Автор: Денис Аветисян
Исследователи представили метод, позволяющий роботам надежно захватывать и использовать различные инструменты, опираясь на сочетание визуальной информации и тактильных ощущений.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"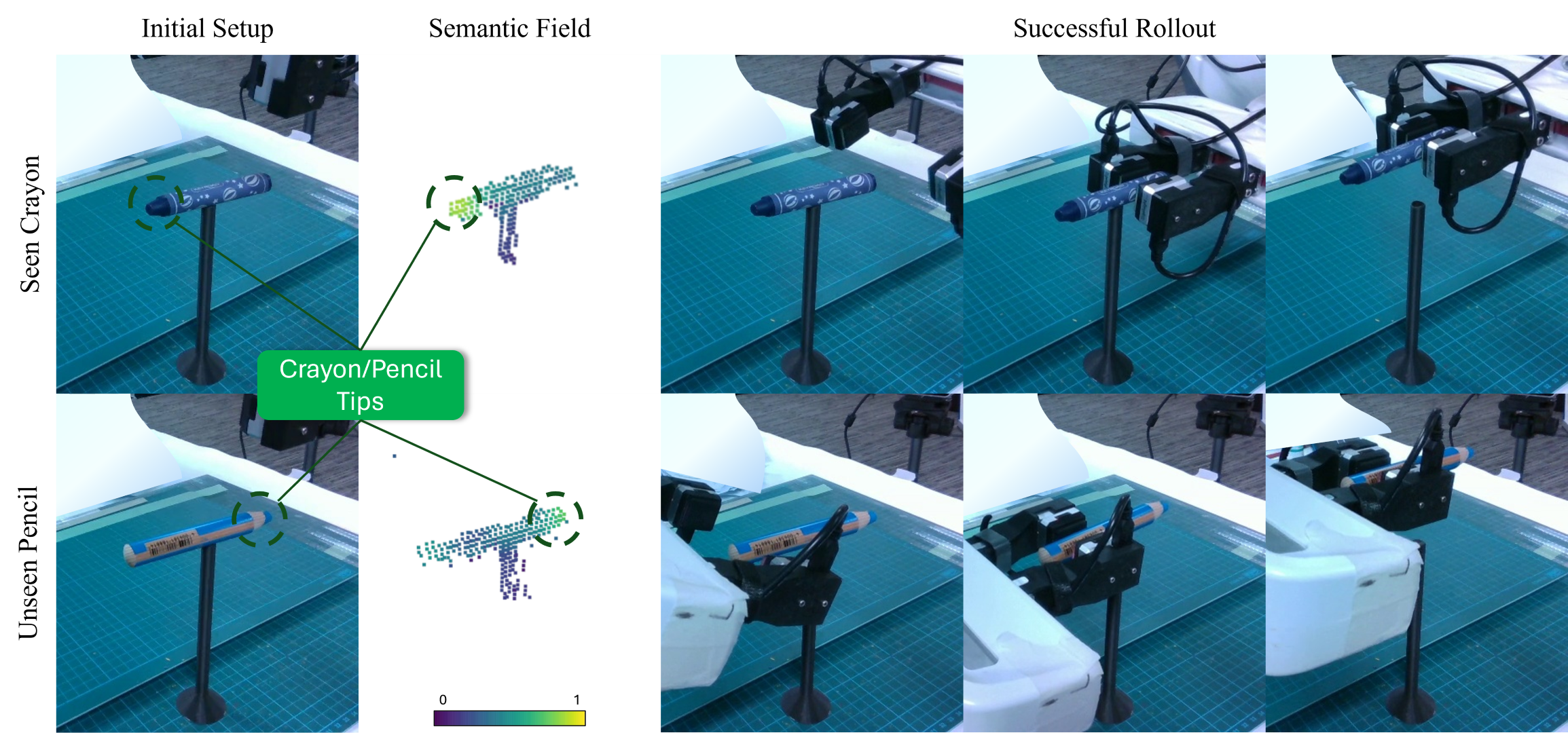
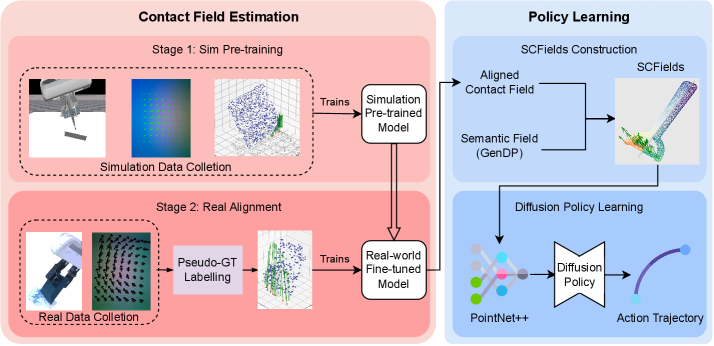
В статье описывается Semantic-Contact Fields — 3D-представление, объединяющее семантическое понимание окружения с плотными оценками контакта, обеспечивающее обобщенное манипулирование инструментами роботами в симуляции и реальном мире.
