Автор: Денис Аветисян
Исследователи представляют DynaHOI — платформу и бенчмарк, призванные ускорить прогресс в области обучения роботов сложным манипуляциям с объектами в динамичных условиях.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"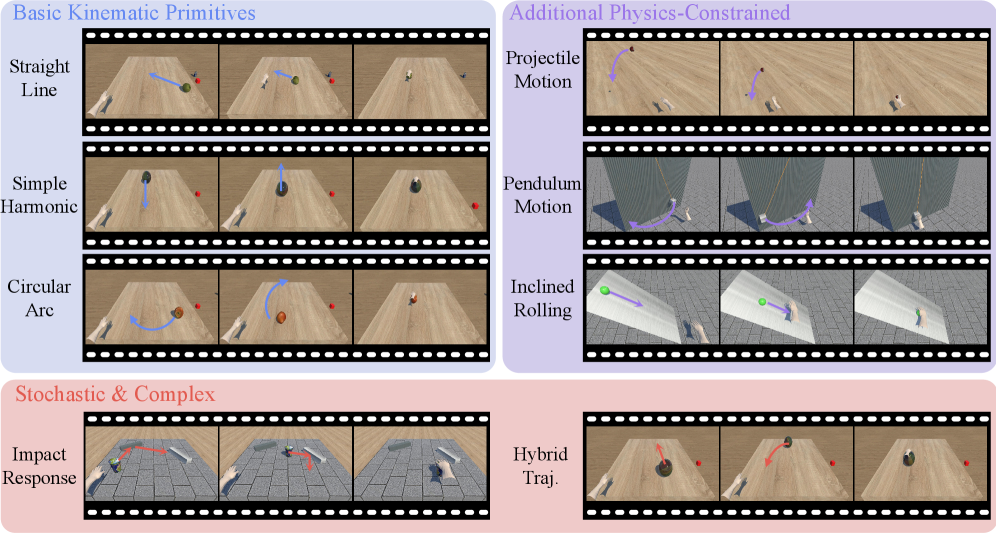
DynaHOI-Gym и DynaHOI-10M обеспечивают реалистичную симуляцию и оценку алгоритмов для динамического взаимодействия руки и объекта, преодолевая ограничения существующих бенчмарков.
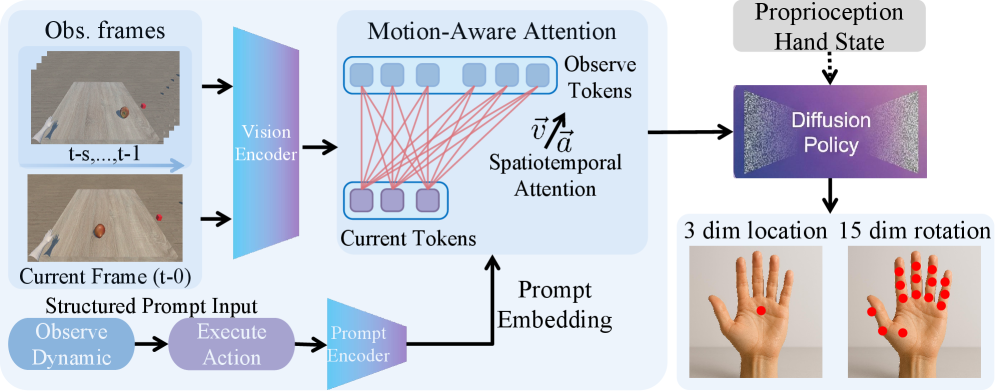
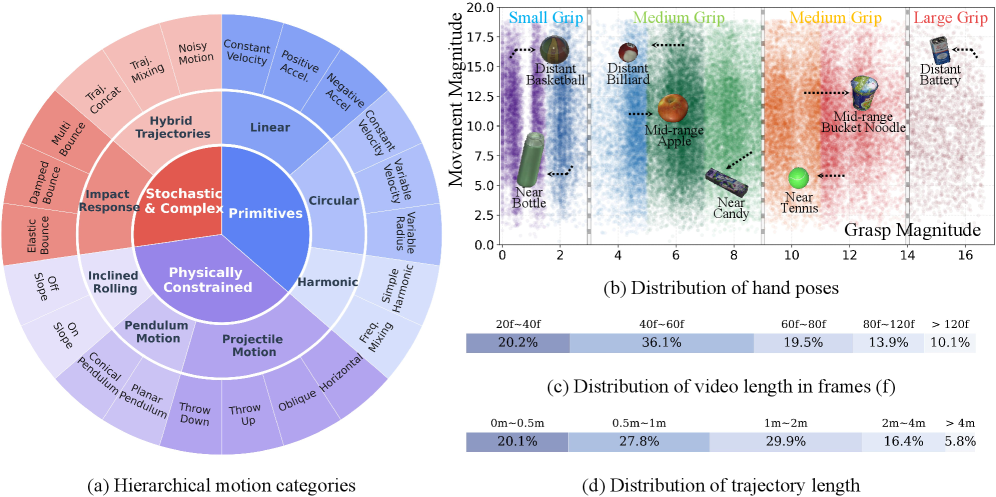
Существующие эталоны для генерации движений рук при взаимодействии с объектами зачастую фокусируются на статических сценариях, игнорируя динамические ситуации с движущимися целями и требующими координации в реальном времени. В работе ‘DynaHOI: Benchmarking Hand-Object Interaction for Dynamic Target’ представлен DynaHOI-Gym — унифицированная онлайн-платформа с параметрическими генераторами движений и метриками, основанными на развертке, для оценки захвата в динамических условиях, а также масштабный эталон DynaHOI-10M, включающий 10 миллионов кадров и 180 тысяч траекторий захвата. Разработанная базовая модель «наблюдай-действуй» (ObAct) демонстрирует улучшение точности захвата на 8,1% благодаря интеграции краткосрочных наблюдений с текущим кадром посредством пространственно-временного внимания. Сможет ли эта платформа стимулировать разработку более адаптивных и эффективных алгоритмов управления роботами в сложных динамических средах?
Динамический Захват: Вызов для Робототехники
Успешный перехват движущихся объектов роботизированными руками, известный как Динамический Захват, продолжает оставаться серьезной проблемой в области робототехники. Сложность заключается не только в скорости и точности движения манипулятора, но и в необходимости мгновенной адаптации к непредсказуемым траекториям полета объекта. Несмотря на значительный прогресс в разработке алгоритмов управления и сенсорных систем, надежное выполнение динамического захвата в реальных условиях, с учетом вариативности формы, массы и скорости объектов, до сих пор представляет собой сложную инженерную задачу. Успешная реализация данной технологии открывает широкие перспективы для автоматизации различных процессов, от сборки на конвейере до помощи в логистике и даже в сфере здравоохранения, но требует дальнейших исследований и инновационных подходов к управлению и восприятию.
