Автор: Денис Аветисян
Новая разработка позволяет бимануальным роботам быстро адаптироваться к манипулированию ранее невиданными 3D-объектами, используя перенос знаний и минимальное количество примеров.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"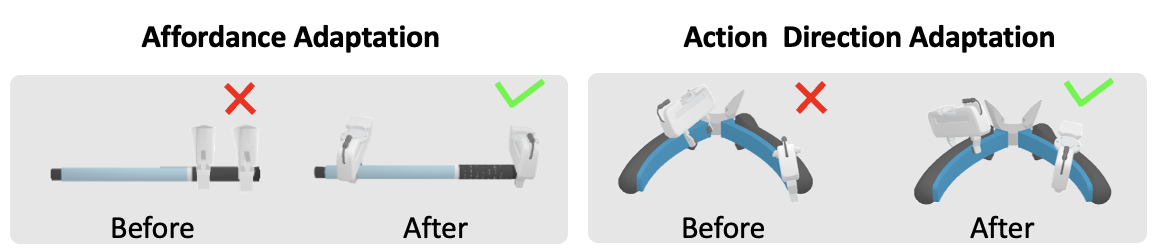
Представлен фреймворк Bi-Adapt, использующий фундаментальные модели для эффективной обобщающей бимануальной робототехники через перенос аффордансов и обучение с небольшим количеством данных.
Двуручное манипулирование роботами остается сложной задачей, требующей координации и адаптации к новым объектам. В данной работе представлена система ‘Bi-Adapt: Few-shot Bimanual Adaptation for Novel Categories of 3D Objects via Semantic Correspondence’, использующая возможности предварительно обученных моделей для эффективной обобщающей способности при манипулировании объектами новых категорий. Предложенный подход позволяет переносить знания об affordance (возможностях взаимодействия) между категориями, демонстрируя высокую эффективность при обучении с небольшим количеством данных. Сможет ли Bi-Adapt стать основой для создания более гибких и адаптивных роботизированных систем, способных к решению широкого спектра задач манипулирования в реальном мире?
Вызов надежного роботизированного захвата
Традиционные методы роботизированной манипуляции часто основываются на создании точных математических моделей объектов и окружающей среды. Однако, данная стратегия оказывается хрупкой в реальных, динамически меняющихся условиях. Любое отклонение от предварительно заданных параметров — будь то незначительное изменение положения объекта, неожиданное препятствие или неточность в измерении — может привести к сбою в захвате или манипуляции. Представьте себе робота, запрограммированного захватить определенный предмет на конвейере: даже небольшое смещение или вращение этого предмета может нарушить тщательно рассчитанную траекторию и привести к неудаче. В результате, роботы, полагающиеся исключительно на точное моделирование, демонстрируют ограниченную адаптивность и надежность в непредсказуемых ситуациях, что существенно снижает их применимость в широком спектре задач.
Существующие методы роботизированного захвата часто демонстрируют ограниченную способность к обобщению, что существенно снижает их применимость в реальных условиях. В отличие от контролируемых лабораторных сред, повседневный мир характеризуется разнообразием объектов, непредвиденными обстоятельствами и постоянными изменениями. Роботы, обученные захватывать конкретный набор предметов в определенной конфигурации, испытывают трудности при столкновении с незнакомыми формами, текстурами или положениями. Эта проблема обусловлена зависимостью от точных моделей объектов и предсказуемых сценариев, которые редко встречаются за пределами тщательно контролируемых условий. В результате, роботы часто терпят неудачу при попытке захватить новый предмет или адаптироваться к неожиданному препятствию, что ограничивает их потенциал в таких областях, как автоматизация складов, домашняя робототехника и поисково-спасательные операции.

