Автор: Денис Аветисян
Исследователи представили систему TouchGuide, позволяющую роботам выполнять сложные задачи манипулирования, используя одновременную обработку визуальной и тактильной информации.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"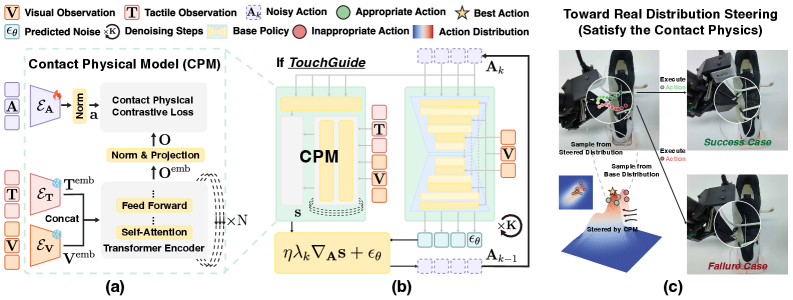
Предложен фреймворк TouchGuide и система сбора данных TacUMI для обучения роботов с использованием визуо-тактильной интеграции и диффузионных моделей.
Несмотря на значительный прогресс в области робототехники, точное манипулирование объектами, требующее тактильного взаимодействия, остается сложной задачей из-за недостаточного использования тактильной обратной связи. В данной работе представлена система ‘TouchGuide: Inference-Time Steering of Visuomotor Policies via Touch Guidance’, предлагающая новый подход к слиянию визуальной и тактильной информации для управления роботами. TouchGuide использует тактильное «руководство» для уточнения действий, генерируемых предварительно обученной моделью, обеспечивая соответствие физическим ограничениям контакта. Может ли предложенный подход, включающий систему сбора данных TacUMI, стать ключевым шагом к созданию более надежных и универсальных роботов-манипуляторов?
Трудности Точного Манипулирования
Роботизированные манипуляции часто сталкиваются с трудностями при выполнении задач, требующих тонкой тактильной обратной связи и прецизионного управления. Проблема заключается в том, что стандартные системы, как правило, полагаются на заранее запрограммированные траектории движения или ограниченный поток сенсорных данных, что препятствует адаптации к изменяющимся условиям и непредсказуемым воздействиям. Отсутствие способности “чувствовать” объект и реагировать на малейшие изменения в силе или текстуре приводит к ошибкам при сборке сложных механизмов, обращении с хрупкими предметами или совместной работе с человеком. Повышение чувствительности и точности манипуляторов требует разработки новых сенсоров, алгоритмов обработки данных и систем управления, способных обеспечить плавное и надежное выполнение даже самых деликатных операций.
Традиционные методы роботизированной манипуляции зачастую основываются на заранее запрограммированных траекториях движения и ограниченном объеме информации, поступающей от датчиков. Такой подход существенно ограничивает способность робота адаптироваться к изменяющимся условиям или непредсказуемым ситуациям. Например, при сборке детали, даже незначительное отклонение от запланированной траектории может привести к ошибке. Ограниченность сенсорного ввода не позволяет роботу адекватно реагировать на контактные взаимодействия с объектами, что делает невозможным выполнение задач, требующих тонкой моторики и чувствительности. В результате, роботы, использующие подобные методы, оказываются неэффективными в динамичных и неструктурированных средах, где требуется гибкость и способность к обучению.
Сложные задачи, такие как сборка, обращение с хрупкими предметами или совместная работа с человеком, требуют принципиально новых, интеллектуальных подходов к управлению роботами. Традиционные методы, основанные на заранее запрограммированных траекториях или ограниченном сенсорном вводе, оказываются неэффективными в условиях, когда требуется адаптивность и тонкая моторика. Разработка систем, способных к обучению на основе опыта, анализу тактильных ощущений и предвидению последствий действий, становится ключевым направлением исследований. В частности, перспективным представляется использование алгоритмов машинного обучения с подкреплением, позволяющих роботу самостоятельно осваивать сложные манипуляции, оптимизируя свои движения и учитывая особенности обрабатываемых объектов. Такой подход открывает возможности для создания роботов, способных к выполнению задач, требующих не только точности, но и гибкости и способности к импровизации.

