Автор: Денис Аветисян
Новая система HAIC позволяет роботам-гуманоидам ловко манипулировать объектами в условиях ограниченной видимости, предсказывая их движение.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"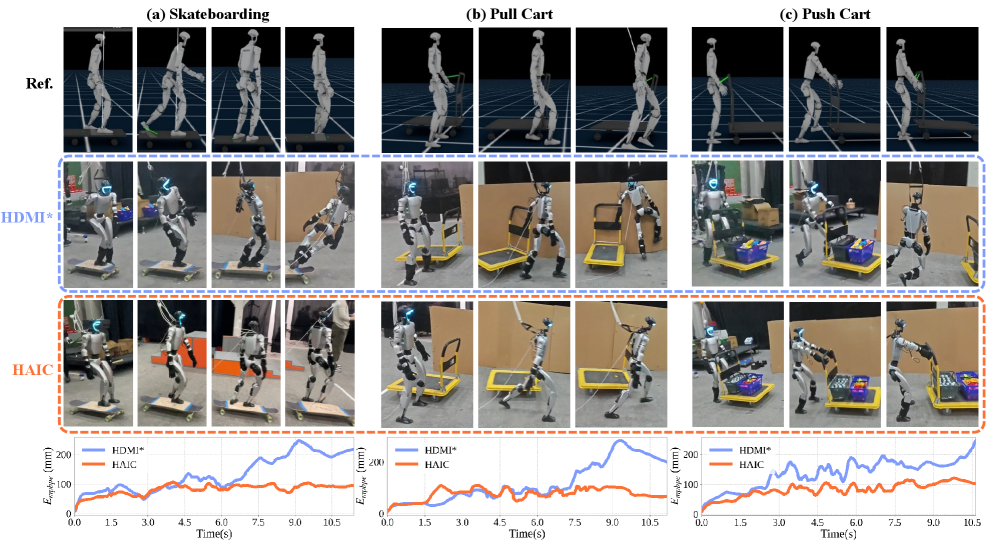
HAIC: Управление гибким взаимодействием гуманоидных роботов с объектами на основе динамической модели мира.
Несмотря на значительный прогресс в области робототехники, надежное взаимодействие гуманоидных роботов с динамическими, слабоуправляемыми объектами в реальных условиях остается сложной задачей. В данной работе, представленной под названием ‘HAIC: Humanoid Agile Object Interaction Control via Dynamics-Aware World Model’, предложен новый подход, основанный на создании динамически осведомленной модели мира, позволяющей прогнозировать состояние объектов и компенсировать инерционные возмущения. Ключевым результатом является разработка системы, способной эффективно взаимодействовать с объектами различной динамики, используя исключительно проприоцептивные данные и предсказанные траектории, что демонстрируется в задачах, таких как скейтбординг и транспортировка грузов. Сможет ли подобный подход обеспечить более адаптивные и надежные системы взаимодействия для широкого спектра гуманоидных роботов в сложных, непредсказуемых средах?
Пророчество Системы: Сложность Взаимодействия
Традиционные методы управления роботами испытывают значительные трудности при выполнении задач, требующих продолжительного взаимодействия всем телом, особенно с объектами, имеющими недостаточную степень управления. Эти объекты, в отличие от полностью управляемых, обладают меньшим количеством степеней свободы и требуют от робота более тонкой адаптации к их динамике. Например, манипулирование гибким кабелем или сборка конструкции из нежестких элементов часто приводит к нестабильности и ошибкам из-за сложности прогнозирования поведения объекта и поддержания необходимого контакта. Роботы, использующие классические подходы, как правило, полагаются на заранее запрограммированные траектории и не способны эффективно реагировать на непредвиденные изменения в окружающей среде или свойствах объекта, что ограничивает их применимость в реальных, неструктурированных условиях.
Ограничения традиционных систем управления роботами при выполнении сложных задач, связанных с взаимодействием с объектами, обусловлены прежде всего неспособностью точно предсказывать динамику этих объектов и адаптироваться к постоянно меняющимся условиям контакта. Неточное прогнозирование траектории движения и сил, возникающих при касании, приводит к нестабильности и ошибкам в управлении. Особенно остро эта проблема проявляется при работе с недостаточно активированными объектами, где даже небольшие погрешности в оценке динамики могут привести к потере контроля. Таким образом, для достижения надежного и эффективного взаимодействия робота с окружающей средой необходима разработка новых алгоритмов, способных учитывать нелинейность и неопределенность динамики объектов, а также оперативно реагировать на изменения в условиях контакта.