Традиционные подходы к захвату движущихся объектов сталкиваются с серьезными ограничениями в скорости и адаптивности, необходимых для реальных условий. В большинстве случаев они опираются на заранее запрограммированные траектории движения манипулятора, что делает систему неспособной эффективно реагировать на непредсказуемые изменения в поведении объекта. Кроме того, часто используется ограниченный объем сенсорной информации, что снижает точность захвата и требует точного знания параметров движения объекта заранее. Эта зависимость от предварительного планирования и недостаточная реакция на внешние факторы существенно ограничивают возможности роботов в динамичных средах и препятствуют созданию действительно автономных систем захвата.
Разнообразие траекторий движения захватываемых объектов — будь то прямолинейное движение или периодические колебания — предъявляет повышенные требования к надежности и универсальности стратегий управления роботами. Успешная реализация динамического захвата требует алгоритмов, способных адаптироваться к непредсказуемым изменениям скорости и направления движения объекта в реальном времени. Необходима разработка систем управления, которые не просто реагируют на конкретную траекторию, но и предвидят возможные отклонения, обеспечивая устойчивый захват даже при сложных и нерегулярных движениях. Такой подход позволит роботам эффективно работать в динамичных средах, где объекты перемещаются по непредсказуемым путям, значительно расширяя область их применения.
Существующие методы динамического захвата объектов демонстрируют непостоянство в достижении высокой точности локализации и успешности захвата в сложных динамических средах. Анализ текущих бенчмарков показывает, что даже при относительно предсказуемых траекториях движения, стабильное выполнение захвата остается проблемой. Неспособность систем адаптироваться к непредвиденным изменениям в скорости, направлении или ориентации объекта приводит к снижению эффективности и увеличению числа неудачных попыток. Ученые отмечают, что для достижения надежного динамического захвата необходимы принципиально новые подходы к управлению, которые учитывают неопределенность окружающей среды и обеспечивают устойчивость к возмущениям, позволяя роботизированным системам успешно взаимодействовать с объектами в реальном времени и в сложных условиях.
