Автор: Денис Аветисян
Новая методика позволяет роботизированной руке осваивать сложные задачи, требующие точного контакта, благодаря обучению «от руки» и интеграции тактильных и визуальных данных.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
Исследователи разработали фреймворк DexTac, который использует обучение с демонстрацией и учитывает как силу, так и область контакта (центр давления) для повышения эффективности манипуляций.
Несмотря на значительный прогресс в области робототехники, надежное выполнение задач, требующих тактильного взаимодействия, остается сложной проблемой из-за ограниченности восприятия и управления контактом. В данной работе представлена система ‘DexTac: Learning Contact-aware Visuotactile Policies via Hand-by-hand Teaching’, предлагающая новый подход к обучению политик манипулирования, основанный на кинестетическом обучении и интеграции многомерных тактильных данных — включая распределение контактных сил и области контакта. Данный подход позволяет роботу автономно выбирать и поддерживать оптимальные области контакта, достигая высокой точности в сложных задачах, таких как работа с мелкими объектами, демонстрируя улучшение на 31.67% по сравнению с системами, использующими только информацию о силе. Не является ли обучение с использованием человеческих демонстраций и интеграция полного спектра тактильных ощущений ключевым шагом к созданию действительно ловких и надежных роботов-манипуляторов?
Тонкость осязания: вызовы сложного манипулирования
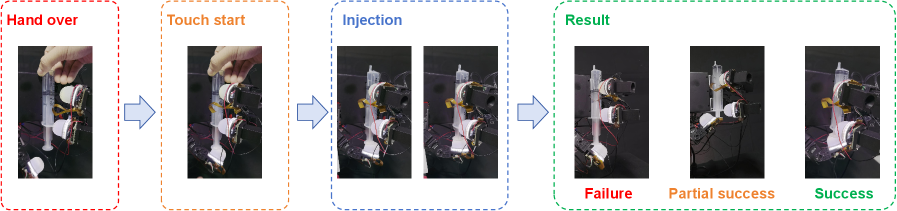
Выполнение деликатных манипуляций, таких как нажатие на шприц, требует от руки исключительной точности и координации, превосходящей возможности стандартных роботизированных систем. Традиционные роботы часто испытывают трудности с адаптацией к незначительным изменениям в силе или форме объекта, что делает их неэффективными для задач, требующих тонкого контроля. Сложность заключается не только в механической ловкости, но и в способности мгновенно корректировать движения, основываясь на сенсорной информации. В отличие от человека, способного интуитивно чувствовать сопротивление и адаптироваться к нему, роботам требуется сложная система обратной связи и алгоритмы управления для достижения сравнимого уровня мастерства. Поэтому разработка роботизированных систем, способных к подобным сложным манипуляциям, остается актуальной задачей современной робототехники.
Современные подходы к управлению сложными манипуляциями зачастую опираются на заранее запрограммированные траектории движения или громоздкое дистанционное управление, что значительно ограничивает гибкость и эффективность робототехнических систем. Такие методы, хотя и позволяют выполнить определенные задачи, демонстрируют низкую приспособляемость к меняющимся условиям и непредсказуемым внешним воздействиям. Предварительно заданные траектории не учитывают вариации в свойствах объектов или неточности в позиционировании, а дистанционное управление требует постоянного участия оператора, что снижает автономность и увеличивает временные затраты. В результате, роботы, использующие эти подходы, испытывают трудности при выполнении задач, требующих тонкой моторики и адаптации к реальным условиям, что ограничивает их применение в сферах, требующих высокой степени автоматизации и точности.
Эффективная интеграция тактильной и визуальной информации представляет собой серьезную проблему в области манипулирования сложными объектами. Роботизированные системы часто сталкиваются с трудностями при работе с непредсказуемыми силами контакта и изменяющимися свойствами объектов из-за неспособности адекватно обрабатывать сенсорные данные. Необходимо разработать алгоритмы, позволяющие роботу не только «видеть» объект, но и «чувствовать» его деформацию, текстуру и сопротивление, чтобы корректировать усилия и предотвращать повреждения. Успешное решение этой задачи позволит создать более адаптивные и надежные роботизированные системы, способные выполнять широкий спектр деликатных операций, требующих точного контроля и обратной связи.
