Автор: Денис Аветисян
Исследователи разработали метод создания реалистичных тактильных ощущений в воздухе, используя ультразвук для стимуляции механорецепторов кожи.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"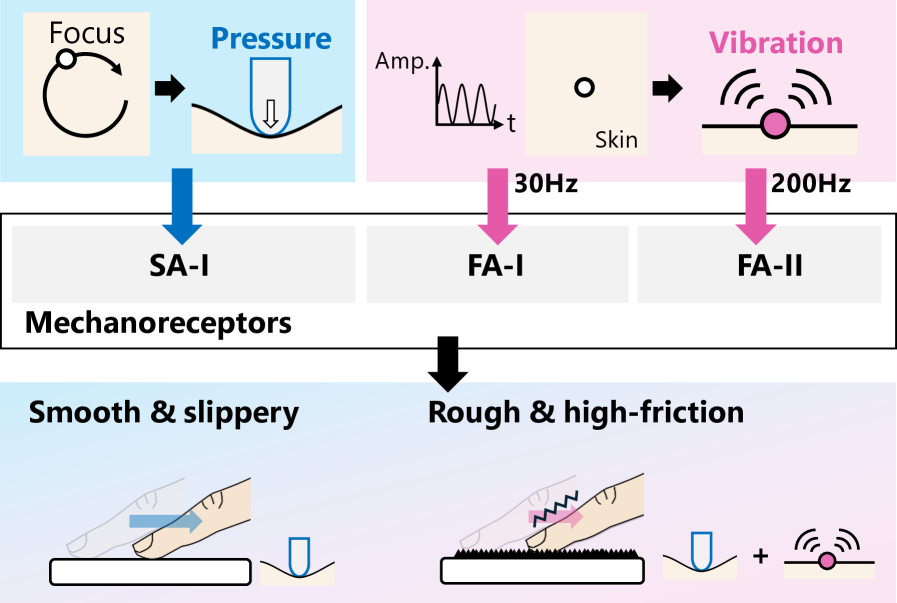
В статье представлен способ синтеза тактильных текстур в ультразвуковой тактильной обратной связи, основанный на комбинировании статического давления и вибрации различных частот.
Восприятие тактильных ощущений традиционно требует физического контакта с объектом, что ограничивает возможности неконтактных интерфейсов. В работе, посвященной ‘Tactile Rendering Using Three Basic Stimulus Components in Ultrasound Midair Haptics’, предложен метод создания тактильных ощущений в воздухе с использованием ультразвука, основанный на стимуляции трех типов механорецепторов. Показано, что комбинируя статическое давление и вибрации различной частоты, можно синтезировать разнообразные текстуры, воспринимаемые как шероховатые или гладкие. Возможно ли с помощью данного подхода создать реалистичные тактильные ощущения, неотличимые от прикосновения к реальным объектам, и расширить сферу применения неконтактных интерфейсов?
За пределами контакта: Ограничения традиционной тактильной обратной связи
Современные тактильные дисплеи, основанные на физическом контакте с пользователем, зачастую существенно ограничивают свободу движений и, как следствие, снижают степень погружения в виртуальную реальность. Эти системы, полагающиеся на механическое воздействие, не позволяют в полной мере воспроизвести естественные ощущения, возникающие при взаимодействии с реальными объектами. Ограниченность подвижности устройства и пользователя создает эффект “привязанности”, мешая достижению иллюзии присутствия и реалистичного тактильного восприятия. В результате, даже самые передовые контактные дисплеи не могут обеспечить полноценный опыт взаимодействия, необходимый для высококачественной симуляции и виртуальной реальности, поскольку нарушают естественную свободу тактильного исследования.
Существующие тактильные дисплеи, основанные на физическом контакте, часто сталкиваются с трудностями при достоверной передаче сложных текстур и тонких ощущений. Это связано с тем, что воспроизведение всего спектра тактильных восприятий, присущих реальному миру, требует не просто активации точек контакта, но и имитации вариаций давления, температуры и микроскопических движений поверхности. Попытки упростить эти ощущения для реализации в технологиях неизбежно приводят к потере детализации и, как следствие, к снижению степени реалистичности. В частности, воссоздание таких ощущений, как шелковистость, шершавость или текстура кожи, требует гораздо более сложных механизмов, чем простое вибрационное воздействие или изменение силы давления, что представляет собой значительную инженерную задачу.