Обобщение навыков манипулирования инструментами роботами требует как семантического планирования, так и точного физического контроля, однако существующие подходы часто страдают от недостаточной физической детализации или низкой способности к обобщению. В данной работе, посвященной разработке ‘Semantic-Contact Fields for Category-Level Generalizable Tactile Tool Manipulation’, предложен новый подход, объединяющий визуальную семантику с плотными оценками контакта для создания унифицированного 3D-представления. Ключевым результатом является создание Semantic-Contact Fields (SCFields) и соответствующего конвейера обучения Sim-to-Real, позволяющего достичь обобщения при манипулировании различными инструментами. Сможет ли предложенный подход открыть новые горизонты в области тактильного управления роботами и обеспечить более надежное и универсальное взаимодействие с окружающим миром?
Преодолевая Разрыв Между Симуляцией и Реальностью в Роботизированном Манипулировании
Традиционные подходы к использованию инструментов роботами часто сталкиваются с проблемой обобщения: системы, демонстрирующие высокую эффективность в симуляции, существенно теряют свои возможности в реальном мире. Это несоответствие, известное как “разрыв между симуляцией и реальностью”, обусловлено рядом факторов, включая неточности в моделях физики, различия в сенсорных данных и непредсказуемость реальной среды. Роботы, обученные в контролируемых виртуальных условиях, испытывают трудности при взаимодействии с неидеальными объектами, неровными поверхностями и неожиданными препятствиями, что ограничивает их применимость в практических задачах, требующих адаптивности и надежности. Преодоление этого разрыва является ключевой задачей для создания действительно универсальных и полезных роботов-манипуляторов.
Современные робототехнические системы, полагающиеся исключительно на визуальное или тактильное восприятие, часто демонстрируют недостаточную устойчивость при выполнении сложных манипуляций, требующих постоянного контакта с объектами. В реальных условиях, где объекты обладают разнообразными формами, текстурами и непредсказуемыми свойствами, простое определение формы или силы давления оказывается недостаточным для надежного удержания и управления инструментом. Недостаток понимания динамики контакта и способности адаптироваться к непредвиденным изменениям в силах взаимодействия приводит к ошибкам и сбоям, особенно при выполнении задач, требующих высокой точности и деликатности. Успешное выполнение таких задач требует интеграции различных сенсорных модальностей и разработки алгоритмов, способных эффективно обрабатывать и интерпретировать полученную информацию, а также предсказывать поведение объектов при контакте.
Для достижения подлинной категорийной обобщенности — способности робота эффективно использовать разнообразные инструменты в рамках одной категории — необходимо углубленное понимание динамики контакта и функциональных возможностей этих инструментов. Исследования показывают, что простая имитация действий, основанная лишь на визуальной информации, недостаточна для успешного манипулирования в реальном мире. Роботы должны не просто видеть инструмент, но и понимать, как его форма и свойства позволяют решать определенные задачи, учитывая физические взаимодействия с объектами. Изучение принципов контактной динамики, включая силы, моменты и трение, позволяет создавать алгоритмы, способные адаптироваться к различным условиям и выполнять сложные манипуляции, например, закручивать винты разного размера или резать материалы разной плотности. Понимание функциональных возможностей, или «аффордансов», позволяет роботу определить, какие действия возможны с данным инструментом и как лучше всего их реализовать для достижения желаемого результата, что приближает роботов к уровню гибкости и адаптивности, присущей человеку.