Для успешного преодоления сложностей, связанных с взаимодействием роботов с окружением, требуется принципиально новый подход к моделированию и управлению. Традиционные методы зачастую оказываются неэффективными из-за неспособности точно предсказывать динамику объектов и адаптироваться к изменяющимся условиям контакта. Новая парадигма делает акцент на повышении предсказательной точности и устойчивости систем управления, что достигается за счет использования продвинутых алгоритмов машинного обучения и более реалистичных моделей физического взаимодействия. В частности, перспективным направлением является разработка систем, способных не только прогнозировать траекторию движения объекта, но и оценивать вероятность различных сценариев развития событий, позволяя роботу выбирать наиболее оптимальную стратегию действий в условиях неопределенности. Такой подход позволит роботам эффективно выполнять сложные задачи, требующие длительного планирования и точной координации движений, например, сборку сложных механизмов или оказание помощи людям в бытовых ситуациях.
Для достижения точного управления, робототехнические системы нуждаются в детальном понимании собственного состояния, что требует эффективного использования проприоцепции — способности воспринимать положение и движение частей тела. Этот внутренний сенсорный фидбэк позволяет роботу отслеживать углы в суставах, скорости и ускорения, а также силы, действующие на его структуру. Без точной проприоцептивной информации, робот не способен адекватно компенсировать внешние возмущения или неточности в моделировании, что критически важно при взаимодействии со сложными и непредсказуемыми объектами. Развитие усовершенствованных проприоцептивных сенсоров и алгоритмов обработки данных является ключевым фактором для создания более надежных и адаптивных робототехнических систем, способных выполнять сложные задачи манипулирования и взаимодействия с окружающей средой.
HAIC: Разумное Управление Динамикой
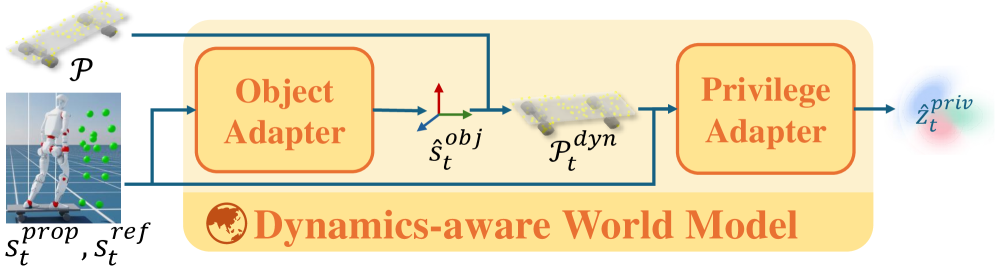
В основе HAIC лежит фреймворк, использующий динамически-ориентированную модель мира для предсказания поведения объектов во время взаимодействия. Эта модель позволяет системе прогнозировать траекторию движения и состояние объектов, учитывая физические законы и характеристики окружающей среды. Использование динамической модели позволяет системе не просто реагировать на текущее состояние объектов, но и предвидеть их будущее поведение, что критически важно для обеспечения стабильного и эффективного управления в сложных сценариях взаимодействия. Прогнозирование поведения объекта основано на оценке его текущего состояния и применении модели динамики, что позволяет системе планировать свои действия с учетом предсказанной траектории объекта.
Мировая модель в HAIC использует адаптер объекта (Object Adapter) для оценки состояния объекта, включающего его положение, скорость и ориентацию. Для обеспечения стабильности и предотвращения нереалистичных прогнозов состояния, к оценке состояния добавляется явная геометрическая проекция (Explicit Geometric Projection). Эта проекция ограничивает предсказанные изменения состояния объекта геометрическими ограничениями среды, таким образом, гарантируя, что предсказанное состояние остается физически реализуемым и предотвращает проникновение объектов сквозь препятствия или самопересечения. Комбинация адаптера объекта и геометрической проекции позволяет модели точно предсказывать поведение объектов во время взаимодействия, что критически важно для надежного управления.