Воссоздание естественной сложности тактильного восприятия без физических ограничений представляет собой серьезную задачу для современных технологий. Человеческая кожа обладает удивительной способностью воспринимать не только давление, но и текстуру, температуру, вибрацию и даже скорость скольжения — всё это одновременно. Традиционные тактильные дисплеи, полагающиеся на физический контакт, часто не способны передать эту многогранность ощущений, упрощая реальность до примитивных сигналов. Исследователи стремятся разработать системы, использующие, например, ультразвуковые волны или электротактильную стимуляцию, чтобы обмануть нервные окончания и создать иллюзию прикосновения без непосредственного контакта, что открывает перспективы для создания более реалистичных и иммерсивных виртуальных сред, а также для помощи людям с ограниченными возможностями.
Ультразвуковая тактильная обратная связь в воздухе: Новый подход
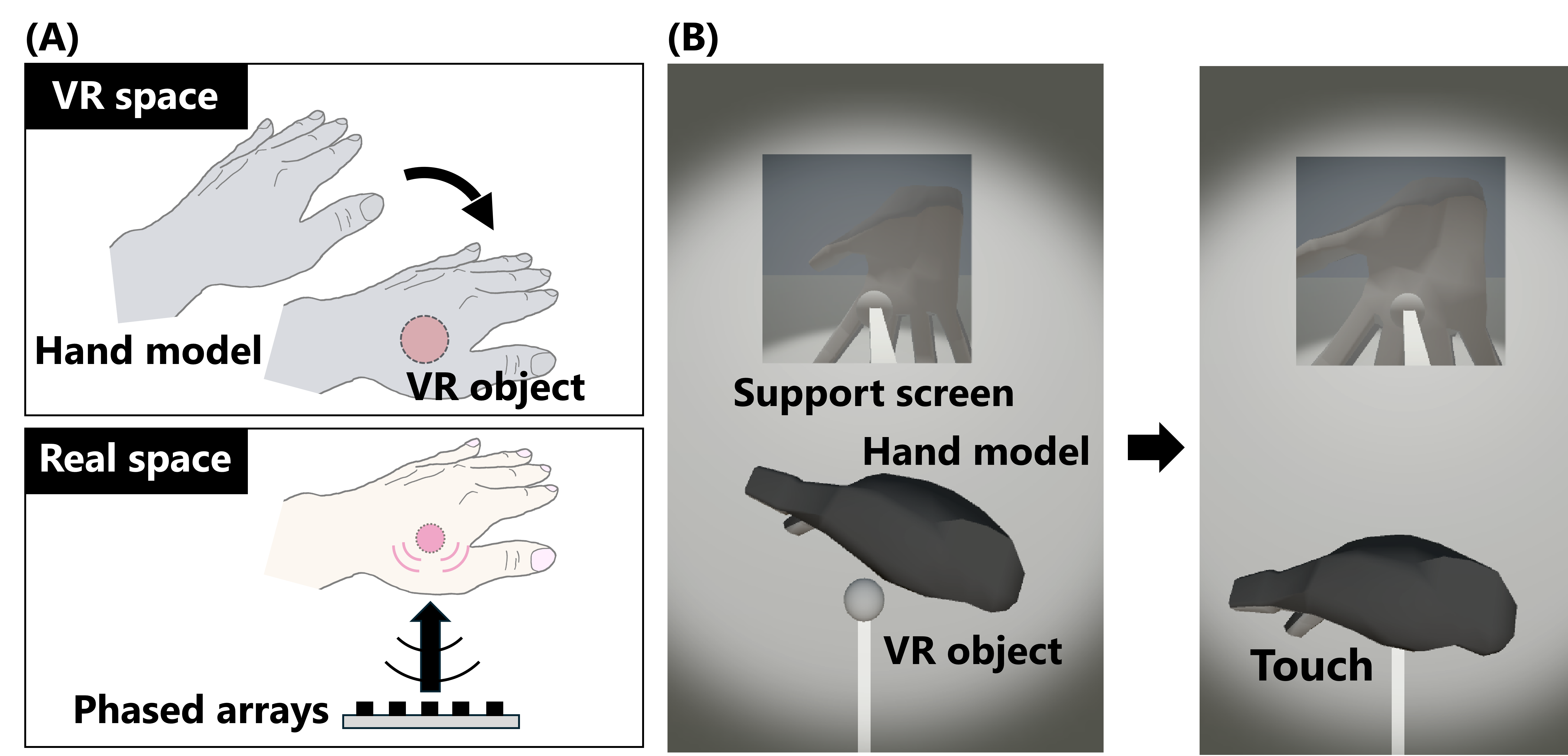
Ультразвуковая тактильная обратная связь в воздухе представляет собой перспективное решение, использующее сфокусированный ультразвук для создания тактильных ощущений без физического контакта с пользователем. Данная технология позволяет формировать локализованные области давления на коже, не требуя использования механических устройств или прикосновений. Принцип действия основан на генерации ультразвуковых волн, которые, фокусируясь в определенной точке пространства, создают силу, воздействующую на кожу и активирующую тактильные рецепторы. Это обеспечивает возможность передачи тактильной информации и создания иллюзии прикосновения в воздухе, открывая новые возможности для взаимодействия человека с цифровыми интерфейсами и виртуальной реальностью.