Семантические и Контактные Поля: Объединяя Знания для Надежного Манипулирования
Представляем Semantic-Contact Fields (SCFields) — трехмерное представление, которое объединяет семантические признаки с плотными оценками контакта для формирования более полного понимания окружающей среды робота. SCFields кодируют информацию о геометрии объектов, их материалах и функциональном назначении, а также данные о точках контакта между роботом и окружением. Такое объединение позволяет не только идентифицировать объекты, но и прогнозировать их взаимодействие с манипулятором, что необходимо для надежного и эффективного управления.
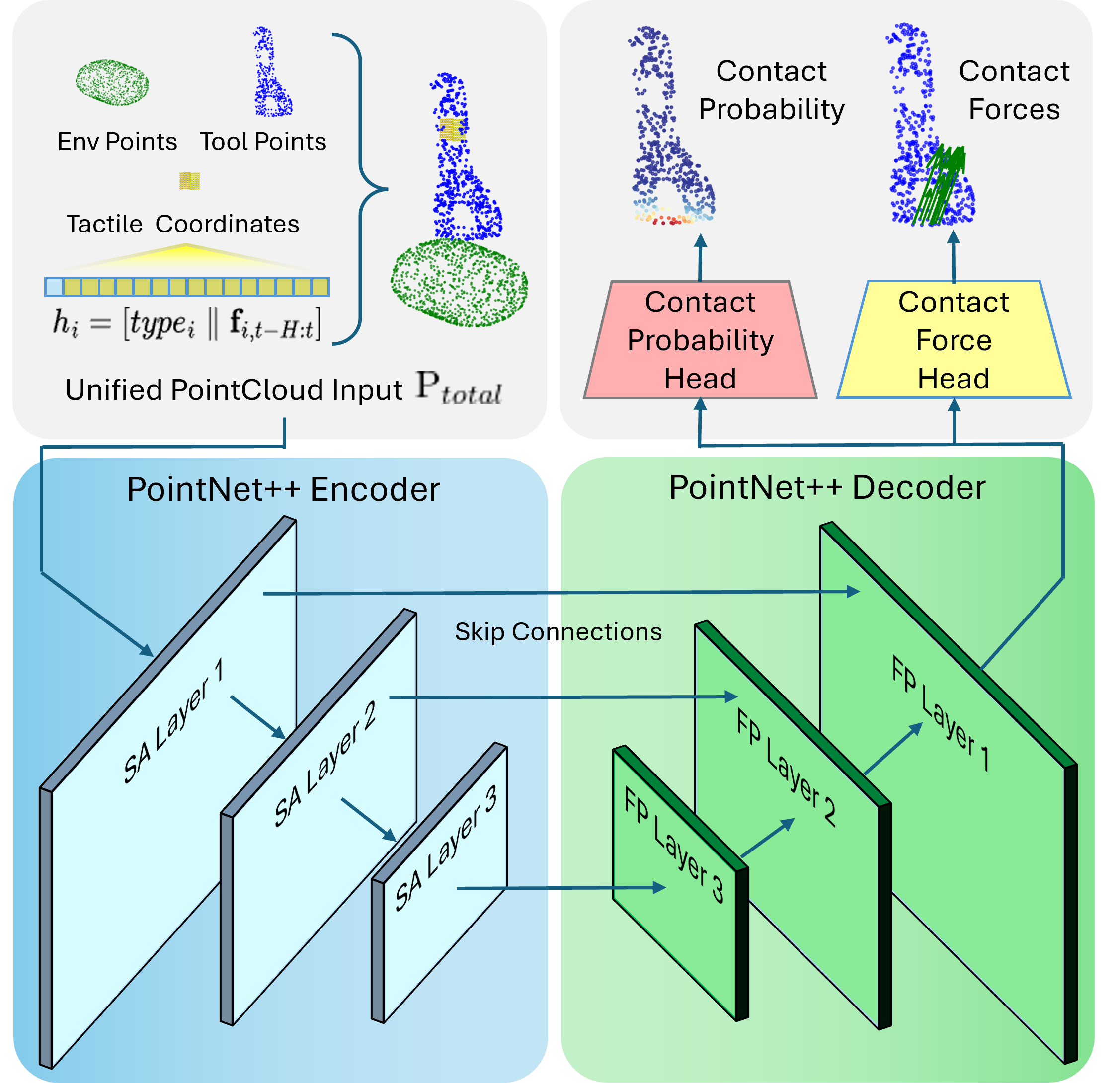
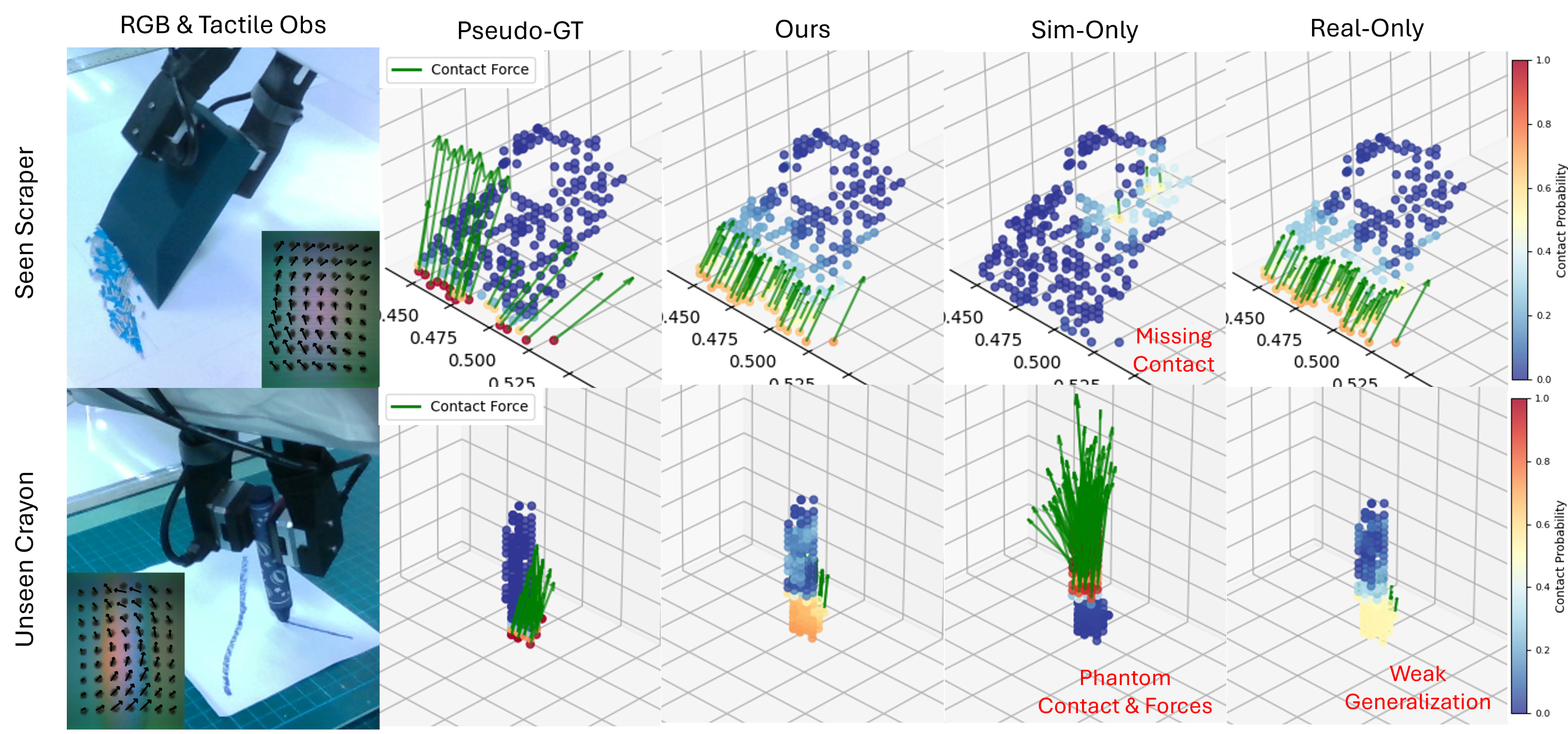
Для извлечения признаков в Semantic-Contact Fields (SCFields) используется архитектура PointNet++. Этот выбор обусловлен способностью PointNet++ эффективно обрабатывать облака точек, представляющие 3D-геометрию объектов и сцен. Обучение SCFields осуществляется в рамках комплексного подхода Sim-to-Real, который предполагает перенос знаний, полученных в симуляции, в реальный мир. Такой подход включает в себя использование синтетических данных для предварительного обучения модели, а затем тонкую настройку на реальных данных. Это позволяет значительно сократить разрыв в производительности между симуляцией и реальным миром, обеспечивая более надежное и эффективное манипулирование объектами в реальных условиях.