DexTac: обучение на опыте эксперта
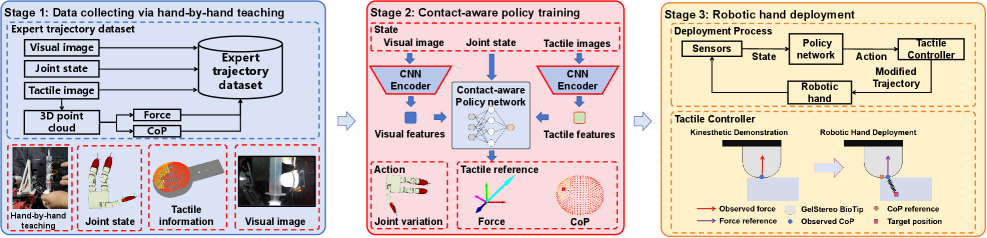
Система DexTac использует метод обучения «рука об руку» для сбора многомерных визуально-тактильных данных, формируя богатый набор данных для обучения политик управления. В процессе обучения оператор непосредственно направляет манипулятор, передавая интуитивную тактильную обратную связь и демонстрируя сложные манипуляции. Собранные данные включают в себя визуальную информацию, данные о силе и контактных областях, что позволяет создавать высокоточные модели и алгоритмы управления, способные к адаптации к различным условиям и задачам. Объем и разнообразие полученных данных существенно превосходят возможности сбора данных с использованием автономных методов обучения с подкреплением, что обеспечивает более быстрое и эффективное обучение.
Метод кинестетического обучения, используемый в DexTac, предполагает непосредственное руководство манипулятором человеком-оператором. Это позволяет передать сложные манипуляционные навыки посредством демонстрации, а также обеспечить интуитивную тактильную обратную связь. Оператор физически направляет руку робота, демонстрируя требуемые движения и корректируя действия в реальном времени. Такой подход позволяет роботу усваивать не только последовательность действий, но и тонкости, связанные с применением силы и ощущением контакта с объектами, что существенно повышает эффективность обучения и адаптации к различным задачам.
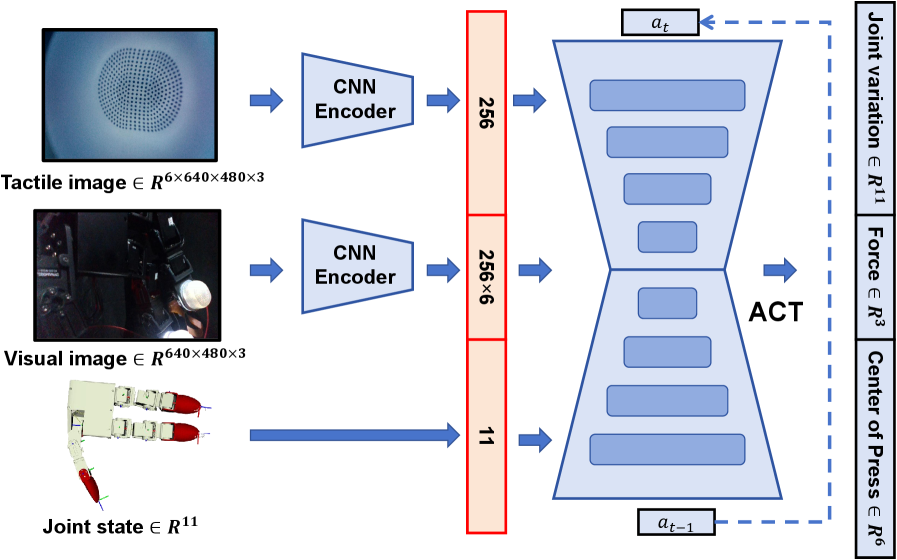
В основе DexTac лежит использование GelStereo BioTip Sensors — датчиков, обеспечивающих точное измерение силы и области контакта. Эти датчики, интегрированные в кончики пальцев манипулятора, позволяют получать детальную информацию о взаимодействии руки с объектами. Сбор данных осуществляется путем регистрации распределения силы по поверхности контакта, что позволяет алгоритмам обучения точно воспроизводить и адаптировать сложные манипуляции. Высокая точность измерений силы и области контакта критически важна для обучения политик, требующих деликатного взаимодействия с объектами и точного контроля над силой воздействия.
Контактно-чувствительные политики: гармония восприятия и действия
Для обучения политик, учитывающих контактное взаимодействие, используется фреймворк ACT (Adaptable Contact-aware Training). Этот фреймворк позволяет манипулятору, оснащенному ловкой рукой, адаптироваться к изменяющимся силам контакта и различным геометрическим формам объектов. Обучение происходит путем моделирования взаимодействия руки с объектами в различных условиях, что позволяет политике формировать стратегии для стабильного и точного захвата и манипулирования, независимо от внешних возмущений и особенностей формы объекта. Ключевым аспектом является способность политики к динамической адаптации, обеспечивающей устойчивость даже при неидеальном контакте или изменении геометрии объекта в процессе манипулирования.