Тактильные ощущения в технологии ультразвуковой левитации достигаются за счет использования силы акустического излучения (Акустической Силы Излучения — АСИ). АСИ представляет собой силу, возникающую в результате градиента звукового давления, и направлена на небольшие объекты, включая кожные рецепторы. В отличие от традиционных методов, требующих физического контакта, АСИ позволяет дистанционно стимулировать механорецепторы кожи, создавая ощущение прикосновения без непосредственного контакта с поверхностью. Интенсивность и частота ультразвука контролируются для точной модуляции силы, воздействующей на рецепторы, обеспечивая возможность создания различных тактильных ощущений.
Манипулирование ультразвуком открывает возможности для создания широкого спектра тактильных ощущений за счет точного контроля параметров ультразвукового излучения. Изменяя частоту, амплитуду и фазу ультразвуковых волн, а также фокусируя их в определенные точки пространства, можно стимулировать различные типы кожных рецепторов, отвечающих за восприятие давления, вибрации и текстуры. Это позволяет формировать ощущение контакта с виртуальными объектами, передавать информацию через тактильные сигналы и создавать сложные тактильные паттерны, не требующие физического прикосновения. Возможности включают имитацию текстур различной шероховатости, передачу формы и контура объектов, а также создание ощущения давления и упругости.
Расшифровка тактильного восприятия: Роль механорецепторов
Тактильное восприятие обеспечивается активацией различных механорецепторов, расположенных в коже. Среди ключевых типов выделяют SA-I рецепторы, реагирующие на статическое давление, а также FA-I и FA-II рецепторы, отвечающие за восприятие вибраций. SA-I рецепторы характеризуются медной адаптацией и обеспечивают информацию о постоянном контакте. FA-I рецепторы обладают быстрой адаптацией и реагируют на низкочастотные вибрации, в то время как FA-II рецепторы также быстро адаптируются, но более чувствительны к высокочастотным вибрациям. Разнообразие этих рецепторов и их специфические характеристики позволяют коже воспринимать широкий спектр тактильных стимулов.
Механорецепторы кожи различаются по своей реакции на стимулы. Рецепторы SA-I специализируются на восприятии постоянного давления, обеспечивая информацию о статичных объектах, контактирующих с кожей. В то время как SA-I реагируют на устойчивое давление, рецепторы FA-I и FA-II отвечают на вибрации. Рецепторы FA-I наиболее чувствительны к вибрациям низкой частоты, примерно 30 Гц, а FA-II активируются вибрациями более высокой частоты, около 150 Гц. Эта дифференциация в частотной чувствительности позволяет нервной системе различать различные текстуры и динамические характеристики объектов, с которыми контактирует кожа.
Точное стимулирование механорецепторов кожи — SA-I, FA-I и FA-II — позволяет формировать широкий спектр тактильных ощущений. Рецепторы SA-I, реагирующие на статическое давление, обеспечивают восприятие постоянных контактов. Рецепторы FA-I и FA-II, активируемые вибрациями с частотой около 30 Гц и 150 Гц соответственно, отвечают за восприятие динамических текстур и быстро меняющихся контактов. Комбинируя различные уровни и частоты стимуляции этих рецепторов, нервная система способна создавать сложные тактильные образы, от ощущения давления до распознавания шероховатости поверхности.