Успех SCFields обусловлен использованием специализированных функций потерь, оптимизирующих точность оценки контактов и обеспечивающих устойчивое обучение. В частности, Focal Loss минимизирует дисбаланс классов при оценке вероятности контакта, сосредотачиваясь на сложных для классификации точках. Mean Squared Error (MSE) применяется для регрессии плотности контактов, обеспечивая высокую точность предсказания силы взаимодействия. Cosine Similarity используется для согласования семантических признаков с оценками контактов, что позволяет модели лучше понимать взаимосвязь между объектами и их физическим взаимодействием. Комбинация этих функций потерь позволяет SCFields эффективно обучаться и обобщать данные, обеспечивая надежную работу в различных условиях.
Валидация на Различных Задачах Манипулирования
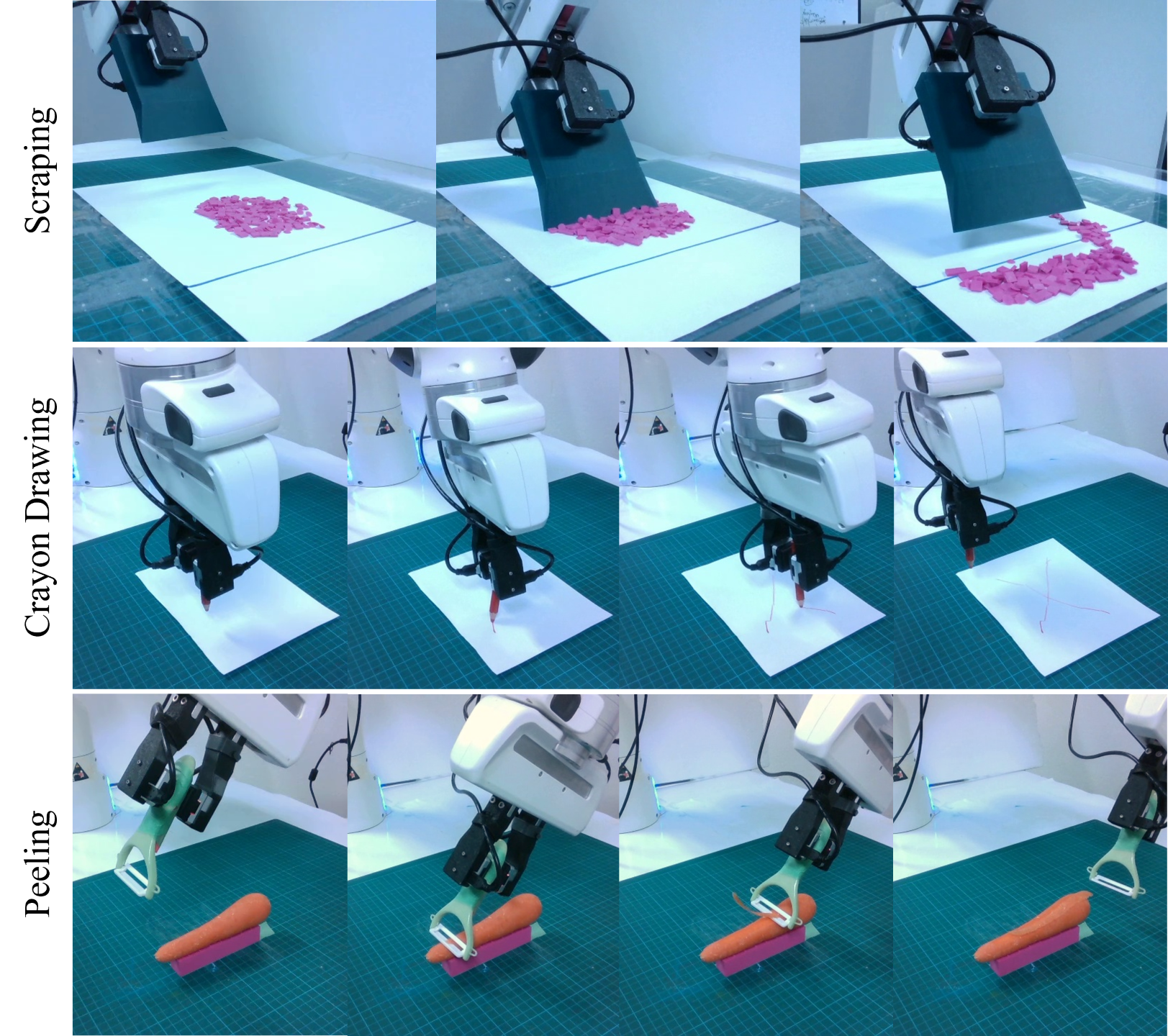
В рамках всесторонней оценки SCFields использовался роботизированный комплекс Franka Panda, оснащенный тактильными датчиками Gelsight Mini. Проводились испытания в задачах манипулирования, включающих соскабливание, рисование восковыми мелками и очистку от кожуры. Выбор этих задач обусловлен их сложностью и необходимостью точного контроля, позволяющими оценить возможности SCFields в различных сценариях взаимодействия с объектами. Использование роботизированной платформы и тактильных датчиков обеспечило объективность и воспроизводимость результатов оценки.
В ходе экспериментов SCFields продемонстрировал существенное превосходство над существующими методами, такими как GenDP, особенно в задачах, требующих интенсивного тактильного взаимодействия. В частности, в задаче отслаивания, SCFields достиг средней длины отслаивания 4.52 см, что в четыре раза превышает результат Vision-Only базовой модели, составивший 1.12 см. Данный показатель свидетельствует о значительном улучшении производительности в сценариях, где важен точный контроль и обратная связь с окружающей средой.