DynaHOI: Платформа для Прогресса в Динамическом Захвате
Набор данных DynaHOI-10M представляет собой важный ресурс для обучения и оценки алгоритмов динамического захвата. Он содержит 10 миллионов примеров взаимодействий руки с объектами, охватывающих широкий спектр сценариев и типов объектов. Разнообразие включенных взаимодействий позволяет алгоритмам учиться обобщать и адаптироваться к различным условиям, что критически важно для разработки надежных систем манипулирования. Включены данные, полученные с использованием различных конфигураций руки и объектов, а также различные траектории движения, что обеспечивает реалистичность и полноту обучающего набора данных.
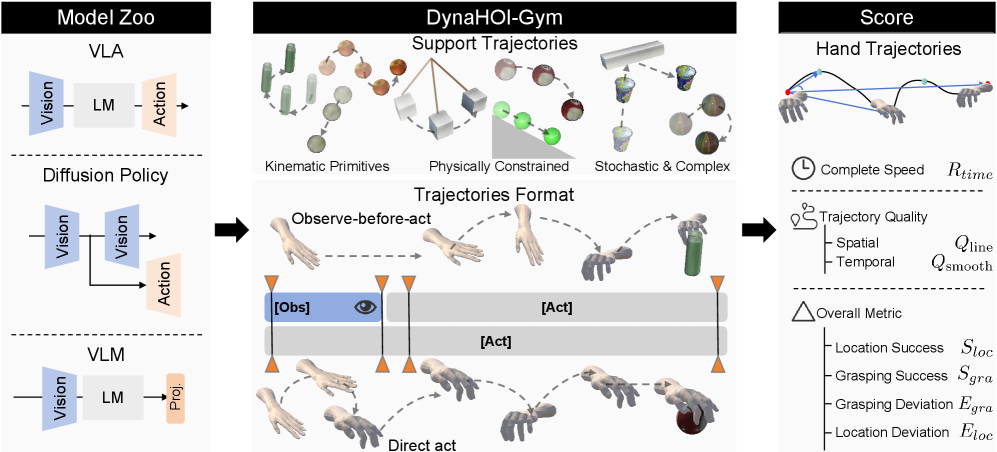
Платформа DynaHOI-Gym предоставляет исследователям возможность проводить строгие тесты и сравнительный анализ различных алгоритмов динамического захвата в среде замкнутого цикла и в режиме реального времени. В отличие от традиционных методов оценки, основанных на предопределенных траекториях, DynaHOI-Gym обеспечивает онлайн-оценку, позволяя алгоритмам взаимодействовать с симуляцией и адаптироваться к меняющимся условиям. Это позволяет получить более реалистичные и надежные результаты, отражающие производительность алгоритмов в практических сценариях. Среда поддерживает автоматизированное проведение экспериментов и сбор метрик, что значительно упрощает процесс исследования и сравнения различных подходов.
Платформа DynaHOI-Gym обеспечивает точное измерение ключевых метрик производительности, таких как качество траектории (Trajectory Quality), что позволяет количественно оценить эффективность различных стратегий управления. Данная метрика оценивает соответствие траектории захвата желаемой цели и учитывает такие параметры, как точность позиционирования, плавность движения и время выполнения. Использование DynaHOI-Gym позволяет исследователям объективно сравнивать различные алгоритмы, выявлять их сильные и слабые стороны, и, как результат, разрабатывать более эффективные и надежные системы управления для динамического захвата объектов.
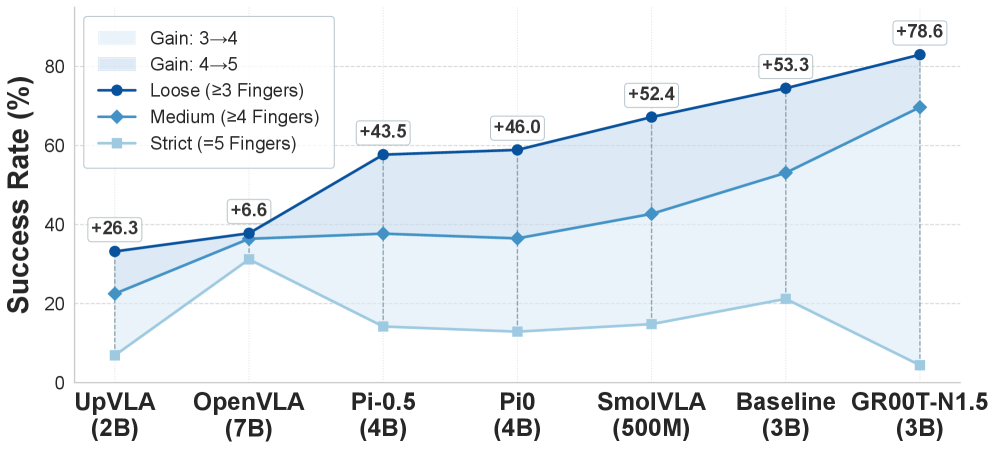
Унифицированная платформа DynaHOI-Gym обеспечивает систематическое исследование параметров алгоритмов динамического захвата, что способствует разработке более устойчивых и обобщенных решений. В результате внедрения данной платформы, наблюдается повышение точности определения местоположения объекта на 8.1% по сравнению с предыдущими моделями, основанными на диффузии. Это улучшение производительности демонстрирует эффективность платформы в оптимизации стратегий управления и повышении надежности систем взаимодействия рука-объект.