Синтез текстуры: Мультирецепторный подход
Метод рендеринга текстур, разработанный нами, позволяет синтезировать тактильные ощущения путем комбинированной стимуляции механорецепторов SA-I, FA-I и FA-II посредством сфокусированного ультразвука. Стимуляция этих трех типов рецепторов позволяет воссоздать широкий спектр тактильных ощущений, поскольку SA-I отвечают за восприятие статического давления и формы объектов, FA-I — за низкочастотные вибрации, воспринимаемые как грубые текстуры, а FA-II — за высокочастотные вибрации, отвечающие за восприятие мелких деталей и гладкости поверхности. Комбинируя интенсивность и частоту ультразвукового воздействия на каждый тип рецептора, возможно создание сложных тактильных ощущений, имитирующих различные материалы и текстуры.
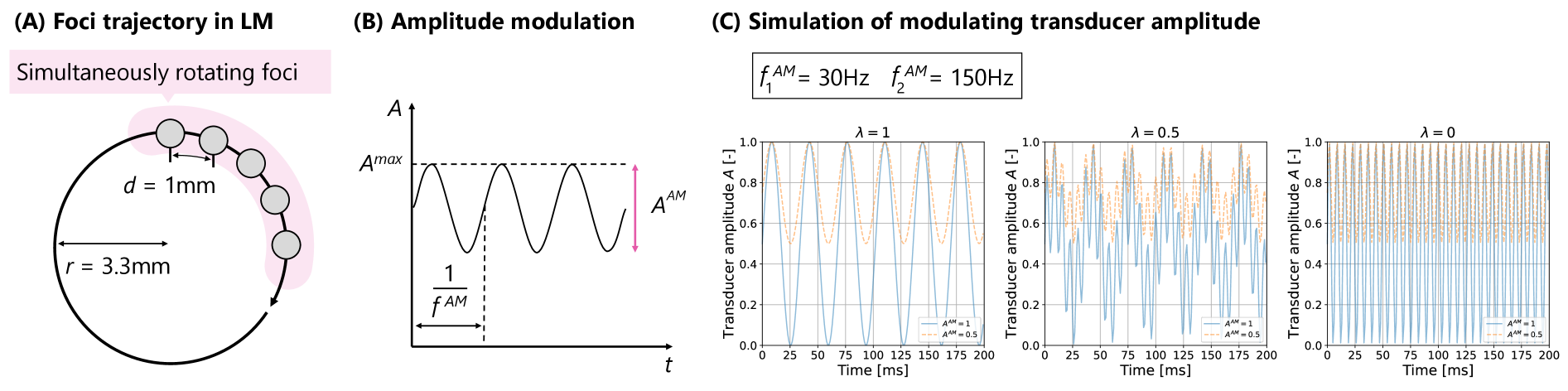
Регулирование интенсивности ультразвукового воздействия достигается посредством амплитудной модуляции. Этот метод позволяет точно настраивать стимуляцию каждого типа рецепторов — SA-I, FA-I и FA-II — путем изменения амплитуды ультразвуковых волн. Различные амплитуды соответствуют различным уровням активации рецепторов, что обеспечивает возможность синтеза сложных тактильных ощущений. Контроль амплитуды является критически важным для обеспечения различимости и точности передаваемых текстурных характеристик, поскольку позволяет избежать нежелательной перегрузки или недостаточной стимуляции отдельных рецепторов.
Для синтеза тактильных ощущений, метод использует различные частоты фокусировки ультразвука для стимуляции отдельных рецепторов. Статическое давление, воспринимаемое рецепторами SA-I, достигается за счет вращения фокуса ультразвука с частотой 5 Гц. Рецепторы FA-I, отвечающие за низкочастотные вибрации, стимулируются вибрацией с частотой 30 Гц. Для стимуляции рецепторов FA-II, воспринимающих высокочастотные вибрации, используется вибрация с частотой 150 Гц. Комбинация этих частот позволяет создавать комплексные тактильные ощущения, имитирующие различные текстуры.
Восприятие и валидация: Измерение тактильного реализма
Для оценки эффективности разработанного метода рендеринга текстур был использован визуальный аналоговый масштаб, позволивший количественно оценить восприятие шероховатости и трения. Данный инструмент позволил участникам эксперимента оценить интенсивность ощущаемых тактильных характеристик, предоставив метрику для измерения реалистичности передаваемого тактильного опыта. Метод позволил получить субъективные данные о том, как различные текстуры воспринимаются пользователем, что является важным шагом в создании более правдоподобных и убедительных тактильных ощущений в виртуальной среде. Использование визуального аналогового масштаба обеспечило возможность точного измерения и сравнения тактильных ощущений, что критически важно для оптимизации и улучшения качества рендеринга текстур.