Эффективность предложенного фреймворка подтверждается способностью к обобщению на различные варианты инструментов внутри одной категории, демонстрируя категорийное обобщение. В ходе экспериментов было показано, что модель успешно применяет полученные знания к инструментам, незначительно отличающимся по форме и размеру, сохраняя при этом высокую производительность. Данная особенность позволяет избежать необходимости переобучения модели для каждого нового варианта инструмента, что существенно снижает затраты на адаптацию и расширение функциональности системы манипулирования.
К Универсальному и Интеллектуальному Использованию Инструментов
В области робототехники, способность манипулировать инструментами зачастую ограничивается лишь распознаванием объектов взаимодействия, упуская из виду понимание способа этого взаимодействия. Разработанные SCFields представляют собой принципиально новый подход, объединяющий семантическую информацию — то есть, что представляет собой объект — с информацией о контакте — о том, как именно происходит физическое взаимодействие. Такое слияние позволяет роботам не просто идентифицировать инструмент и цель, но и понимать, каким образом необходимо воздействовать, чтобы успешно выполнить задачу. Это преодоление ключевого ограничения открывает возможности для создания роботов, способных адаптироваться к различным условиям и взаимодействовать с миром более интуитивно и эффективно, переходя от простого распознавания к полноценному пониманию.
