Автор: Денис Аветисян
Исследователи разработали систему, которая одновременно оптимизирует форму робота и алгоритмы управления для бережной манипуляции деформируемыми и хрупкими предметами.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"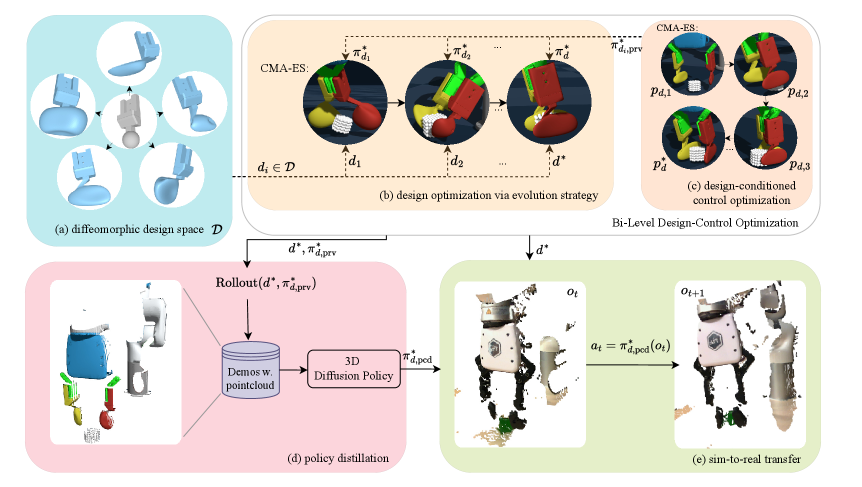
Предложен фреймворк совместного проектирования морфологии манипулятора и стратегии управления, обеспечивающий улучшенную производительность и снижение повреждений при работе с деформируемыми объектами.
Манипулирование деформируемыми и хрупкими объектами остается сложной задачей в робототехнике из-за трудностей, связанных с контактной динамикой и необходимостью сохранения целостности объектов. В работе, озаглавленной ‘Latent Diffeomorphic Co-Design of End-Effectors for Deformable and Fragile Object Manipulation’, представлен первый фреймворк совместного проектирования, одновременно оптимизирующий морфологию концевого эффектора и стратегию управления для работы с такими объектами. Разработанный подход использует параметризацию формы на основе диффеоморфизмов и