Автор: Денис Аветисян
Новая система VIGOR позволяет роботам-гуманоидам восстанавливаться после падений и сохранять устойчивость на различных поверхностях благодаря машинному зрению и обучению с подкреплением.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
Представлена унифицированная система VIGOR, использующая визуальную информацию и факторизованный подход к обучению для обеспечения безопасности гуманоидных роботов при падениях и адаптации к пересеченной местности.
Несмотря на значительные успехи в робототехнике, надежное восстановление после падений остается сложной задачей для гуманоидных роботов. В данной работе, представленной под названием ‘VIGOR: Visual Goal-In-Context Inference for Unified Humanoid Fall Safety’, предлагается унифицированный подход к обеспечению безопасности при падениях, основанный на визуальном восприятии и факторизованном обучении. Ключевой идеей является использование латентного представления целевого состояния в контексте окружающей местности, позволяющего роботу быстро адаптироваться к различным типам рельефа. Сможет ли данная методика обеспечить гуманоидным роботам стабильную работу в реальных, непредсказуемых условиях, открывая новые возможности для их применения?
Неизбежность Падений: Проблема Динамической Устойчивости
Для человекоподобных роботов надежное восстановление после потери равновесия является критически важной задачей, однако традиционные методы управления часто оказываются неэффективными при непредсказуемых изменениях точек контакта с окружающей средой. Проблема заключается в том, что стандартные алгоритмы, основанные на заранее запрограммированных реакциях, не способны оперативно адаптироваться к внезапным нарушениям устойчивости и динамически меняющимся условиям опоры. В моменты, когда робот теряет равновесие, характер и последовательность контактов с поверхностью становятся хаотичными, что приводит к быстрому отклонению от запланированной траектории и, как следствие, к падению. Поэтому разработка систем управления, способных мгновенно реагировать на подобные ситуации и корректировать движения робота в режиме реального времени, остается сложной, но необходимой задачей для создания по-настоящему устойчивых и автономных человекоподобных машин.
Поддержание равновесия при внешних возмущениях требует от гуманоидных роботов способности к быстрой адаптации к изменяющимся условиям, что значительно превосходит возможности заранее запрограммированных реакций. Традиционные подходы, основанные на жестких алгоритмах, часто оказываются неэффективными, поскольку не способны оперативно учитывать непредсказуемые факторы, такие как неровности поверхности или внезапные толчки. Исследования показывают, что для успешного восстановления равновесия необходима система, способная в реальном времени анализировать сенсорные данные, прогнозировать траекторию падения и мгновенно корректировать движения, используя весь доступный арсенал моторики. Такая адаптивность требует перехода от реактивных стратегий к проактивным, где робот не просто реагирует на возмущения, а предвидит их и заранее предпринимает меры для сохранения устойчивости.
Современные системы управления человекоподобными роботами зачастую испытывают трудности с эффективным использованием визуальной информации в динамичных ситуациях, что существенно ограничивает возможности проактивного восстановления равновесия. Анализ изображений с камер, хотя и предоставляет ценные данные об окружающей среде и положении робота, редко интегрируется в систему управления таким образом, чтобы предвидеть потенциальные нарушения стабильности до их возникновения. Это приводит к тому, что реакция на возмущения происходит уже после начала падения, когда требуется значительное усилие для восстановления устойчивого положения. Исследования показывают, что способность оперативно интерпретировать визуальные данные о скорости, направлении и характере движения, а также о свойствах поверхности, по которой перемещается робот, является ключевым фактором для достижения действительно эффективного и предвосхищающего восстановления равновесия, что пока остается сложной задачей для большинства существующих систем.
Для достижения истинной динамической устойчивости необходимо разработать систему, способную предвидеть и нейтрализовать начало падения до того, как оно станет неуправляемым. Такая система не просто реагирует на возмущения, но и анализирует текущую ситуацию, прогнозируя возможные отклонения от равновесия. В ее основе лежит непрерывный процесс оценки состояния, включающий анализ визуальной информации и данных от сенсоров, позволяющий идентифицировать критические моменты и заранее корректировать траекторию движения. Реализация подобного подхода требует интеграции алгоритмов машинного обучения и адаптивного управления, способных оперативно реагировать на изменяющиеся условия и обеспечивать превентивное восстановление равновесия, что принципиально отличает его от традиционных реактивных методов контроля.