Генеративные Политики и Управление, Основанное на Наблюдении
Диффузионные политики представляют собой эффективный подход к генерации реалистичных и адаптируемых траекторий движения руки при динамическом захвате. В основе данного метода лежит принцип последовательного уточнения траектории, начиная с шумовой модели и постепенно приближаясь к желаемому движению. Это позволяет создавать траектории, которые не только достигают цели, но и учитывают различные факторы, такие как скорость и траектория движущегося объекта, а также ограничения, связанные с кинематикой руки. В отличие от традиционных методов планирования траекторий, диффузионные политики способны генерировать разнообразные и естественные движения, что особенно важно для решения сложных задач динамического захвата, требующих высокой степени адаптивности и точности.
Генеративные модели, используемые для управления траекториями захвата, часто дополняются принципами авторегрессионных моделей. Такой подход позволяет значительно повысить их прогностические возможности и стабильность. Авторегрессия позволяет модели предсказывать последующие состояния на основе предыдущих, что особенно важно для динамичных задач, где точное предсказание траектории объекта критично. Использование авторегрессионных компонентов позволяет учитывать временные зависимости в данных и генерировать более плавные и реалистичные траектории, улучшая общую производительность системы управления и обеспечивая более надежный захват.
Стратегия управления «Наблюдай-Прежде-Чем-Действовать» (Observe-Before-Act) предполагает сбор информации о движущейся цели перед началом перехвата. Данный подход позволяет роботу-манипулятору анализировать траекторию объекта и адаптировать планирование захвата на основе полученных данных. В отличие от реактивных стратегий, требующих немедленного ответа, «Наблюдай-Прежде-Чем-Действовать» обеспечивает более точное прогнозирование траектории и, как следствие, повышение эффективности перехвата, что подтверждается увеличением процента успешных перехватов на 8.1% и оптимизацией показателей качества траектории (Qline, Qsmooth), которые обычно находятся в диапазоне 0.9-1.0.
Фаза наблюдения, интегрированная с моделями «Vision-Language», значительно повышает способность руки точно предсказывать траекторию движущегося объекта и планировать эффективный захват. Это привело к зарегистрированному увеличению процента успешных локализаций на 8.1%. Внедрение данной стратегии также позволило оптимизировать показатели качества траектории (Qline, Qsmooth), которые обычно находятся в диапазоне 0.9-1.0, что свидетельствует о более плавных и точных движениях руки при перехвате объекта.
К Адаптивному и Контактному Манипулированию: Взгляд в Будущее
Способность точно перехватывать и захватывать движущиеся объекты является основополагающей для широкого спектра задач в реальном мире. От автоматизированной сборки и технического обслуживания до роботизированной помощи людям, успешное выполнение этих операций напрямую зависит от умения робота предвидеть траекторию движения объекта и скоординированно выполнить захват. Разработка эффективных алгоритмов перехвата позволяет роботам функционировать в динамичных средах, где объекты перемещаются непредсказуемо, что критически важно для повышения производительности и безопасности в различных областях применения. Усовершенствование этой способности открывает новые возможности для автоматизации сложных процессов и расширения сферы применения робототехники.
Современные алгоритмы управления, такие как те, что успешно протестированы в рамках платформы DynaHOI, открывают новые перспективы для роботов, способных безопасно и эффективно взаимодействовать с динамичной средой, включающей людей. Данные политики позволяют роботам адаптироваться к непредсказуемым изменениям в окружении, предвидеть действия человека и соответствующим образом корректировать свои движения. В отличие от традиционных, жестко запрограммированных систем, DynaHOI обеспечивает гибкость и устойчивость к помехам, что критически важно для применения роботов в реальных условиях, например, на производственных линиях, в больницах или в домашнем хозяйстве. Благодаря способности к адаптации и прогнозированию, роботы, управляемые подобными алгоритмами, могут не только избегать столкновений, но и активно сотрудничать с людьми, выполняя задачи совместно и повышая общую производительность.
