Автор: Денис Аветисян
Исследователи представили устройство UMI-FT, позволяющее роботам более точно и безопасно взаимодействовать с окружающим миром.
Разработанный портативный датчик силы и момента обеспечивает адаптивное управление и повышает эффективность манипуляций роботов.
Несмотря на важность точной модуляции силы, широко распространенные датчики силы и момента (F/T) часто оказываются громоздкими, хрупкими и дорогостоящими, ограничивая возможности обучения роботов адаптивному манипулированию. В работе ‘In-the-Wild Compliant Manipulation with UMI-FT’ представлена портативная платформа UMI-FT, оснащенная компактными шестиосными датчиками силы и момента на каждом пальце, что позволяет измерять силу и момент непосредственно в точке контакта. Разработанная система позволила обучить адаптивную политику, предсказывающую целевые положения, силу захвата и жесткость, значительно улучшив производительность робота в задачах, требующих точного контроля силы. Открывает ли UMI-FT путь к созданию более гибких и эффективных роботов-манипуляторов, способных к обучению в реальных условиях?
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"Ограничения Традиционного Измерения Силы
Существующие методы измерения силы, такие как запястные тензодатчики (F/T) и тактильные сенсоры, часто сталкиваются с проблемой ограниченного охвата или сложной интеграции в систему. Запястные тензодатчики, хоть и обеспечивают точные измерения, ограничены в пространстве и не способны воспринимать силу, распределенную по всей поверхности объекта. Тактильные сенсоры, напротив, могут обеспечить более широкое покрытие, однако их интеграция в сложные манипуляторы или роботизированные руки зачастую требует значительных усилий и может приводить к снижению надежности. Это создает препятствия для точного и гибкого управления в задачах, требующих взаимодействия с объектами сложной формы или деликатной обработки, что ограничивает возможности роботов в сферах, где требуется высокая точность и адаптивность.
Ограничения существующих методов измерения силы, таких как датчики силы и момента, установленные на запястье, или тактильные датчики, существенно затрудняют достижение точного и гибкого управления в сложных задачах манипулирования. Недостаточное покрытие и громоздкость интеграции этих датчиков приводят к неполной информации о взаимодействии с объектами, что негативно сказывается на производительности роботов и их способности адаптироваться к изменяющимся условиям. В результате, роботы могут испытывать трудности при выполнении деликатных операций, требующих тонкой моторики и чувствительности к приложенным силам, что ограничивает их применение в таких областях, как сборка сложных механизмов, хирургия или взаимодействие с хрупкими объектами.