TacUMI: Высокоточная Система Сбора Данных
Система TacUMI представляет собой платформу для сбора данных о тонких манипуляциях, отличающуюся высокой точностью и экономичностью. Она позволяет собирать данные с высокой степенью детализации, что критически важно для обучения современных алгоритмов управления и робототехники. Экономичность достигается за счет использования доступных компонентов и оптимизации процесса сбора данных, что делает TacUMI привлекательным решением для исследовательских групп с ограниченным бюджетом. Высокая точность обеспечивается за счет интеграции передовых технологий отслеживания движений и калибровки, что позволяет получать надежные данные для обучения и анализа.
Система TacUMI использует технологии отслеживания движения, такие как Vive Tracker, для обеспечения точной регистрации положения манипуляторов и объектов. Поддерживаются различные методы локализации, включая одновременную локализацию и построение карты (SLAM), позволяющую создавать трехмерные модели окружения в реальном времени, и AR Motion Tracker, обеспечивающий отслеживание движения в дополненной реальности. Комбинация этих технологий позволяет достичь высокой точности и надежности при сборе данных о манипуляциях, а также адаптироваться к различным условиям и требованиям экспериментов.
Система TacUMI расширяет существующие методы сбора данных, такие как телеоперация, предоставляя надежную основу для обучения продвинутых стратегий управления. В ходе пользовательских исследований TacUMI демонстрирует превосходство над альтернативными системами, обеспечивая высокий процент валидных данных. Это достигается за счет комбинации точного отслеживания движения и оптимизированных протоколов сбора, что позволяет получать больше полезной информации для обучения моделей машинного обучения и робототехники. Высокий коэффициент валидности данных снижает потребность в ручной фильтрации и повышает эффективность процесса обучения.

TouchGuide: Слияние Визуальной и Тактильной Информации для Надежного Управления
TouchGuide представляет собой новую парадигму слияния визуальной и тактильной информации, предназначенную для управления предварительно обученными визуально-моторными политиками. В отличие от традиционных подходов, требующих обучения с нуля, TouchGuide использует существующие политики и корректирует их действия на основе тактильных данных. Этот кросс-политический подход позволяет системе адаптироваться к изменениям в окружающей среде и неопределенностям, возникающим при взаимодействии с объектами, не требуя переобучения всей системы. По сути, тактильные данные служат дополнительным каналом управления, обеспечивающим более точную и надежную работу манипулятора.
Система TouchGuide использует генеративные модели, в частности, диффузионные модели (Diffusion Model) и модели потокового соответствия (Flow Matching), для генерации управляющих действий на основе комбинированных визуальных и тактильных данных. Диффузионные модели генерируют действия путем постепенного добавления шума к данным и последующего обучения модели для восстановления исходного сигнала, что позволяет создавать реалистичные и разнообразные траектории движения. Модели потокового соответствия, в свою очередь, преобразуют данные в непрерывный поток, что упрощает процесс обучения и повышает эффективность генерации действий. Комбинирование визуальной информации с тактильными ощущениями, получаемыми от датчиков силы и тактильных изображений, позволяет системе адаптироваться к различным условиям и обеспечивать более надежное управление.
Система TouchGuide использует Контактную Физическую Модель (CPM) для оценки реализуемости действий, опираясь на данные, получаемые от датчиков силы и тактильных изображений. CPM позволяет предсказывать взаимодействие манипулятора с окружением и избегать столкновений или нестабильных состояний. При использовании данной модели, базовая успешность выполнения задачи составляет 36.2%, что демонстрирует эффективность подхода к интеграции тактильной информации для повышения надежности управления роботом.

Повышение Управления с помощью Классификаторной Наводки
Метод Classifier Guidance повышает эффективность TouchGuide за счет предоставления градиентов генеративным моделям, таким как Diffusion и Flow Matching. Эти градиенты служат сигналом обратной связи, направляющим процесс генерации траекторий, что позволяет более точно соответствовать заданным целям и ограничениям задачи. Предоставление градиентов позволяет генеративным моделям корректировать свои прогнозы, минимизируя отклонения от желаемого поведения и, следовательно, улучшая общую производительность системы управления.
Руководство классификатором обеспечивает согласованность действий с поставленными задачами и ограничениями, что приводит к повышению надежности работы системы. Предварительное обучение модели с использованием данного подхода позволило увеличить процент успешного выполнения задач до 62.50% по сравнению с исходными 39.17%. Данный прирост эффективности обусловлен более точным соответствием действий поставленным целям и ограничениям, что особенно важно для сложных задач манипулирования.
Интеграция подхода Classifier Guidance с Контактной Физической Моделью позволяет системе эффективно решать сложные и нюансированные задачи манипулирования. Комбинация этих двух компонентов обеспечивает более точное управление траекторией движения и взаимодействием с объектами, учитывая физические ограничения и свойства материалов. Это достигается за счет использования градиентов, предоставляемых Classifier Guidance, для корректировки действий генеративной модели в соответствии с предсказаниями Контактной Физической Модели, что позволяет системе адаптироваться к различным условиям и избегать столкновений или нестабильных состояний при манипулировании объектами сложной формы или с изменяющимися характеристиками.