Фундаментальные модели для расширенного восприятия
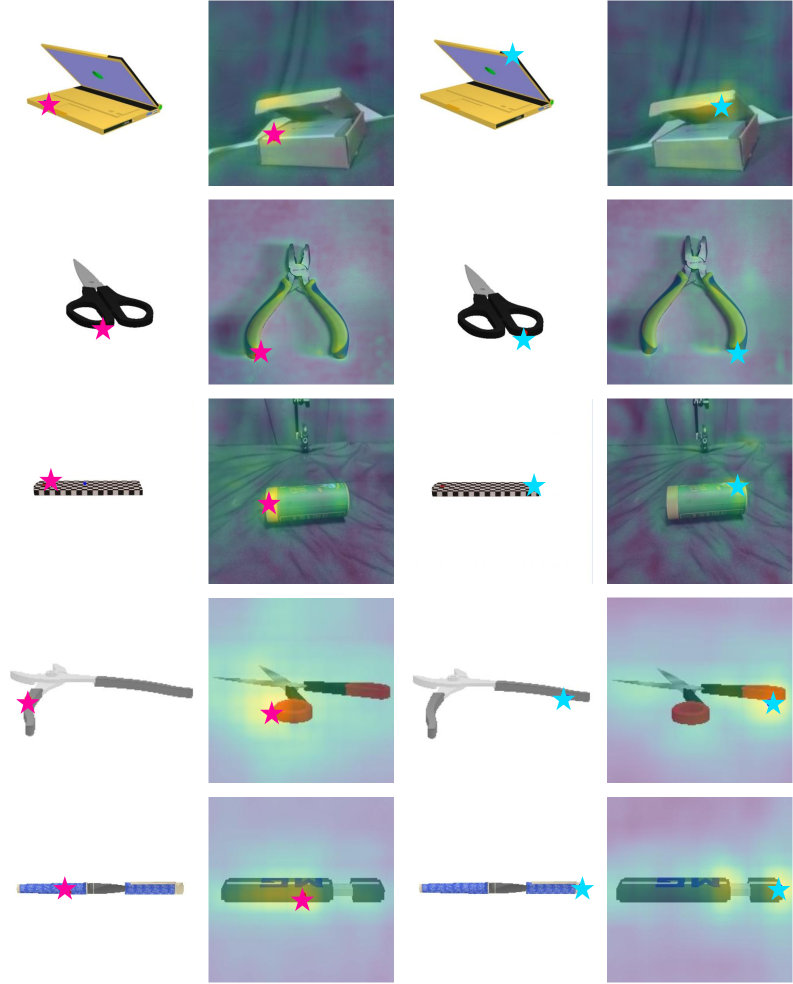
Визуальные фундаментальные модели, такие как DINOv2 и DiFT, обеспечивают извлечение богатых признаков, позволяя достичь семантического понимания изображений. Эти модели, обученные на больших объемах данных без явной разметки, способны генерировать векторные представления (эмбеддинги) изображений, сохраняющие семантическую информацию об объектах и их взаимосвязях. В отличие от традиционных сверточных нейронных сетей, они демонстрируют улучшенную обобщающую способность и устойчивость к изменениям в освещении, перспективе и окклюзии. Извлеченные признаки могут быть использованы для различных задач компьютерного зрения, включая классификацию, обнаружение объектов, сегментацию и, что особенно важно, для понимания семантического содержания изображения на более высоком уровне.
Основанные на моделях-фундаментах возможности семантического понимания изображений обеспечивают идентификацию семантической соответственности между объектами, что является критически важным для обучения выполнению действий (affordance learning). Установление связей между объектами и их потенциальными функциями позволяет агентам предсказывать, как с ними взаимодействовать. Например, модель может определить, что «стул» и «сидение» семантически связаны, что позволяет агенту понять, что стул предназначен для сидения. Этот процесс требует извлечения высокоуровневых признаков, которые кодируют не только визуальные характеристики объектов, но и их функциональное значение, позволяя моделям обобщать знания о взаимодействии с объектами в различных контекстах и ситуациях.
Комбинирование моделей визуального фундамента, таких как DINOv2 и DiFT, с методами, например, FoundationPose, и инструментами вроде SAM (Segment Anything Model), позволяет осуществлять надежную оценку позы объектов на основе данных, полученных из облаков точек. FoundationPose использует возможности извлечения признаков, предоставляемые этими моделями, для эффективной обработки и интерпретации облаков точек, что обеспечивает точное определение положения и ориентации объектов в пространстве. SAM, в свою очередь, предоставляет возможности сегментации, необходимые для идентификации и выделения целевых объектов в облаке точек, что повышает точность оценки позы. Такой подход позволяет добиться высокой устойчивости к шуму и неполноте данных, что критически важно для приложений в робототехнике, автономном вождении и 3D-реконструкции.