позволяет снизить риск повреждения объекта при манипуляциях. Сможет ли данная методика вывести робототехнику для работы с деликатными объектами на качественно новый уровень, приближая ее к возможностям человека?
Трудности деликатной манипуляции
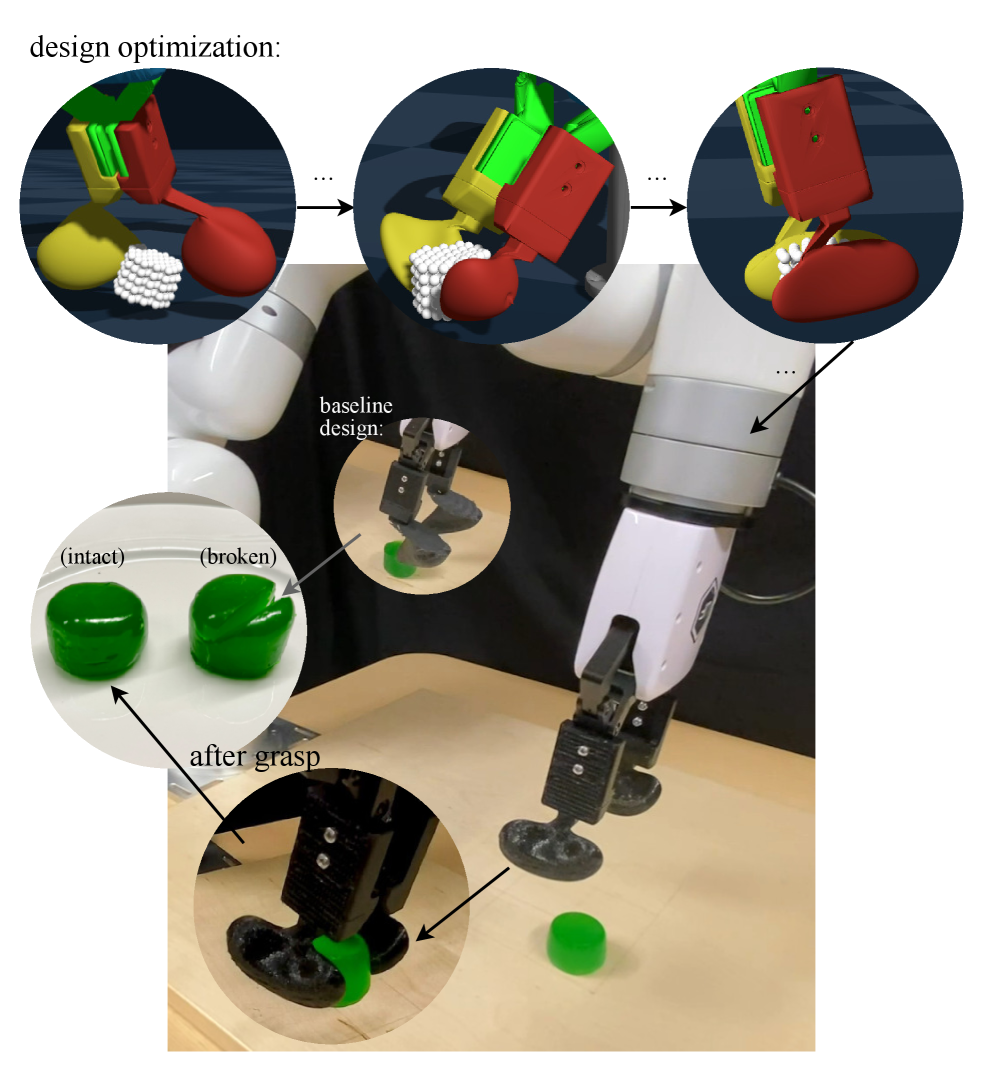
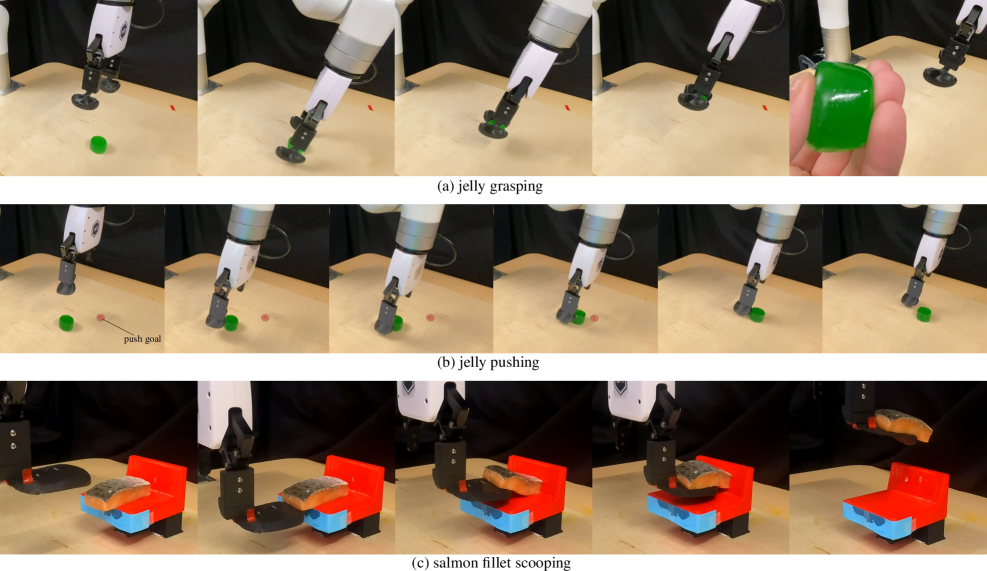
Традиционные роботизированные захваты, такие как параллельно-губковый захват, часто сталкиваются с трудностями при работе с деформируемыми и хрупкими объектами. Например, попытки захватить желеобразные предметы, известные как “Jelly Grasping”, нередко приводят к их повреждению или полному разрушению. Проблема заключается в том, что эти захваты, спроектированные для работы с жесткими предметами, оказывают чрезмерное давление и не способны адаптироваться к мягкой структуре и изменчивой форме подобных объектов. В результате, даже аккуратные на первый взгляд движения могут приводить к деформации, разрывам или неконтролируемому скольжению, делая манипуляции с деликатными предметами сложной задачей для современной робототехники.