Политика диффузии, обученная на основе SCFields, открывает новые возможности для надежной манипуляции инструментами роботами. В отличие от традиционных подходов, требующих четко определенных сценариев, данная методика позволяет роботу адаптироваться к непредвиденным обстоятельствам и поддерживать стабильное взаимодействие с окружающей средой. Благодаря способности прогнозировать оптимальные действия на основе анализа семантической и контактной информации, робот способен корректировать свои движения в реальном времени, преодолевая препятствия и обеспечивая успешное выполнение задачи даже при возникновении неожиданных помех или изменений в обстановке. Этот механизм позволяет достичь высокой степени устойчивости и гибкости, что критически важно для широкого спектра применений, где требуется надежное и адаптивное взаимодействие с инструментами.
Разработанные методы обладают широким спектром потенциальных применений, простирающимся от автоматизации промышленных процессов до робототехники, призванной помогать людям. В частности, в сфере промышленного производства, данная технология позволит роботам более эффективно и надежно выполнять сложные задачи, адаптируясь к изменяющимся условиям и минимизируя необходимость в ручной корректировке. В области ассистивной робототехники, это открывает возможности для создания более чутких и функциональных устройств, способных оказывать поддержку в повседневной жизни людям с ограниченными возможностями, выполняя задачи, требующие точности и адаптивности. В конечном итоге, данное исследование способствует развитию более интеллектуальных и универсальных роботизированных систем, способных к гибкому взаимодействию с окружающим миром и решению разнообразных задач.
Представленная работа демонстрирует подход к манипулированию инструментами, основанный на семантических контактных полях, что позволяет роботам адаптироваться к различным инструментам и окружениям. Этот метод, объединяющий визуальные данные и плотные оценки контакта, напоминает о сложности систем и их непредсказуемости. Как однажды заметил Андрей Колмогоров: «Математика — это искусство находить закономерности в хаосе». Подобно этому, семантические контактные поля стремятся выявить закономерности в кажущемся хаосе взаимодействия робота с объектами, создавая не жесткую структуру, а скорее, экосистему, способную к эволюции и адаптации. Подход, описанный в статье, не просто предоставляет решение, а предлагает способ откладывать хаос, позволяя роботу успешно функционировать в сложных и непредсказуемых условиях.
Что дальше?
Представленные Семантические Поля Контакта, несомненно, расширяют горизонты манипулирования инструментами роботами. Однако, за кажущейся универсальностью скрывается неизбежный компромисс. Каждая попытка формализации тактильного взаимодействия — это предсказание будущей неудачи, заранее определяющее границы применимости системы. Идеальная система, способная к манипулированию любым инструментом в любой среде, лишена места для человеческой интуиции и адаптации — она попросту мертва.
Настоящая проблема заключается не в достижении идеальной генерализации, а в создании систем, способных к контролируемому сбою. Не в устранении неопределенности, а в её использовании как источника обучения. Следующий этап развития, вероятно, потребует отхода от стремления к абсолютной точности в оценке контактов, и перехода к моделям, способным к самовосстановлению и импровизации. Система, которая ломается — жива.
Важно понимать, что Семантические Поля Контакта — это лишь один из возможных путей. В конечном счете, успех не будет определяться степенью точности представления, а способностью системы признать собственную неполноту и принять неизбежность ошибки. Стремление к совершенству — это ловушка, ведущая к стагнации.
Оригинал статьи: https://arxiv.org/pdf/2602.13833.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Нейросети как посредники: этика и границы взаимодействия с разумом
- Oppo Find X9 Ultra ОБЗОР: большой аккумулятор, скоростная зарядка, чёткое изображение
- Российская экономика: замедление, дивиденды и ожидания снижения ставки ЦБ (02.04.2026 00:32)
- Российский рынок: Рубль, Нефть и Корпоративные Истории – Что Ждет Инвесторов? (02.04.2026 23:32)
- Неважно, на что вы фотографируете!
- vivo iQOO Z11 Turbo ОБЗОР: огромный накопитель, отличная камера, много памяти
- Калькулятор глубины резкости. Как рассчитать ГРИП.
- Российский рынок: От прибыли «Россетей» до геополитики и перспектив ретейла (31.03.2026 18:32)
- Обзор объектива Fujinon XF60mm F2.4 R Macro
- Infinix Note 40 Pro+ выставлен на обзор
2026-02-17 16:13