Интеграция методов манипулирования с опорой на контакт значительно повышает надежность и ловкость роботизированных рук, позволяя им справляться с более широким спектром объектов. Традиционные захваты часто полагаются на предварительное знание формы и положения объекта, что ограничивает их применимость в динамичных и неструктурированных средах. В отличие от них, методы, основанные на контакте, позволяют роботу активно ощупывать объект во время захвата, корректируя положение пальцев и распределение силы для обеспечения надежного удержания даже при неидеальной информации. Это особенно важно для объектов сложной формы, хрупких материалов или предметов с неровной поверхностью, где традиционные подходы могут оказаться неэффективными или даже повредить объект. Благодаря использованию тактильных датчиков и алгоритмов управления, роботизированные руки, применяющие методы манипулирования с опорой на контакт, способны адаптироваться к различным условиям и выполнять задачи, требующие высокой точности и деликатности.
Оценка позы руки играет ключевую роль в обеспечении необходимой сенсорной обратной связи для точного управления и адаптации в процессе манипуляций. Данный процесс позволяет роботам не только захватывать объекты, но и корректировать свои действия в реальном времени, основываясь на тактильных ощущениях и визуальной информации. Целью подобных разработок является максимизация показателя успешности захвата (Sgra) — вероятности успешного удержания объекта — и одновременная минимизация ошибки локализации (Eloc), то есть точности определения положения и ориентации руки в пространстве. Достижение высокой точности в этих метриках критически важно для реализации надежных и гибких систем манипулирования, способных эффективно функционировать в сложных и динамичных условиях.
Представленная работа демонстрирует стремление к элегантности в области робототехники, создавая платформу DynaHOI-Gym и DynaHOI-10M, способную оценивать взаимодействие руки и объекта в динамичной среде. Этот подход подчеркивает важность последовательности интерфейсов — в данном случае, взаимодействия робота с миром — как проявление уважения к сложности задачи. Как однажды заметил Дэвид Марр: «Представление — это то, что система знает о мире». Эта фраза особенно актуальна в контексте DynaHOI, поскольку платформа требует от робота не просто манипулирования статичными объектами, но и предвидения их движения, что требует глубокого понимания и, следовательно, адекватного представления о динамике окружающего мира. Создание такой платформы для оценки динамических взаимодействий — это шаг к более интуитивным и эффективным робототехническим системам.
Что Дальше?
Представленные инструменты, DynaHOI-Gym и DynaHOI-10M, открывают, казалось бы, широкие возможности для оценки и развития алгоритмов взаимодействия руки и объекта. Однако, стоит признать, что элегантность решения не измеряется количеством симулированных сценариев, а глубиной понимания лежащих в основе принципов. Текущие метрики, оценивающие успех манипуляций, часто упускают из виду нюансы, определяющие не просто достижение цели, но и плавность, эффективность и адаптивность движения.
Истинный вызов заключается не в увеличении масштаба симуляций, а в разработке систем, способных к обучению “здравому смыслу” в контексте физического взаимодействия. Роботизированные системы, оперирующие в реальном мире, сталкиваются с непредсказуемостью, шумом и неточностями, которые редко учитываются в идеализированных симуляциях. Поэтому, перспективные исследования должны быть направлены на создание алгоритмов, способных к самообучению и адаптации в условиях неопределенности.
По сути, вопрос в том, чтобы перейти от простого достижения цели к созданию систем, демонстрирующих не только функциональность, но и “красоту” движения — ту самую, что свидетельствует о глубоком понимании физических законов и принципов оптимизации. В конечном счете, успех в этой области будет определяться не количеством публикаций, а способностью создать системы, которые действительно способны к эффективному и интуитивно понятному взаимодействию с окружающим миром.
Оригинал статьи: https://arxiv.org/pdf/2602.11919.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Нейросети как посредники: этика и границы взаимодействия с разумом
- Неважно, на что вы фотографируете!
- Как самому почистить матрицу. Продолжение.
- Российская экономика: замедление, дивиденды и ожидания снижения ставки ЦБ (02.04.2026 00:32)
- Российский рынок: Рубль, Нефть и Корпоративные Истории – Что Ждет Инвесторов? (02.04.2026 23:32)
- Калькулятор глубины резкости. Как рассчитать ГРИП.
- MSI Katana 17 HX B14WGK ОБЗОР
- Что такое глубина резкости в фотографии?
- vivo iQOO Z11 Turbo ОБЗОР: огромный накопитель, отличная камера, много памяти
- Microsoft возрождает функцию расширения браузера Edge спустя годы после отмены последнего теста
2026-02-14 09:03