Успешная манипуляция деформируемыми и хрупкими объектами требует глубокого понимания деформационного поведения объекта (DFOM) и прецизионного контроля прикладываемой силы. Исследования показывают, что стандартные подходы к захвату, основанные на фиксированных усилиях, часто приводят к повреждению таких предметов, как фрукты или мягкие ткани. Необходимость заключается в разработке систем, способных адаптироваться к изменяющимся свойствам объекта и окружающей среде, используя сенсорную информацию для оценки деформации в реальном времени и корректировки прикладываемой силы. Такой подход позволяет не только избежать повреждений, но и обеспечить надежный захват и перемещение даже самых деликатных предметов, открывая новые возможности для автоматизации в пищевой промышленности, медицине и других областях, где требуется бережное обращение с объектами.
Существующие методы роботизированной манипуляции зачастую демонстрируют недостаточную приспособляемость к изменяющимся характеристикам объектов и неопределенности внешней среды. Это проявляется в трудностях при работе с предметами различной мягкости, формы и веса, а также в условиях колебаний температуры, освещенности или наличия препятствий. Алгоритмы, разработанные для работы с жесткими и стандартизированными объектами, оказываются неэффективными при взаимодействии с деформируемыми материалами или в непредсказуемых ситуациях. Неспособность учитывать эти факторы приводит к снижению точности захвата, увеличению риска повреждения объекта и, в конечном итоге, к неуспешному выполнению поставленной задачи, подчеркивая потребность в более интеллектуальных и адаптивных системах управления роботами.
Неспособность существующих роботизированных систем аккуратно обращаться с деформируемыми и хрупкими объектами подчеркивает острую необходимость в разработке принципиально новых подходов к манипулированию. Требуется создание роботов, способных не просто захватывать предмет, но и адаптировать усилия и стратегию захвата в реальном времени, учитывая индивидуальные свойства объекта и внешние факторы. Это предполагает переход от жестких, заранее запрограммированных движений к гибким, саморегулирующимся алгоритмам, которые позволяют роботу “чувствовать” объект и реагировать на малейшие изменения, предотвращая повреждения и обеспечивая надежное выполнение задач. Перспективы в данной области связаны с использованием сенсорных технологий, алгоритмов машинного обучения и новых материалов, позволяющих создавать роботизированные манипуляторы, способные к деликатному и адаптивному взаимодействию с окружающим миром.
Совместное проектирование: морфология и управление в гармонии
Предлагаемый подход `Co-Design` представляет собой методологию, направленную на одновременную оптимизацию как физической структуры (морфологии) манипулятора, так и стратегии управления роботом. В отличие от традиционных методов, где морфология и управление разрабатываются последовательно или независимо, `Co-Design` рассматривает их как взаимосвязанные параметры. Это позволяет исследовать более широкий спектр возможных конфигураций, учитывая, что оптимальная морфология может зависеть от выбранной стратегии управления, и наоборот. Оптимизация проводится совместно, что позволяет добиться улучшения характеристик робота в целом, а также повысить его адаптивность к различным задачам и условиям.
Подход совместного проектирования позволяет создавать роботов, специализированных для выполнения деликатных манипуляционных задач. Традиционно, морфология (физическое строение) робота и стратегия управления разрабатываются раздельно, что часто приводит к компромиссам в производительности. Совместное проектирование, напротив, рассматривает морфологию и управление как взаимосвязанные параметры, оптимизируя их одновременно. Это позволяет создавать роботов с уникальной геометрией и алгоритмами управления, адаптированными для конкретных задач, требующих высокой точности, минимального воздействия и стабильности при взаимодействии с хрупкими объектами. Такая специализация обеспечивает значительное улучшение характеристик по сравнению с универсальными роботами, не оптимизированными для подобных операций.