Точность измерения силы имеет решающее значение для широкого спектра задач, требующих деликатного контроля. В контексте взаимодействия человека и робота, высокоточные датчики силы позволяют оценивать приложенное усилие и обеспечивать безопасное и интуитивно понятное сотрудничество. Например, робот, оснащенный чувствительными датчиками, может адаптировать свое поведение, чтобы избежать причинения дискомфорта или травм человеку. Аналогично, в задачах оценки свойств материалов, таких как твердость или эластичность, точные измерения силы необходимы для получения достоверных результатов и характеристики материала с высокой степенью надежности. Развитие и внедрение передовых систем измерения силы открывает новые возможности для автоматизации сложных процессов и повышения качества взаимодействия в различных сферах.
UMI-FT: Новая Портативная Система Измерения Силы
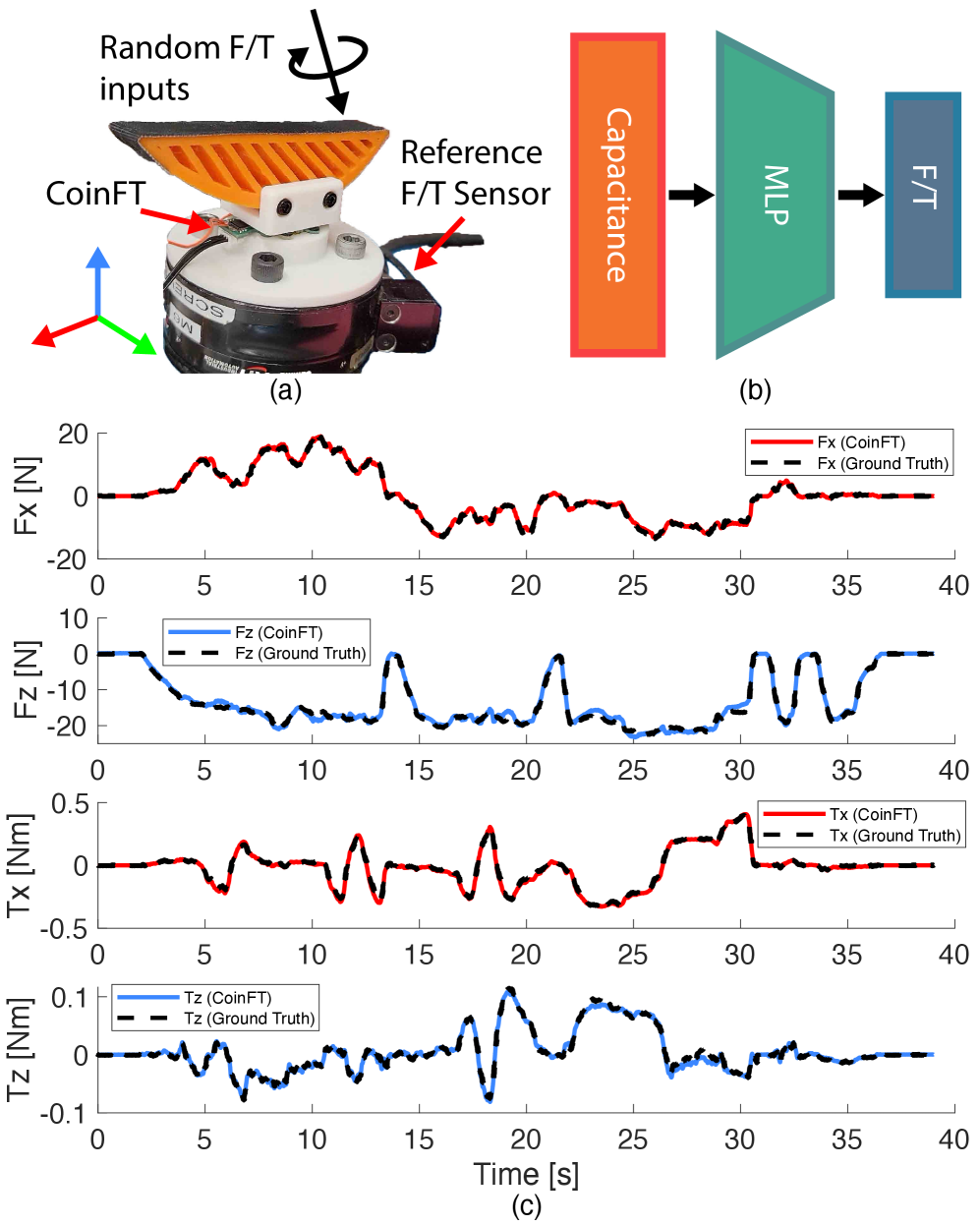
Представляем UMI-FT — новую портативную систему сбора данных, разработанную для всестороннего измерения силы при манипуляциях. Устройство предназначено для регистрации сил, возникающих при взаимодействии с объектами, и обеспечивает сбор информации о силах, прикладываемых оператором во время выполнения задач. Конструкция UMI-FT позволяет получать данные о силах и моментах, что делает его применимым в широком спектре задач, включая робототехнику, протезирование и анализ движений человека. Система разработана с учетом эргономики и удобства использования, что обеспечивает естественный и интуитивно понятный интерфейс для сбора данных.
Система UMI-FT использует разработанные на заказ датчики силы CoinFT, установленные на каждом пальце, что обеспечивает измерение силы по каждому пальцу и получение полной информации о силах. Калибровка системы демонстрирует погрешности в 0.18 Н, 0.15 Н и 0.58 Н для сил Fx, Fy и Fz соответственно, а также погрешности в 159 мНм, 231 мНм и 17 мНм для моментов Tx, Ty и Tz. Данные характеристики обеспечивают высокую точность измерения сил и моментов при манипуляциях.
Система UMI-FT расширяет возможности традиционных ручных устройств сбора данных за счет интеграции высокоточного измерения силы. В отличие от существующих решений, UMI-FT предоставляет детальную информацию о силах, прикладываемых каждым пальцем, что позволяет получить более полное представление о взаимодействии оператора с объектом. Это достигается благодаря использованию индивидуальных датчиков силы CoinFT, установленных на каждом пальце, и обеспечивает более естественный и информативный опыт взаимодействия, открывая возможности для детального анализа манипуляций и улучшения точности управления.