Политики, обеспечивающие контактно-чувствительное управление, используют данные обратной связи по силе и координатам центра давления (CoP) для стабилизации и повышения точности манипуляций. Информация о силе, измеренная датчиками, позволяет оценить величину взаимодействия с объектом, а данные CoP, указывающие на точку приложения силы, позволяют определить распределение нагрузки и предотвратить нестабильность. Комбинированное использование этих данных позволяет системе адаптироваться к изменяющимся условиям контакта и поддерживать надежный захват и перемещение объектов различной формы и веса.
Для обеспечения комплексного понимания окружающей среды и конфигурации робота, фреймворк использует данные визуального восприятия и информацию о состоянии суставов. Визуальные данные, получаемые с камер, позволяют идентифицировать объекты, определять их положение и форму, а также оценивать расстояние до них. Одновременно, информация о состоянии суставов (углах и скоростях) предоставляет сведения о текущей позе и кинематике робота. Комбинирование этих двух источников данных позволяет фреймворку формировать точную и актуальную картину взаимодействия робота с окружающей средой, необходимую для планирования и выполнения манипуляций.
Адаптивное будущее: потенциал обобщения и расширения
Роботизированная система DexTac продемонстрировала выдающиеся возможности переноса обучения без дополнительной тренировки, что открывает новые перспективы в области адаптивной робототехники. В ходе экспериментов, манипулятор успешно выполнял ранее не встречавшиеся задачи, такие как работа с различными объектами и выполнение сложных манипуляций, не требуя предварительной адаптации или перенастройки. Это стало возможным благодаря способности системы обобщать полученные знания и применять их к новым ситуациям, что значительно повышает её гибкость и универсальность. Такой подход позволяет создавать роботов, способных быстро адаптироваться к меняющимся условиям и выполнять широкий спектр задач без необходимости постоянного программирования и обучения, что является ключевым шагом к созданию действительно автономных и интеллектуальных роботизированных систем.
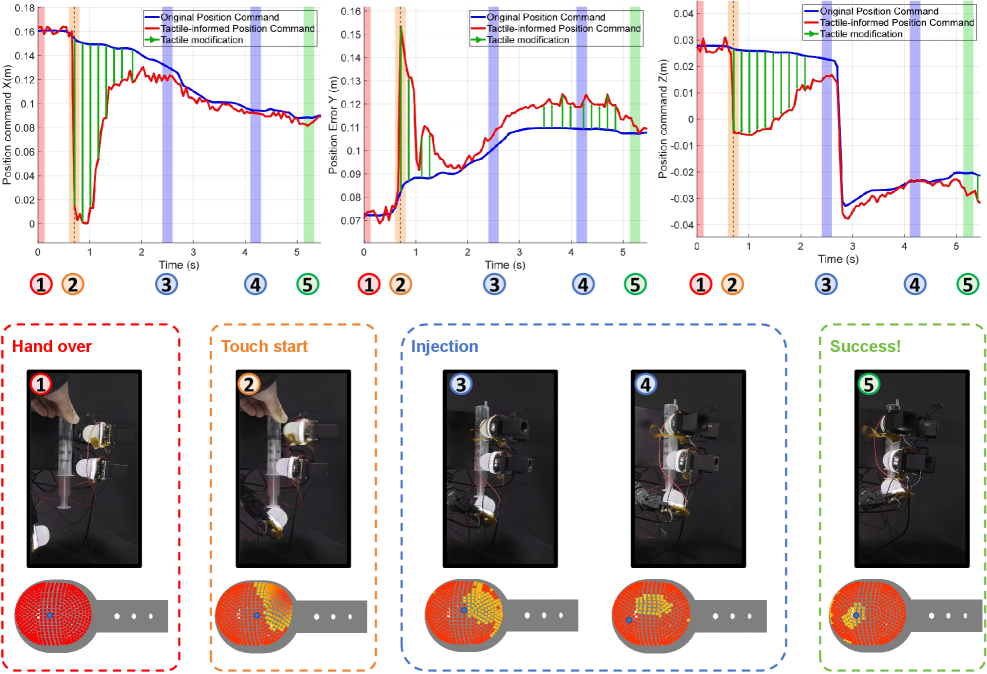
Интеграция тактильного контроллера позволяет существенно повысить надежность и точность движений робота-манипулятора. Вместо полагания исключительно на визуальные данные или предварительно запрограммированные траектории, система DexTac использует информацию, полученную от тактильных сенсоров, для динамической корректировки действий. Этот подход позволяет роботу адаптироваться к незначительным отклонениям в положении объекта, вариациям в его жесткости или неожиданным препятствиям. В результате, манипуляции становятся более устойчивыми к внешним воздействиям и погрешностям, а точность выполнения задач — значительно выше, что особенно важно в деликатных операциях, требующих аккуратности и чувствительности.