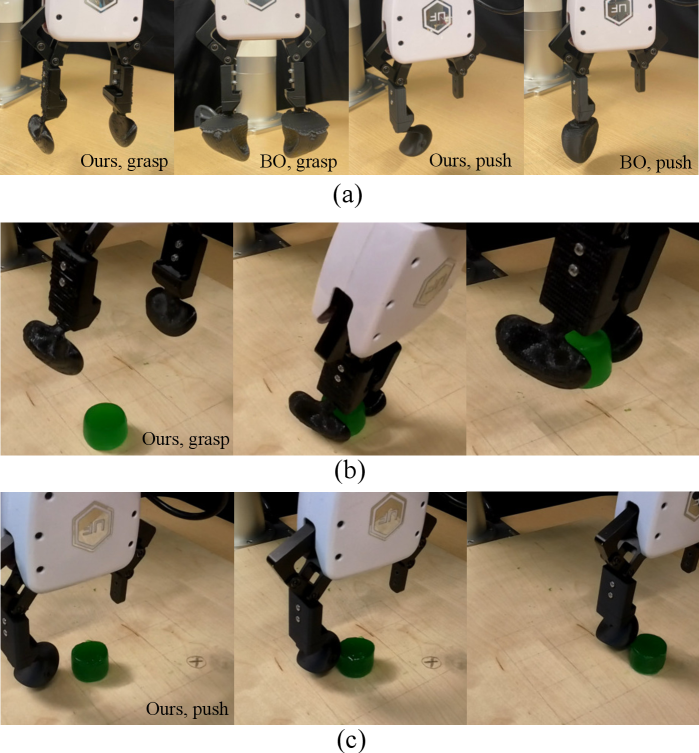
Для реализации совместной оптимизации морфологии и стратегии управления используются методы, такие как обучение с подкреплением (Reinforcement Learning) и байесовская оптимизация (Bayesian Optimization). Эти алгоритмы позволяют эффективно исследовать обширное пространство возможных конфигураций робота, включая различные варианты геометрии конечного эффектора и параметры алгоритмов управления. Обучение с подкреплением определяет оптимальные действия робота посредством взаимодействия со средой и получения вознаграждения за успешное выполнение задачи. Байесовская оптимизация, в свою очередь, использует вероятностные модели для прогнозирования производительности различных конфигураций и направляет поиск к наиболее перспективным решениям, минимизируя количество необходимых экспериментов.
Совместная оптимизация морфологии и стратегии управления позволяет добиться существенного повышения производительности и устойчивости робототехнических систем. Традиционно, морфология робота (например, структура и кинематика манипулятора) проектируется отдельно от алгоритмов управления. Однако, совместный подход позволяет учитывать взаимосвязь между этими аспектами, находя конфигурации, которые недостижимы при раздельном проектировании. Это приводит к улучшению показателей точности, скорости и адаптивности к изменениям внешней среды, что особенно важно для выполнения деликатных манипуляций и работы в условиях неопределенности. Получаемые решения характеризуются повышенной эффективностью и надежностью в широком диапазоне задач.
Выразительное проектирование с помощью латентных диффеоморфизмов
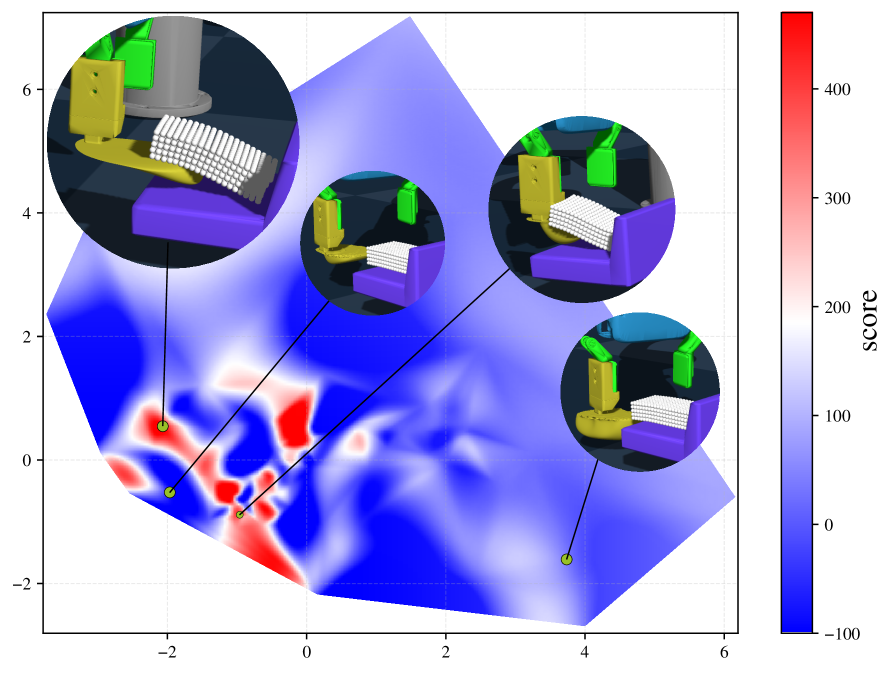
Метод `Latent DiffeoMorphism (LDM)` представляет собой новую технику параметризации формы, предназначенную для создания выразительных и в то же время физически правдоподобных конструкций концевых эффекторов. В основе LDM лежит использование диффеоморфизмов — гладких и обратимых преобразований — для деформации базовой формы. Это позволяет генерировать широкий спектр геометрических вариаций, сохраняя при этом топологическую структуру и физическую реализуемость конструкции. В отличие от традиционных методов параметризации, LDM позволяет эффективно исследовать пространство форм, избегая нефизичных или трудноизготовимых конфигураций, что критически важно для задач робототехники и манипуляций.