Адаптивное Управление Комплаенсом с UMI-FT
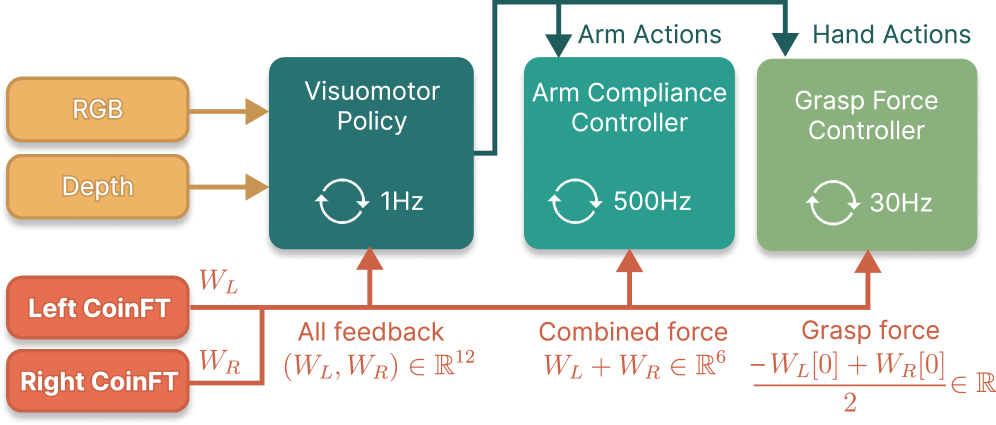
Разработанная адаптивная политика соответствия (compliance) использует высокоточные данные о силе, получаемые от UMI-FT, для регулирования как внешних сил контакта, так и внутренней силы захвата. Данная политика позволяет динамически изменять жесткость и демпфирование системы в зависимости от текущих условий взаимодействия с окружающей средой и характеристик удерживаемого объекта. Регулирование внешней силы контакта обеспечивает стабильное взаимодействие с объектами и предотвращает их повреждение, а контроль внутренней силы захвата гарантирует надежный и безопасный захват, адаптируясь к различным формам и текстурам объектов. Использование данных UMI-FT позволяет добиться более точного и быстрого реагирования на изменения в силах взаимодействия по сравнению с традиционными методами, основанными на менее точных датчиках.
Разработанная политика адаптивного управления комплаенсом основывается на существующих методах, таких как управление допуском (admittance control) и импедансом, но значительно улучшает их производительность за счет использования высокоточных данных о силе, получаемых от UMI-FT. Традиционные методы управления комплаенсом часто сталкиваются с проблемами при взаимодействии со сложными и непредсказуемыми средами. Интеграция данных о силе в режиме реального времени позволяет динамически корректировать параметры комплаенса, обеспечивая более стабильное и точное управление при контакте. Это особенно важно для задач, требующих точного поддержания силы, таких как захват хрупких объектов или выполнение операций, требующих обратной связи по силе.
Система адаптивного управления соответствием была протестирована на ряде сложных манипуляционных задач, продемонстрировав повышенную точность и адаптивность. В частности, при выполнении задачи нанизывания цуккини на шампур, система достигла 20 успешных попыток из 20, что значительно превосходит результат 4/20, полученный с использованием политик, обученных на ограниченном разнообразии сцен. Превосходство системы также наблюдалось в сценарии стирания белой доски, особенно при использовании более узкого ластика. Кроме того, система показала высокую эффективность при вставке лампочки, что объясняется улучшенным тактильным поиском необходимого положения.
Расширение Сенсорных Возможностей: ARKit и Перспективы
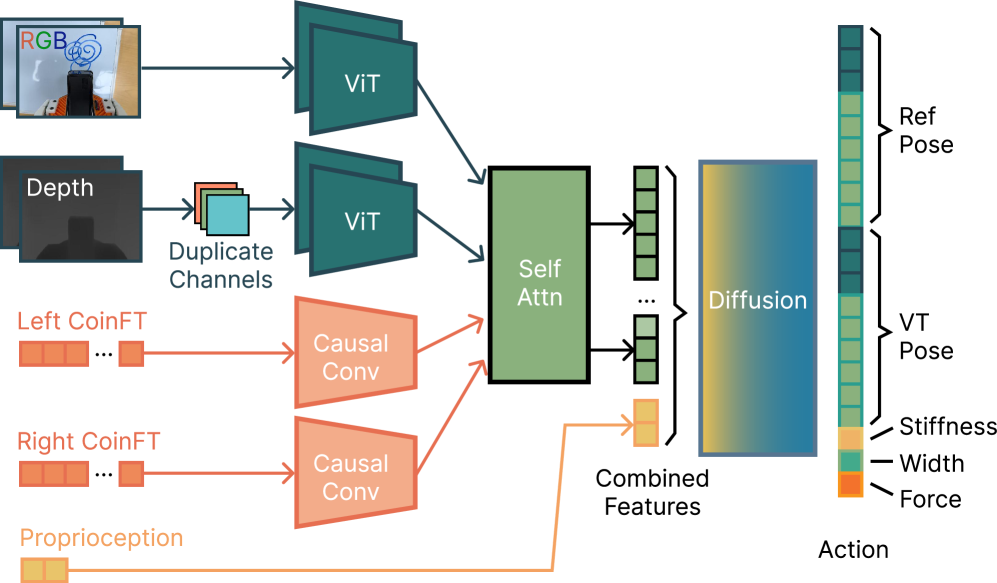
Для расширения возможностей сбора данных была осуществлена интеграция ARKit с UMI-FT, что позволило синхронизировать получение информации о цвете (RGB), глубине, положении в пространстве и усилиях. Такой подход обеспечивает одновременную регистрацию визуальных данных, трехмерной геометрии окружения, точной позы робота и информации о приложенных силах. В результате формируется комплексный поток мультимодальных данных, который значительно повышает точность и надежность анализа взаимодействия робота с окружающей средой, позволяя детально реконструировать сцену и характеристики выполняемых действий.