Значение и Направления Дальнейших Исследований
Предложенная структура демонстрирует значительный потенциал для развития возможностей роботизированной манипуляции в таких областях, как сборка, здравоохранение и совместная робототехника. Благодаря усовершенствованным алгоритмам и интеграции различных сенсорных данных, роботы смогут выполнять сложные задачи с большей точностью и надежностью. В сфере сборки это может привести к автоматизации производственных процессов и повышению эффективности. В здравоохранении — к созданию роботизированных ассистентов для хирургии и реабилитации, обеспечивающих более щадящие и точные процедуры. А в области совместной робототехники — к созданию роботов-партнеров, способных безопасно и эффективно взаимодействовать с людьми в различных рабочих и бытовых сценариях, открывая новые перспективы для автоматизации и повышения производительности.
Эффективное объединение визуальной и тактильной информации открывает новые возможности для робототехники, позволяя машинам уверенно взаимодействовать с деформируемыми объектами и ориентироваться в неопределенных условиях. В отличие от традиционных систем, полагающихся преимущественно на зрение, данная методика позволяет роботу «чувствовать» объект, определять его форму и текстуру даже при частичной видимости или изменении положения. Это особенно важно при манипулировании тканями, кабелями или другими гибкими материалами, где точное визуальное определение формы затруднено. Благодаря тактильной обратной связи, робот способен адаптировать свои действия в реальном времени, предотвращая повреждение объекта и обеспечивая надежное выполнение задачи, даже в сложных и непредсказуемых окружениях.
Дальнейшие исследования направлены на расширение спектра решаемых задач для роботизированных систем, охватывая более сложные и разнообразные сценарии манипулирования. Особое внимание уделяется интеграции методов машинного обучения, что позволит роботам не только адаптироваться к изменяющимся условиям, но и повышать устойчивость к неопределенностям окружающей среды. Предполагается, что использование алгоритмов обучения с подкреплением и глубокого обучения позволит значительно улучшить способность роботов к обобщению опыта и освоению новых навыков без необходимости явного программирования, что является ключевым шагом на пути к созданию действительно автономных и гибких роботизированных помощников.

В представленной работе исследователи стремятся к элегантности в управлении роботами, объединяя зрение и осязание. Этот подход, безусловно, отражает стремление к упрощению сложных систем. Как однажды заметил Эдсгер Дейкстра: «Простота — это суть совершенства». Подобно тому, как TacUMI обеспечивает сбор данных, необходимых для обучения, так и стремление к ясности в алгоритмах управления роботами позволяет добиться большей эффективности и надежности. Очевидно, что сложность, связанная с манипуляциями в реальном мире, требует не просто обработки больших объемов информации, а и ее осмысленного структурирования, что, в свою очередь, ведет к созданию более понятных и управляемых систем. В конечном итоге, ясность — это минимальная форма любви к создаваемым алгоритмам.
Что Дальше?
Представленная работа, несмотря на кажущуюся элегантность слияния визуальной и тактильной информации, лишь слегка приоткрывает завесу над истинной сложностью манипулирования. Полагаться на диффузионные модели — всё равно что пытаться удержать воду в решете. Эффективность TacUMI, безусловно, заслуживает внимания, однако сбор данных, пусть и более экономичный, всё же остается узким местом. Истинное совершенство не в количестве собранных образцов, а в способности обойтись без них вовсе.
Будущие исследования неизбежно столкнутся с необходимостью преодоления хрупкости систем, основанных на слиянии модальностей. Должно быть найдено решение, позволяющее роботу адаптироваться к непредсказуемым изменениям в окружающей среде, не полагаясь на предварительно собранные данные. Поиск лежит в области моделей, способных к истинному пониманию физического мира, а не просто к статистическому сопоставлению признаков.
В конечном итоге, задача состоит не в создании всё более сложных алгоритмов, а в их упрощении. Истинная гениальность — в исчезновении автора, когда машина действует сама по себе, без необходимости в постоянном надзоре и вмешательстве. Лишь тогда можно будет говорить о действительно разумном манипулировании.
Оригинал статьи: https://arxiv.org/pdf/2601.20239.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Как сбросить приложение безопасности Windows, чтобы устранить проблемы в Windows 11 и 10
- vivo iQOO Z10x ОБЗОР: яркий экран, удобный сенсор отпечатков, объёмный накопитель
- Шоппинг в Гонконге. Где купить iPhone и iPad.
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- Простые советы, чтобы немедленно улучшить ваши фотографии.
- Нефть вниз, инфляция под контролем: что ждет российский рынок в апреле? (14.03.2026 04:32)
- Motorola Moto G67 Power ОБЗОР: яркий экран, плавный интерфейс, удобный сенсор отпечатков
- Nothing Phone (4a) Pro ОБЗОР: большой аккумулятор, скоростная зарядка, замедленная съёмка видео
- Лучшие смартфоны. Что купить в марте 2026.
- Лучшие ноутбуки с глянцевым экраном. Что купить в марте 2026.
2026-01-29 16:00