Комбинация предложенного метода и двухуровневой оптимизации позволяет эффективно исследовать пространство возможных конструкций манипуляторов, выявляя морфологии, максимизирующие производительность при выполнении задач манипулирования. Двухуровневый подход позволяет оптимизировать как геометрию манипулятора, определяемую параметрами, так и стратегию управления. Внешний цикл оптимизации настраивает форму манипулятора, а внутренний — параметры управления, что позволяет находить конструкции, оптимальные для конкретной задачи, учитывая ограничения на физическую реализуемость и производительность. Такой подход позволяет преодолеть сложность поиска оптимальных конструкций в многомерном пространстве параметров.
Внешний цикл двухуровневой оптимизации предназначен для оптимизации формы концевого эффектора с использованием метода Latent DiffeoMorphism (LDM), определяя его геометрию. Внутренний цикл, параллельно, выполняет тонкую настройку стратегии управления для данной формы. Такая структура позволяет одновременно оптимизировать как физическую структуру концевого эффектора, так и алгоритм его управления, что обеспечивает достижение максимальной производительности манипуляций. Оптимизация выполняется итеративно: внешний цикл изменяет форму, а внутренний — параметры управления, пока не будет достигнут оптимальный баланс между формой и контролем.
Для эффективного решения задачи двухуровневой оптимизации, используемой в процессе проектирования, применяется алгоритм ковариационной стратегии эволюции (CMA-ES). CMA-ES демонстрирует высокую производительность при оптимизации нелинейных и невыпуклых функций, что критично для поиска оптимальной морфологии и стратегии управления. Алгоритм позволяет адаптировать ковариационную матрицу для более эффективного исследования пространства решений, обеспечивая сходимость к локальным или глобальным оптимумам даже в сложных многомерных задачах. В данном контексте, CMA-ES используется для одновременной оптимизации формы концевого эффектора и стратегии управления, что существенно сокращает время и вычислительные ресурсы, необходимые для достижения желаемых характеристик манипулирования.
Преодоление разрыва между реальностью и симуляцией: перенос знаний
Для преодоления трудностей, связанных с переносом политик, обученных в симуляции, в реальный мир, используется метод дистилляции политик «учитель-ученик». Этот подход предполагает передачу знаний от сложного, высокоэффективного «учителя» — контроллера, идеально работающего в виртуальной среде — к более простому и экономичному «ученику», предназначенному для применения в реальных условиях. По сути, «ученик» учится имитировать поведение «учителя», но с меньшими вычислительными затратами и большей устойчивостью к шумам и неточностям, характерным для реального мира. Данная техника позволяет эффективно сжимать сложные модели, сохраняя при этом большую часть их производительности, что особенно важно для роботизированных систем, где ресурсы ограничены.
В основе преодоления разрыва между виртуальной симуляцией и реальным миром лежит метод передачи знаний от сложного, высокопроизводительного контроллера — “учителя” — к более простому и эффективному “ученику”, предназначенному для практического применения. Этот процесс позволяет перенести накопленный опыт и навыки управления из детализированной симуляции, где ресурсы не ограничены, на реальную систему с ее ограничениями по вычислительной мощности и времени реакции. “Учитель” демонстрирует оптимальное поведение в виртуальной среде, а “ученик” обучается имитировать эти действия, адаптируясь к требованиям реального мира. Такой подход обеспечивает не только повышение надежности и эффективности управления, но и возможность масштабирования системы для решения более сложных задач манипулирования объектами.