Сочетание различных потоков данных, включающих визуальную информацию, глубину, положение робота и данные о приложенной силе, позволяет получить всестороннее представление об окружающей среде и состоянии самого робота. Такой мультимодальный подход выходит за рамки анализа отдельных параметров, предоставляя возможность реконструкции полной картины взаимодействия. Это особенно важно для точного определения свойств объектов, оценки стабильности захвата и адаптации стратегии управления в реальном времени. Благодаря этому, система способна не только “видеть” и “чувствовать” окружающий мир, но и комплексно интерпретировать получаемые данные, обеспечивая более надежное и эффективное выполнение задач.
Архитектура системы не ограничивается возможностями ARKit и предусматривает интеграцию с другими сенсорными модальностями, что значительно расширяет спектр получаемой информации. В частности, добавление контактных микрофонов позволяет оценивать механические свойства взаимодействующих объектов — например, жесткость или текстуру поверхности. Анализ звуковых волн, возникающих при контакте, предоставляет уникальные данные, дополняющие визуальную и тактильную информацию, и позволяет роботу более точно понимать характер взаимодействия с окружающей средой. Такая мультисенсорная интеграция открывает перспективы для выполнения сложных манипуляций и адаптации к различным материалам и условиям.
Исследование представляет собой пример стремления к элегантности в робототехнике. Устройство UMI-FT, с его способностью к адаптивному управлению и точным контролю силы, демонстрирует, как сложность может быть уменьшена без потери функциональности. Как однажды заметил Брайан Керниган: «Простота — это высшая степень совершенства». Это особенно верно в контексте манипуляций роботами, где избыточная сложность может привести к неточностям и снижению эффективности. Разработка UMI-FT подчеркивает важность удаления ненужного, что позволяет создать более интуитивно понятную и эффективную систему, способную к точным манипуляциям в реальных условиях.
Куда же дальше?
Представленное исследование, сосредоточенное на повышении адаптивности манипуляций с помощью сенсоров силы и момента, обнажает скорее не завершенность, а избыточность. В стремлении к “точному” контролю, часто упускается фундаментальная простота: умение отбросить ненужное. Вместо усложнения системы, следует искать способы выявления и устранения тех факторов, которые мешают естественному взаимодействию робота с окружающей средой. Не столько важно, что робот чувствует, сколько то, как он реагирует на минимальный, очищенный от шума сигнал.
Очевидным направлением дальнейших исследований представляется не расширение сенсорных возможностей, а разработка алгоритмов, способных эффективно использовать ограниченный набор данных. Настоящая ловкость кроется не в количестве информации, а в умении извлекать суть из минимального набора признаков. Следует переосмыслить саму концепцию “обучения робота” — возможно, вместо навязывания сложных стратегий, достаточно создать условия для самоорганизации, позволяющие роботу самостоятельно находить оптимальные решения.
И в конечном счете, необходимо признать, что любая система, даже самая совершенная, обречена на несовершенство. Попытки создать идеально “адаптивную” систему — это тщетное стремление к иллюзии контроля. Истинная ценность заключается в принятии неизбежных ошибок и умении извлекать уроки из неудач. Простота — это не слабость, а признак зрелости.
Оригинал статьи: https://arxiv.org/pdf/2601.09988.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Деформация сеток: новый подход на основе нейронных операторов
- Новые смартфоны. Что купить в марте 2026.
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- Ближний Восток и Рубль: Как Геополитика Перекраивает Российский Рынок (02.03.2026 20:32)
- Microsoft Edge позволяет воспроизводить YouTube в фоновом режиме на Android — подписка Premium не требуется.
- vivo iQOO Z10x ОБЗОР: яркий экран, удобный сенсор отпечатков, объёмный накопитель
- МосБиржа на подъеме: что поддерживает рынок и какие активы стоит рассмотреть? (27.02.2026 22:32)
- vivo X300 FE ОБЗОР: скоростная зарядка, беспроводная зарядка, плавный интерфейс
- Российский рынок в 2025: Инвестиции, Экспорт и Новые Возможности (27.02.2026 15:32)
- Xiaomi Poco M7 ОБЗОР: плавный интерфейс, удобный сенсор отпечатков, большой аккумулятор
2026-01-17 12:50