VIGOR: Управляемое Зрение для Восстановления
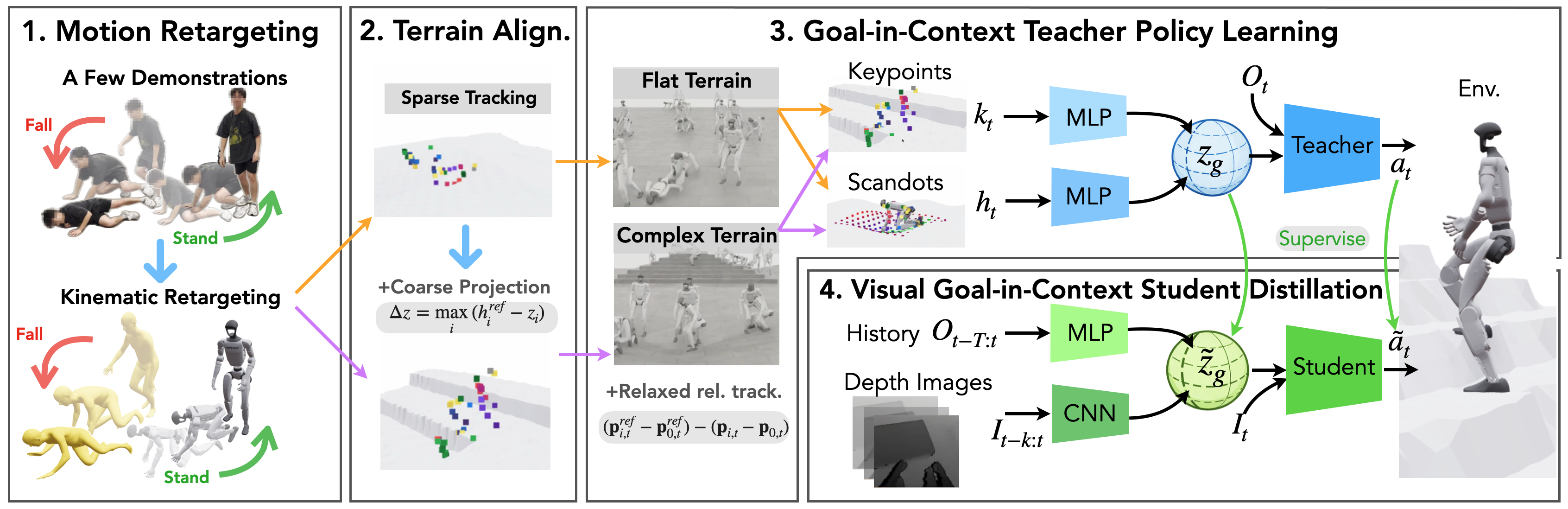
В основе системы VIGOR лежит использование “привилегированной” политики обучения, которая тренируется с доступом к информации о рельефе местности. Данный подход позволяет политике разрабатывать надежные стратегии восстановления после падений, учитывая особенности ландшафта. В процессе обучения политика получает полную информацию о геометрии окружающего пространства, что значительно упрощает задачу освоения устойчивых стратегий восстановления, в отличие от обучения “вслепую”, когда агент вынужден действовать без предварительной информации о местности. Использование привилегированной политики позволяет существенно повысить надежность и эффективность системы VIGOR в различных условиях, обеспечивая стабильное восстановление после падений даже на сложной и неровной поверхности.
Обучение стратегий восстановления после падений в VIGOR осуществляется посредством использования политики “учителя”, оптимизируемой с применением алгоритма обучения с подкреплением Proximal Policy Optimization (PPO). PPO позволяет политике “учителя” адаптироваться к различным возмущениям и типам местности, максимизируя вероятность успешного восстановления равновесия. В процессе обучения PPO итеративно улучшает параметры политики, стремясь к достижению наивысшего вознаграждения за стабильное восстановление после падений, учитывая как динамику движения, так и характеристики окружающей среды. Это обеспечивает надежность стратегий восстановления в широком диапазоне условий и при различных внешних воздействиях.