Bi-Adapt: Рамки для обобщенной манипуляции
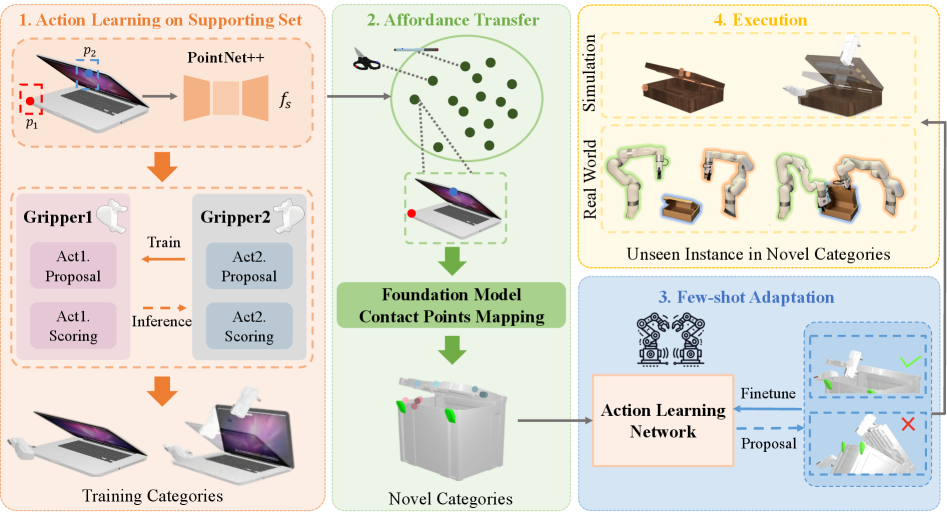
Би-Адапт использует предобученные модели и обучение с небольшим количеством примеров (few-shot learning) для достижения эффективной обобщающей способности в задачах двуручной манипуляции. Экспериментальные результаты демонстрируют, что система превосходит все существующие базовые решения (baselines) при работе с ранее не встречавшимися объектами и категориями. Это достигается за счет способности модели быстро адаптироваться к новым задачам, используя лишь небольшое количество демонстраций, что существенно повышает ее практическую применимость и снижает потребность в обширных наборах данных для обучения.
В основе Bi-Adapt лежат сети генерации и оценки действий. Сеть генерации предложений (Action Proposal Network) формирует набор потенциальных манипуляций, а сеть оценки действий (Action Scoring Network) определяет их наиболее вероятную эффективность. Обучение этих сетей осуществляется с использованием специализированных функций потерь: функция потерь геодезического расстояния (Geodesic Distance Loss) минимизирует расстояние между предложенными и оптимальными траекториями движения, в то время как функция потерь дивергенции Кулбака-Лейблера (KL Divergence) стимулирует разнообразие предложенных действий, способствуя более широкому охвату возможных решений и повышая устойчивость системы к новым сценариям.
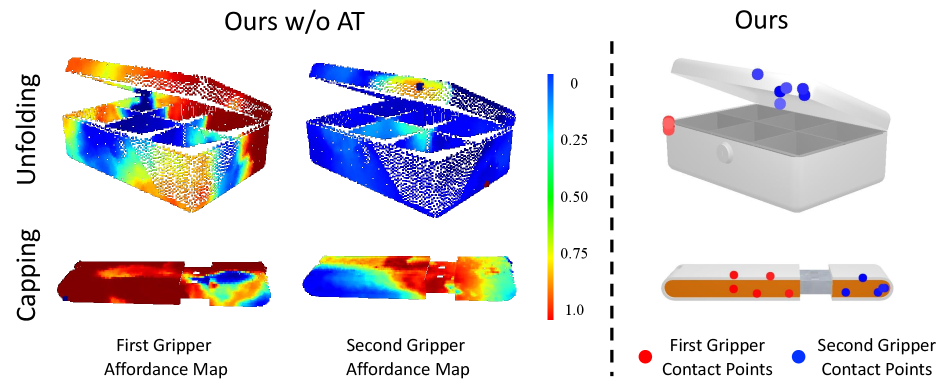
В Bi-Adapt реализован интеллектуальный выбор точек контакта, позволяющий системе оптимизировать точки взаимодействия для надежного захвата объектов. Этот подход позволяет значительно повысить устойчивость манипуляций, демонстрируя увеличение процента успешных выполнений задачи ‘Closing’ более чем на 30% при ограничении в 3 попытки взаимодействия. Оптимизация точек контакта осуществляется в процессе планирования захвата, что обеспечивает более эффективное и надежное выполнение манипуляций даже в условиях неопределенности и помех.
Обучение через демонстрацию и за её пределами
Обучение на основе восприятия доступных действий, усиленное обучением подражанию (Imitation Learning), позволяет роботам понимать, как взаимодействовать с окружающими предметами. Вместо простого распознавания объектов, робот учится определять, какие действия с ними возможны — можно ли предмет схватить, толкнуть, повернуть или использовать иным образом. Этот подход выходит за рамки традиционного машинного зрения, поскольку робот не просто «видит» предмет, а «понимает» его потенциал для выполнения конкретных задач. Обучение подражанию, в свою очередь, предоставляет роботу примеры успешных взаимодействий, позволяя ему быстро осваивать новые навыки и адаптироваться к различным ситуациям, что значительно повышает его эффективность и гибкость в реальном мире.