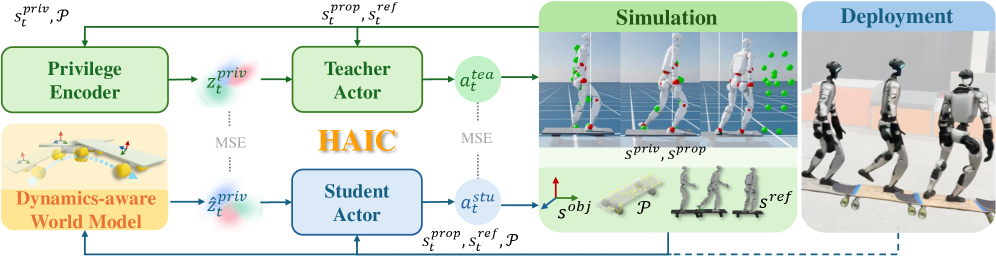
Адаптер привилегий (Privilege Adapter) объединяет предсказанное состояние объекта и геометрические характеристики, формируя критически важную информацию для политики управления. Предсказанное состояние включает в себя данные о положении, скорости и ускорении объекта, полученные от динамической модели мира. Геометрические характеристики, такие как форма, размер и ориентация объекта, предоставляют информацию о его физических свойствах и ограничениях. Объединение этих двух типов данных позволяет политике управления более точно планировать действия и поддерживать стабильное взаимодействие с объектом, учитывая как его текущее состояние, так и физические параметры.
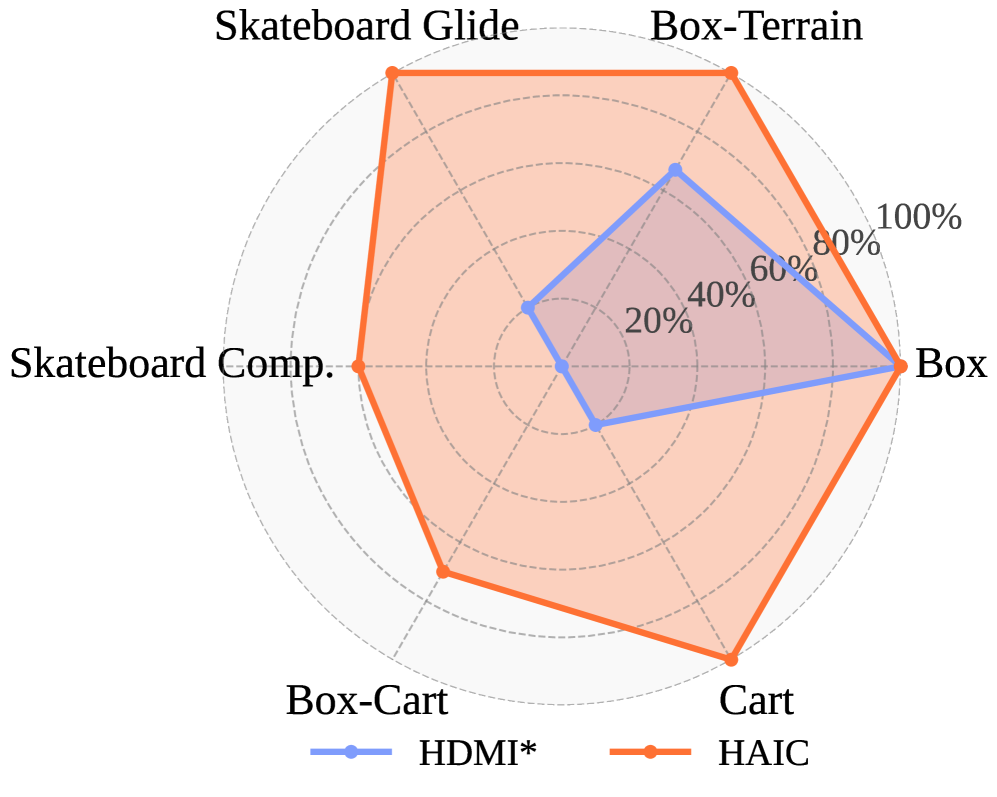
Обучение HAIC осуществляется с использованием алгоритма Proximal Policy Optimization (PPO). Для обеспечения стабильного взаимодействия с объектами и поддержания контакта, в процессе обучения применяется функция вознаграждения (Contact Reward), ориентированная на стабильность контакта. В результате, система демонстрирует 100% успешность в задачах переноски ящиков по различным типам местности в условиях ограниченной видимости (blind multi-terrain box carrying), что подтверждает эффективность предложенного подхода к управлению.