В основе VIGOR лежит использование латентного пространства, учитывающего контекст цели, что позволяет политике рассуждать как о желаемом конечном состоянии, так и об окружающей среде. Это достигается за счет кодирования информации о цели и окружении в векторное представление, которое затем используется для принятия решений о восстановлении после падения. Данное латентное пространство позволяет агенту учитывать взаимосвязь между текущим состоянием, желаемой целью и характеристиками местности, обеспечивая более адаптивные и эффективные стратегии восстановления, чем при использовании подходов, не учитывающих контекст. Фактически, политика получает возможность планировать действия, основываясь не только на немедленной реакции на возмущение, но и на долгосрочном влиянии этих действий на достижение цели в конкретной среде.
В основе эффективности и обобщающей способности VIGOR лежит метод факторизованной сложности данных (Factorized Data Complexity), позволяющий отделить структуру человеческой позы от вариаций рельефа местности. Данный подход заключается в представлении данных о позе и окружающей среде в виде независимых факторов, что снижает размерность пространства состояний и упрощает процесс обучения. Разделение этих факторов позволяет политике фокусироваться на ключевых аспектах восстановления равновесия, не отвлекаясь на несущественные изменения рельефа. Это приводит к более быстрой сходимости обучения и улучшенной способности к обобщению на новые, ранее не встречавшиеся типы местности и возмущения.
От Симуляции к Реальности: Обучение с DAgger
Политика студента обучается с использованием алгоритма DAgger (Dataset Aggregation), итеративного метода контролируемого обучения. DAgger предполагает, что «привилегированный учитель» демонстрирует желаемое поведение, а студент обучается имитировать эти действия. На каждом шаге алгоритма студент генерирует действия, учитель предоставляет оптимальные действия для тех же состояний, и эти данные добавляются в обучающую выборку. Студент переобучается на расширенной выборке, и процесс повторяется до сходимости. Ключевым аспектом является агрегация данных, полученных от учителя, для создания более надежного набора обучающих примеров, что позволяет студенту обобщать поведение учителя и адаптироваться к новым ситуациям.
Политика студента использует данные из egocentric vision (видение от первого лица) и проприоцепции (ощущение положения тела в пространстве) для вывода латентного представления цели в контексте текущей ситуации. Это позволяет агенту динамически адаптироваться к изменяющимся условиям и новым задачам в режиме реального времени, поскольку система способна интерпретировать визуальную информацию и данные о собственном движении для определения текущей цели и планирования соответствующих действий. Такой подход позволяет избежать жесткой предварительной настройки и обеспечивает гибкость в сложных и непредсказуемых средах.
Обучение и оценка алгоритмов проводятся в среде симуляции IsaacGym, обеспечивающей высокую реалистичность физических взаимодействий и эффективную итерацию. IsaacGym использует возможности GPU для ускорения расчетов физики, что позволяет проводить обучение в тысячные доли секунды и значительно сократить время разработки. Симулятор поддерживает широкий спектр физических параметров и моделей, что позволяет создавать сложные и правдоподобные сценарии. Высокая скорость симуляции в сочетании с реалистичной динамикой делает IsaacGym идеальной платформой для разработки и тестирования алгоритмов обучения с подкреплением и других систем, требующих взаимодействия с физическим миром.
Алгоритм VIGOR использует демонстрации, выполненные человеком, для формирования структурных априорных знаний, что значительно ускоряет процесс обучения и повышает качество получаемого поведения. Вместо обучения с нуля, VIGOR инициализирует политику студента, опираясь на данные, полученные от эксперта-человека, что позволяет быстрее сходиться к оптимальному решению и избегать нежелательных траекторий обучения. Это особенно эффективно в задачах, требующих сложных манипуляций или навигации, где ручное проектирование политики может быть трудоемким и неэффективным. Использование демонстраций в качестве априорных знаний обеспечивает более устойчивое и надежное поведение в различных условиях.

