонной сцене, обеспечивая оценку полноты и точности реконструкции. Hausdorff Distance, в свою очередь, определяет максимальное расстояние между точками в двух наборах данных, что позволяет оценить наихудший случай расхождения между реконструированной и эталонной сценами. Комбинированное использование этих метрик позволяет получить всестороннюю оценку качества 3D-реконструкции, учитывая как общую точность, так и локальные отклонения.
Результаты экспериментов демонстрируют превосходство разработанного подхода над базовыми методами, особенно в условиях зашумленных и частично перекрытых объектов. На бенчмарке CLEVR был достигнут показатель ARVSD в 0.656 ± 0.05, а на датасете LINEMOD-OCCLUDED — 0.275 ± 0.083. Несмотря на то, что подход не требовал предварительного обучения на данных конкретного набора (zero-shot), он вошел в топ-100 участников соревнований BOP Challenge, что подтверждает его высокую эффективность и обобщающую способность.

К Адаптивному Захвату в Реальных Условиях: Открывая Новые Горизонты
Разработанный подход открывает новые возможности для роботизированной манипуляции, позволяя роботам захватывать ранее неизвестные объекты без необходимости предварительного обучения или использования трехмерных моделей. Вместо этого, система способна реконструировать геометрию объекта «с нуля», непосредственно из визуальных данных, что существенно расширяет сферу применения роботов в неструктурированных средах. Это означает, что робот может успешно захватить предмет, с которым он никогда ранее не сталкивался, просто «увидев» его, что является значительным шагом к созданию действительно адаптивных и автономных роботизированных систем. Такая способность к «нулевому» обучению делает технологию особенно перспективной для применения в логистике, складском хозяйстве и других областях, где разнообразие объектов постоянно меняется.
Для реализации адаптивного захвата в реальных условиях была успешно интегрирована разработанная система реконструкции с роботом-манипулятором UR5 и роботизированной рукой Mia Hand. В качестве основного источника визуальной информации использовалась камера RealSense D405, обеспечивающая получение данных о глубине и цвете. Эта интеграция позволила создать полностью автономную систему, способную воспринимать окружающую среду и планировать захваты объектов без предварительного обучения или использования трехмерных моделей. Данное сочетание аппаратных и программных средств открывает новые возможности для роботизированных систем, работающих в неструктурированных и динамичных средах, где требуется высокая гибкость и адаптивность.
Исследования, проведенные с использованием набора данных YCB, продемонстрировали впечатляющую способность роботизированной системы к надежному захвату ранее невиданных объектов в реалистичных условиях. В ходе экспериментов, включающих широкий спектр форм и размеров, система достигла общего процента успешных захватов в 89.28%. Этот результат свидетельствует о значительном прогрессе в области адаптивного захвата, позволяя роботам эффективно взаимодействовать с окружающим миром без необходимости предварительного обучения или использования 3D-моделей. Достигнутая точность и надежность открывают перспективы для широкого применения в различных областях, включая автоматизацию производства, логистику и обслуживание.

Исследование демонстрирует, что элегантность и эффективность роботизированного восприятия напрямую зависят от ясности и простоты базовой модели. Авторы предлагают дифференцируемую нейрографическую модель, способную к реконструкции сцен и захвату объектов без необходимости в обширных наборах 3D-данных для обучения. Это подчеркивает важность понимания целостной системы, а не только отдельных её частей. Как однажды заметил Анри Пуанкаре: «Наука не состоит из ряда случайных открытий, а из связного целого, в котором каждая новая идея является логическим следствием предыдущей». Данный подход, позволяющий роботу ориентироваться в новой среде, является ярким примером того, как структура определяет поведение системы, и подтверждает, что простота — это не минимализм, а чёткое различение необходимого и случайного.
Куда же дальше?
Представленная работа, безусловно, демонстрирует изящество подхода к проблеме реконструкции сцен и захвата объектов. Однако, как всегда бывает, элегантность решения лишь подчеркивает сложность самой задачи. Система, способная к обобщению без необходимости обширных тренировочных данных, — это шаг вперед, но не следует забывать: любая модель — это упрощение реальности. Границы ответственности здесь размыты, и, если не предвидеть, где именно система может дать сбой, последствия могут быть болезненными.
Ключевым вопросом остается устойчивость к шуму и неполноте данных. Идеальный RGBD-снимок — редкость. Как модель поведет себя в условиях плохой освещенности, частичной видимости или неточностей сенсоров? Необходимо исследовать возможности повышения робастности, возможно, за счет интеграции с другими сенсорными модальностями или использованием методов активного сбора данных. Простота модели — это благо, но иногда для решения сложной задачи требуется добавить немного «грязи» — учитывать неидеальность мира.
В перспективе, стоит задуматься о расширении области применения. Реконструкция и захват объектов — лишь один из возможных сценариев. Может ли подобный подход быть адаптирован для решения более общих задач компьютерного зрения, например, для семантической сегментации или обнаружения аномалий? В конечном итоге, истинный успех — не в создании красивой модели, а в её способности решать реальные проблемы, даже если это означает признание её собственных ограничений.
Оригинал статьи: https://arxiv.org/pdf/2602.05029.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Рынок в ожидании ставки: что ждет рубль, нефть и акции? (20.03.2026 01:32)
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- СПБ Биржа: «Газпром» в фаворе, «Т-техно» под давлением, дефицит юаней тревожит инвесторов (22.03.2026 22:33)
- Макросъемка
- Космос в деталях: Навигация по астрономическим данным на иммерсивных дисплеях
- Искусственные мозговые сигналы: новый горизонт интерфейсов «мозг-компьютер»
- Как научиться фотографировать. Инструкция для начинающих.
- От фотографий к фильмам: полное руководство по переходу на видеосъемку
- Три простых изменения в светлой комнате, чтобы создать свой объект съемки.
- Российский рынок: между ростом потребления газа, неопределенностью ФРС и лидерством «РусГидро» (24.12.2025 02:32)
2026-02-07 15:22