Для преодоления разрыва между симуляцией и реальным миром, а также достижения надежных результатов в задачах манипулирования, таких как толкание желе и захват филе, была применена комбинация метода дистилляции политик и переноса обучения из симуляции в реальность. Результаты показали значительное улучшение показателей успешности: в задаче толкания желе наблюдается прирост на 6,4%, а в задаче захвата желе — впечатляющие 33%. Данный подход позволяет не только повысить эффективность выполнения манипуляций, но и сделать их более аккуратными, что особенно важно при работе с деликатными объектами.
Исследования показали, что применение разработанного подхода значительно повышает успешность манипуляций и снижает вероятность повреждения объектов. В ходе экспериментов с манипуляциями с желе, удалось добиться впечатляющих результатов: зафиксировано снижение напряжения на 36% при захвате желе и на 6,6% при его перемещении. Данное снижение напряжения напрямую указывает на более бережное и аккуратное обращение с деликатными объектами, что крайне важно для задач, требующих высокой точности и предотвращения деформации. Полученные данные подтверждают эффективность предлагаемого метода в контексте роботизированной манипуляции и открывают перспективы для его применения в различных областях, где требуется бережное и надежное обращение с хрупкими предметами.
Исследование демонстрирует, что совместная оптимизация морфологии инструмента и стратегии управления позволяет значительно повысить эффективность манипулирования деформируемыми объектами. Этот подход позволяет учитывать естественные свойства объекта, минимизируя повреждения и повышая общую надежность процесса. Как отмечал Карл Фридрих Гаусс: «Трудно представить себе что-либо более полезное, чем развитие способности к абстрактному мышлению». В данном случае, абстрактное мышление проявилось в возможности представить себе оптимальную форму инструмента и соответствующую стратегию управления, как единую систему, способную адаптироваться к сложным условиям манипулирования. Предложенный фреймворк co-design выходит за рамки простого улучшения производительности, предлагая более элегантное и устойчивое решение, которое учитывает временную природу систем и необходимость адаптации к изменениям.
Что впереди?
Представленная работа, оптимизируя одновременно и морфологию манипулятора, и стратегию управления, демонстрирует, что усовершенствование лишь одного аспекта — недостаточно. Однако, следует признать, что предложенный подход, хоть и эффективен для конкретного класса деформируемых объектов, всё ещё далёк от универсальности. Архитектура, лишённая исторической перспективы, всегда остаётся хрупкой. Необходимо учитывать не только текущие требования к манипулированию, но и предвидеть будущие, возможно, совершенно иные задачи.
Очевидным направлением дальнейших исследований является расширение класса рассматриваемых объектов. Современные алгоритмы, как правило, фокусируются на относительно простых деформациях. Сложные, многослойные материалы, требующие учета внутренних напряжений и нелинейной деформации, остаются серьезной проблемой. Каждая задержка в решении этой задачи — это цена понимания фундаментальных свойств таких материалов.
В конечном счете, истинный прогресс заключается не в создании идеальных манипуляторов для существующих задач, а в разработке систем, способных адаптироваться к новым вызовам. Все системы стареют, вопрос лишь в том, делают ли они это достойно. Поиск методов самообучения и эволюции морфологии, позволяющих манипуляторам самостоятельно оптимизировать свою структуру в ответ на изменяющиеся условия, представляется наиболее перспективным направлением.
Оригинал статьи: https://arxiv.org/pdf/2602.17921.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Российский рынок в зоне турбулентности: рубль, ставки и новые риски (10.04.2026 01:32)
- Oppo Find X9 Ultra ОБЗОР: большой аккумулятор, скоростная зарядка, чёткое изображение
- Неважно, на что вы фотографируете!
- Motorola Moto G34 ОБЗОР: большой аккумулятор, быстрый сенсор отпечатков, лёгкий
- Proton только что запустил альтернативу Google Workspace и Microsoft 365, ориентированную на конфиденциальность.
- Realme Narzo 70 ОБЗОР: плавный интерфейс, большой аккумулятор, замедленная съёмка видео
- IdeaPad Slim 3 15IRH10R ОБЗОР
- Canon EOS 80D
- Как использовать режимы съёмки P, S, A, M на фотоаппарате?
- 10 лучших OLED ноутбуков. Что купить в апреле 2026.
2026-02-23 22:01