Адаптивное Обучение для Надежности и Обобщения
Асимметричная адаптивная дистилляция непрерывно корректирует модель мира на основе действий обучающей политики (student policy), что приводит к повышению точности предсказаний. Этот процесс предполагает, что модель мира динамически адаптируется к траекториям исследования, генерируемым обучающей политикой, в отличие от статической модели мира. Постоянная адаптация позволяет модели мира лучше прогнозировать будущие состояния, учитывая текущие действия и исследовательское поведение политики, что, в свою очередь, улучшает эффективность обучения и обобщающую способность системы. По сути, дистилляция позволяет передать знания о динамике среды от обучающей политики к модели мира, повышая её прогностическую точность и стабильность.
Обучение системы проводится в симуляционной среде Isaac Gym, что обеспечивает эффективный сбор данных в больших объемах. Isaac Gym использует параллельные вычисления на GPU для ускорения симуляции, позволяя генерировать тысячи различных сценариев обучения одновременно. Это значительно сокращает время, необходимое для обучения сложных политик, по сравнению с обучением в реальном мире или с использованием однопоточных симуляторов. Кроме того, Isaac Gym предоставляет инструменты для автоматической генерации разнообразных сред и объектов, что способствует повышению обобщающей способности обученной модели и её устойчивости к изменениям в окружающей среде.
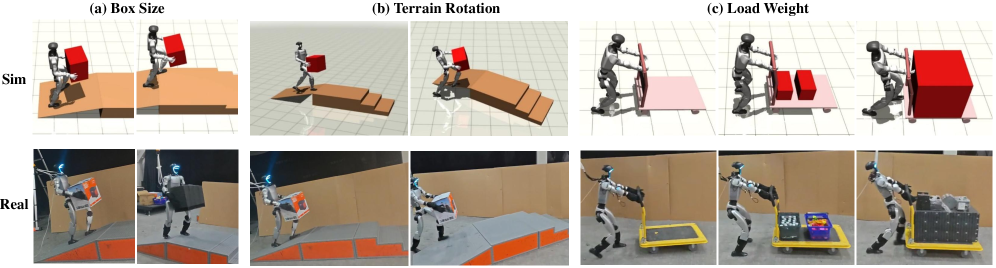
В процессе обучения в среде Isaac Gym применяется доменная рандомизация для повышения устойчивости политики к изменениям параметров окружения и свойств объектов. Этот метод заключается в случайном варьировании различных аспектов симуляции, таких как текстуры, цвета, массы, коэффициенты трения, освещение и геометрия объектов. Посредством обучения на разнообразном наборе симулированных сценариев, политика приобретает способность к обобщению и сохраняет работоспособность при столкновении с незнакомыми или непредсказуемыми условиями в реальном мире. Рандомизация параметров позволяет снизить зависимость от конкретной конфигурации симуляции и повысить надежность системы в различных условиях эксплуатации.
Система проходила тестирование как с полностью управляемыми (fully actuated), так и с частично управляемыми (underactuated) объектами, что демонстрирует её универсальность и способность к адаптации в различных сценариях. В ходе экспериментов в задаче «Push Cart w/ Box» (толкание тележки с коробкой) система достигла минимальной ошибки определения ориентации объекта (Object Orientation Error) по сравнению с существующими подходами, подтверждая эффективность предложенного метода адаптивного обучения для задач манипулирования.
Соединяя Миры: От Симуляции к Реальности
Технология кинематического переноса движений, основанная на оптической регистрации захвата движений, позволяет эффективно передавать данные о человеческих движениях на гуманоидного робота. В процессе работы, система анализирует движения человека, фиксируя положение и ориентацию суставов, а затем преобразует эти данные в команды управления для робота. Этот подход обеспечивает естественное и интуитивно понятное управление роботом, позволяя ему воспроизводить сложные и динамичные движения, характерные для человека. Благодаря точному сопоставлению кинематических параметров, робот способен адаптироваться к различным сценариям взаимодействия, что открывает новые возможности для его применения в различных областях, от помощи в быту до работы в опасных условиях.
Возможность интуитивного управления роботом открывает новые перспективы для взаимодействия человека и машины, позволяя оператору передавать сложные движения и команды естественным образом. Данный подход выходит за рамки традиционного программирования, позволяя исследовать и воспроизводить сценарии, требующие высокой степени адаптивности и координации. Благодаря этому, роботы могут быть обучены выполнению задач в динамично меняющихся условиях, имитируя человеческие навыки и стратегии решения проблем. Исследование сложных сценариев взаимодействия, таких как совместная работа с людьми или навигация в непредсказуемой среде, становится значительно проще и эффективнее, приближая нас к созданию действительно интеллектуальных и универсальных робототехнических систем.