Расширение Возможностей и Обобщение: Влияние VIGOR
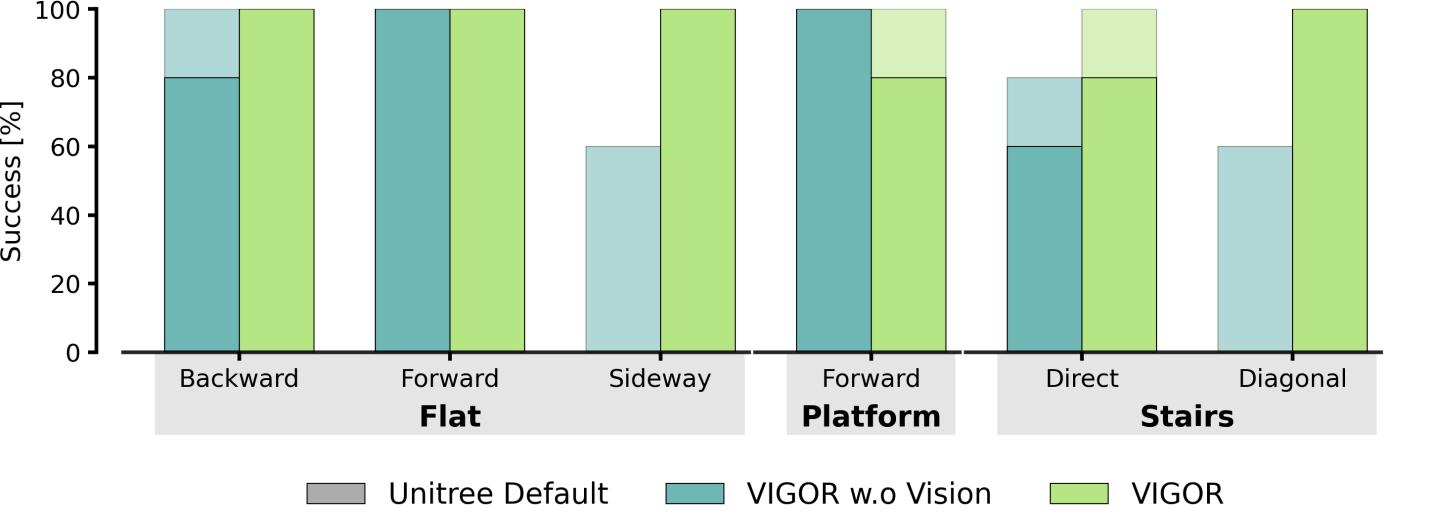
Система VIGOR демонстрирует возможности, выходящие за рамки простого предотвращения падений, обеспечивая проактивное восстановление равновесия и вставание из сложных начальных положений. В отличие от традиционных подходов, фокусирующихся на реактивном контроле после потери устойчивости, VIGOR позволяет роботу предвидеть потенциальные нарушения равновесия и активно корректировать свою позу, предотвращая падение или эффективно восстанавливаясь даже из нестабильных состояний, таких как наклон или частичная потеря опоры. Это достигается за счет использования продвинутых алгоритмов управления, которые позволяют роботу динамически перераспределять вес и координировать движения всего тела, обеспечивая стабильность и способность к самовосстановлению в широком диапазоне сложных сценариев.
Обучение с использованием рандомизации рельефа местности значительно повышает устойчивость и способность к обобщению стратегий управления роботами-гуманоидами в новых, ранее не встречавшихся условиях. В ходе тренировочного процесса, алгоритм намеренно сталкивается с широким спектром неровностей, наклонов и других вариаций поверхности, что заставляет его разрабатывать более универсальные и адаптивные стратегии поддержания равновесия и передвижения. Такой подход позволяет избежать переобучения к конкретному типу местности и гарантирует, что робот сможет успешно функционировать даже в сложных и непредсказуемых средах, эффективно преодолевая препятствия и сохраняя устойчивость. В результате, система демонстрирует повышенную надежность и гибкость, становясь менее чувствительной к изменениям окружающей среды и более способной к самоадаптации.