Исследования показали, что система DexTac достигла средней успешности в 91.67% при выполнении деликатной задачи — нажатия на шприц, требующей высокой точности и контроля. Этот показатель значительно превосходит результаты, полученные с использованием традиционных методов, основанных исключительно на контроле силы, где успешность составляла лишь 60%. Полученное улучшение в 31.67% демонстрирует существенный прогресс в области адаптивной робототехники и подтверждает эффективность использования тактильной обратной связи для повышения надежности и точности манипуляций, особенно в задачах, требующих аккуратного взаимодействия с объектами.
Исследование продемонстрировало впечатляющую способность системы DexTac к обобщению, что подтверждается успешным выполнением манипуляций с 20-миллилитровым шприцем без дополнительного обучения. Достигнутый показатель успеха в 65% при переносе навыков на новый объект, не встречавшийся ранее, свидетельствует о высокой адаптивности и потенциале системы для решения широкого спектра задач, связанных с точными манипуляциями. Этот результат подчеркивает, что DexTac не просто запоминает конкретные действия, а формирует более общее представление о принципах манипулирования, позволяя эффективно применять полученные навыки в новых, незнакомых ситуациях, что крайне важно для практического применения робототехники в реальном мире.
Представленная работа демонстрирует эволюцию систем манипулирования, где ключевым аспектом является адаптация к изменяющимся условиям контакта. Подобно тому, как система со временем обретает зрелость через последовательность инцидентов и исправлений, так и DexTac учится выбирать оптимальные точки контакта, интегрируя данные о силе и положении. Дональд Дэвис однажды заметил: «Любая система стареет — вопрос лишь в том, делает ли она это достойно». Этот принцип особенно актуален для DexTac, поскольку система не просто выполняет задачу, но и совершенствует свои навыки, адаптируясь к тонкостям взаимодействия с объектами и извлекая уроки из каждого касания. Успех в задачах, требующих высокой точности, таких как нажатие на шприц, свидетельствует о способности системы к изящному старению, то есть к непрерывному совершенствованию и адаптации.
Куда же дальше?
Представленная работа, безусловно, демонстрирует прогресс в обучении манипуляций, но стоит признать: искусная рука, хоть и наученная “из рук в руки”, все еще остается лишь сложной машиной, а не частью непрерывного цикла. Интеграция данных о силе и области контакта — шаг верный, однако истинное понимание тактильного взаимодействия требует не просто регистрации “Центра Давления”, а осознания его динамики во времени, его “истории”. Технический долг, как эрозия, неизбежен в любой сложной системе, и задача заключается не в его полном устранении, а в предвидении и смягчении последствий.
Очевидным направлением дальнейших исследований является расширение контекста обучения. Рука, действующая в вакууме, — лишь половина уравнения. Необходимо учитывать не только физические свойства объекта, но и непредсказуемость окружающей среды, ее “шум”, который неизбежно вносит коррективы в любой план. Долговременная адаптация, способность к обучению “на лету” — вот что действительно приблизит искусственные системы к гибкости и устойчивости живых организмов.
Аптайм, редкая фаза гармонии во времени, не может быть самоцелью. Важнее — способность восстанавливаться после сбоев, учиться на ошибках и эволюционировать. В конечном итоге, успех не измеряется процентом успешно выполненных задач, а способностью системы поддерживать свое существование в постоянно меняющемся мире — и делать это достойно.
Оригинал статьи: https://arxiv.org/pdf/2601.21474.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Как сбросить приложение безопасности Windows, чтобы устранить проблемы в Windows 11 и 10
- vivo iQOO Z10x ОБЗОР: яркий экран, удобный сенсор отпечатков, объёмный накопитель
- Шоппинг в Гонконге. Где купить iPhone и iPad.
- Простые советы, чтобы немедленно улучшить ваши фотографии.
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- Nothing Phone (4a) Pro ОБЗОР: большой аккумулятор, скоростная зарядка, замедленная съёмка видео
- Нефть вниз, инфляция под контролем: что ждет российский рынок в апреле? (14.03.2026 04:32)
- Виртуальные прогулки учат роботов ориентироваться
- Motorola Moto G67 Power ОБЗОР: яркий экран, плавный интерфейс, удобный сенсор отпечатков
- Лучшие смартфоны. Что купить в марте 2026.
2026-01-31 21:58