Разработанная система позволила гуманоидному роботу успешно освоить сложные, не полностью управляемые задачи, такие как катание на скейтборде, продемонстрировав передовые результаты в этой области. Робот способен выполнять динамичные движения и адаптироваться к меняющимся условиям, что свидетельствует о значительном прогрессе в области управления роботами. Освоение подобных задач, требующих координации и баланса, подтверждает эффективность предложенного подхода к переносу человеческих движений на роботизированные системы и открывает новые возможности для создания более ловких и универсальных роботов, способных функционировать в реальных условиях.
Разработанная система HAIC демонстрирует впечатляющую скорость обработки информации — всего 0.17 миллисекунд за период вывода, что составляет менее 1% от общего времени управления роботом. Эта минимальная задержка позволяет роботу мгновенно реагировать на изменения окружающей среды и выполнять сложные задачи в реальном времени. Такая высокая производительность открывает перспективы для создания более универсальных и интеллектуальных роботов, способных эффективно функционировать в динамичных и непредсказуемых условиях реального мира, например, в городской среде или при взаимодействии с людьми. Возможность быстрой обработки данных является ключевым фактором для обеспечения безопасности и надежности робототехнических систем, работающих в непосредственной близости от человека.
Представленная работа демонстрирует подход к управлению взаимодействием гуманоидных роботов с объектами, основанный на построении динамически-осведомленной модели мира. Подобный подход позволяет роботу предвидеть поведение объекта, что критически важно в условиях визуальных ограничений. Тим Бернерс-Ли однажды сказал: «Веб — это не просто набор веб-страниц, это способ мышления». Аналогично, HAIC — это не просто алгоритм управления, а способ восприятия роботом окружающего мира, позволяющий ему не просто реагировать на события, но и предвидеть их. Создание такой системы требует не жесткой архитектуры, а гибкой экосистемы, способной адаптироваться к непредсказуемости реального мира. Ошибки в системе — это не провалы, а возможности для её улучшения и эволюции.
Что Дальше?
Представленная работа, стремясь к гибкому взаимодействию гуманоидного робота с объектами в условиях ограниченной видимости, лишь подчеркивает фундаментальную истину: система сложна не своей архитектурой, а связями. Разделение управления на модули — это иллюзия контроля, временное облегчение перед неизбежным каскадом отказов. Создание «динамически осведомленной модели мира» — не решение, а лишь более изощренный способ отложить столкновение с энтропией.
Будущие исследования неизбежно столкнутся с вопросом не о точности предсказания динамики объекта, а о масштабируемости самой модели. Каждый добавленный объект, каждая новая степень свободы — это потенциальная точка отказа, слабое место в паутине зависимостей. В конечном итоге, робот не сможет предсказать все возможные сценарии, и система неизбежно рухнет, как карточный домик. Успех не измеряется устойчивостью к сбоям, а скоростью восстановления после них — способностью быстро адаптироваться к хаосу.
Попытки создать полностью автономную систему взаимодействия — это наивное стремление к абсолютному контролю. Более реалистичным путем является признание неизбежной взаимозависимости робота и окружающей среды, разработка механизмов для совместной эволюции, и, возможно, даже готовности к контролируемому разрушению в случае необходимости. Всё связанное когда-нибудь сломается синхронно, и от нас зависит, как мы к этому подготовимся.
Оригинал статьи: https://arxiv.org/pdf/2602.11758.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- OnePlus Nord 6 ОБЗОР: чёткое изображение, замедленная съёмка видео, скоростная зарядка
- Российский рынок: между ставкой ЦБ, геополитикой и отчетами компаний (25.03.2026 17:32)
- Неважно, на что вы фотографируете!
- Как самому почистить матрицу. Продолжение.
- MSI Katana 17 HX B14WGK ОБЗОР
- Что купить фотографу. Рекомендации
- Что такое светосила. Какой светосильный объектив выбрать.
- Oppo K14 Turbo Pro ОБЗОР: большой аккумулятор, плавный интерфейс, скоростная зарядка
- Как исправить ситуацию, когда Windows 10 и 11 не обнаруживают второй монитор
- Как правильно фотографировать ночью
2026-02-13 11:12