Разработанная платформа опирается на передовые методы управления всем телом, такие как DeepMimic и AMP, значительно расширяя их возможности. Вместо простого следования заранее заданным траекториям, система позволяет роботу динамически адаптироваться к изменяющимся условиям и сложным задачам. Интегрируя алгоритмы, обеспечивающие плавное и координированное движение всех степеней свободы, платформа создает основу для выполнения широкого спектра манипуляций и перемещений. Такой подход позволяет гуманоидному роботу не просто имитировать движения человека, но и эффективно взаимодействовать с окружающей средой, демонстрируя высокий уровень контроля и устойчивости даже в сложных ситуациях.
Система VIGOR представляет собой инновационный подход к созданию более приспособляемых и устойчивых человекоподобных роботов. Интегрируя данные визуального восприятия, проприоцепцию (ощущение положения тела в пространстве) и моделирование динамики, VIGOR позволяет роботу не просто реагировать на внешние возмущения, но и предвидеть их, адаптируя свою стратегию для сохранения равновесия и продолжения движения. Такое сочетание сенсорной информации и обученных моделей динамики создает замкнутый контур управления, позволяющий роботу эффективно функционировать в сложных и непредсказуемых условиях, приближая его к уровню адаптивности, присущему человеку. Это открывает возможности для применения подобных роботов в широком спектре задач, требующих надежной работы в реальном мире.

Исследование демонстрирует, как сложные системы, вроде человекоподобных роботов, сталкиваются с необходимостью адаптации к непредсказуемым условиям окружающей среды. Попытки создать идеальную систему контроля, способную предусмотреть все возможные сценарии падения, обречены на провал. Как точно подметил Анри Пуанкаре: «Наука не состоит из ряда истин, а из ряда более или менее вероятных мнений». В контексте VIGOR, это означает, что даже самые продвинутые алгоритмы, использующие машинное зрение и обучение с подкреплением, лишь приближаются к решению проблемы устойчивости, но не гарантируют её абсолютное достижение. Продакшен, как всегда, найдёт способ вывести робота из равновесия на неожиданном участке местности, подтверждая, что теория и практика — вещи разные.
Куда Поведёт Дорога?
Представленный фреймворк VIGOR, безусловно, элегантен в своей попытке объединить зрение и обучение для обеспечения устойчивости гуманоидных роботов. Однако, как показывает практика, любое «унифицированное» решение рано или поздно сталкивается с суровой реальностью: разнородностью мира. Территория, конечно, можно смоделировать, но сколько будет стоить моделирование всех возможных территорий? И сколько времени потребуется, чтобы робот не просто «восстановился», а сделал это быстро, когда на него, скажем, падает коробка?
Полагаться только на обучение, даже «факторизованное», наивно. Рано или поздно, проактивная стратегия, основанная на чётких физических моделях и предсказании, окажется эффективнее реактивного восстановления. И не стоит забывать, что визуальная информация — это всего лишь один из каналов. Датчики, способные ощущать изменения центра масс или даже предвидеть скольжение, могут оказаться куда полезнее, чем сложная нейронная сеть, пытающаяся интерпретировать картинку.
В конечном итоге, VIGOR — это ещё один шаг к цели. Но, как известно, каждый шаг порождает новые вопросы. И иногда лучше иметь одного надёжного робота, умеющего ходить по ровной поверхности, чем сотню, пытающихся выжить в хаосе.
Оригинал статьи: https://arxiv.org/pdf/2602.16511.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Нейросети как посредники: этика и границы взаимодействия с разумом
- Oppo Find X9 Ultra ОБЗОР: большой аккумулятор, скоростная зарядка, чёткое изображение
- Неважно, на что вы фотографируете!
- Российская экономика: замедление, дивиденды и ожидания снижения ставки ЦБ (02.04.2026 00:32)
- Российский рынок: Рубль, Нефть и Корпоративные Истории – Что Ждет Инвесторов? (02.04.2026 23:32)
- vivo iQOO Z11 Turbo ОБЗОР: огромный накопитель, отличная камера, много памяти
- Рекомендации нового поколения: объединяя визуальное и текстовое
- Тело как сеть: NFC для носимой электроники нового поколения
- Российский рынок: Резервы тают, инвестиции растут, прибыли падают: что ждет инвесторов? (02.04.2026 16:32)
- Infinix Note 40 Pro+ выставлен на обзор
2026-02-19 22:10