В результате интеграции полученных знаний об affordance с фреймворком Bi-Adapt, была создана система, демонстрирующая высокую эффективность при решении широкого спектра задач манипулирования. Исследования показывают, что данная система последовательно превосходит алгоритм DualAff при использовании одинакового объема данных для обучения. Превосходство достигается за счет более гибкого подхода к адаптации, позволяющего эффективно осваивать новые манипуляции и обобщать полученный опыт. Это обеспечивает значительное повышение производительности и надежности робота в различных условиях, открывая новые возможности для его применения в областях, требующих сложного и точного взаимодействия с объектами.
Способность к обобщению полученных знаний на новые, ранее не встречавшиеся ситуации, является ключевым фактором повышения автономности робототехнических систем, особенно в средах, ориентированных на взаимодействие с человеком. Такая адаптивность позволяет роботу эффективно выполнять задачи даже при незначительных изменениях в обстановке или при появлении новых объектов, не требуя перепрограммирования или повторного обучения. В результате, робот становится более надежным и предсказуемым помощником в различных сферах — от домашнего хозяйства до промышленного производства — и может самостоятельно решать широкий спектр задач, что существенно расширяет область его применения и потенциал для интеграции в повседневную жизнь.
Исследование Bi-Adapt демонстрирует, как системы могут адаптироваться к новым категориям трехмерных объектов, используя возможности трансферного обучения и ограниченное количество данных для взаимодействия. Этот подход подчеркивает важность не просто накопления метрик производительности, а создания среды, в которой система способна к постоянному обучению и самосовершенствованию. В связи с этим, уместно вспомнить слова Андрея Николаевича Колмогорова: «Вероятность — это мера нашей неопределенности». В контексте Bi-Adapt, неопределенность заключается в способности системы к обобщению на новые объекты, а вероятность успешной адаптации повышается за счет эффективного использования семантической переписки и трансферного обучения. Система, как и любая сложная структура, стареет, но её способность к адаптации и обучению определяет, насколько достойно она это делает.
Куда же дальше?
Представленная работа, несомненно, демонстрирует потенциал использования фундаметальных моделей для адаптации двуручного манипулирования. Однако, следует признать, что истинная проверка системы — это не скорость обучения, а устойчивость её архитектуры к неизбежному течению времени. Каждая задержка в понимании — это цена, которую необходимо заплатить за создание действительно надежной системы. Простого переноса аффордансов недостаточно; необходимо учитывать контекстуальную зависимость и неявные ограничения, присущие реальным объектам.
Особый интерес представляет вопрос о масштабируемости. Легко продемонстрировать успех на ограниченном наборе категорий объектов. Гораздо сложнее создать систему, способную эффективно адаптироваться к бесконечному разнообразию форм и материалов, которые встречаются в окружающем мире. Архитектура без истории — хрупка и скоротечна; необходимо разрабатывать механизмы сохранения и обобщения опыта, чтобы избежать повторения одних и тех же ошибок.
В конечном счете, будущее исследований в этой области связано не только с повышением эффективности обучения, но и с углубленным пониманием принципов, лежащих в основе двуручного манипулирования. Необходимо переосмыслить саму концепцию “аффорданса”, учитывая не только физические свойства объектов, но и когнитивные аспекты взаимодействия с ними. Ведь система, способная не просто манипулировать объектами, но и понимать их предназначение, — это уже шаг к созданию истинного искусственного интеллекта.
Оригинал статьи: https://arxiv.org/pdf/2602.08425.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- OnePlus Nord 6 ОБЗОР: чёткое изображение, замедленная съёмка видео, скоростная зарядка
- СПБ Биржа: «Газпром» в фаворе, «Т-техно» под давлением, дефицит юаней тревожит инвесторов (22.03.2026 22:33)
- Макросъемка
- Как самому почистить матрицу. Продолжение.
- Российский рынок: между ставкой ЦБ, геополитикой и отчетами компаний (25.03.2026 17:32)
- Прогнозы цен на эфириум к рублю: анализ криптовалюты ETH
- MINISFORUM добавляет опцию Ryzen 9 8945HX в линейку мини-ПК MS-A2
- Мозг и Искусственный Интеллект: Общая Система Координат
- От фотографий к фильмам: полное руководство по переходу на видеосъемку
- Официально делиться интимными изображениями женщины, но не получают последствий
2026-02-11 05:18