Для количественной оценки реалистичности тактильных ощущений использовалась визуальная аналоговая шкала, позволяющая испытуемым оценивать интенсивность воспринимаемых раздражителей. Этот субъективный метод предоставляет возможность измерить степень реалистичности тактильных ощущений, преобразуя восприятие в числовые значения. Оценивая интенсивность шероховатости и трения по шкале, можно получить объективную метрику, отражающую, насколько убедительно система воспроизводит тактильные свойства поверхности. Данный подход обеспечивает ценный инструмент для разработки и оптимизации технологий, направленных на создание более реалистичных и захватывающих тактильных взаимодействий, поскольку позволяет напрямую соотносить физические параметры стимуляции с субъективным опытом пользователя.
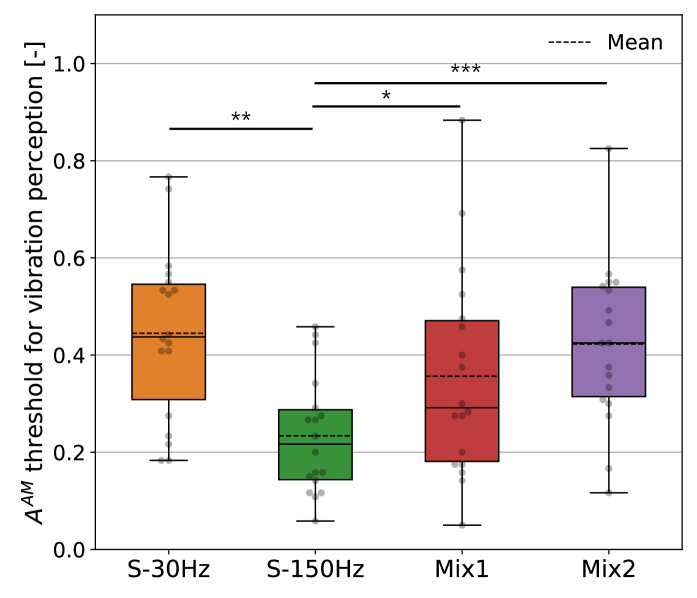
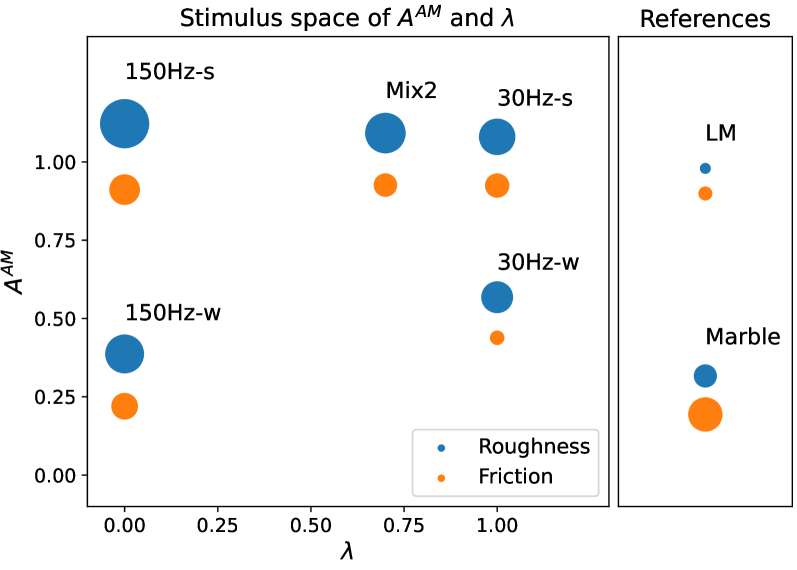
Исследования выявили, что порог восприятия вибрации составил 0,23, что является минимальным значением, зафиксированным для стимула S-150Гц. Статистический анализ продемонстрировал значительное влияние на восприятие шероховатости (p < 0,0005) и трения (p < 0,0005), что указывает на эффективную передачу тактильных различий посредством разработанного метода. В частности, стимул S-150Гц вызвал статистически значимые изменения в восприятии шероховатости (p < 0,05), а также усиление ощущения трения при использовании вибрации частотой 150 Гц. Полученные данные подтверждают способность системы создавать реалистичные тактильные ощущения, что открывает новые возможности для разработки иммерсивных технологий и расширяет границы традиционной тактильной обратной связи.
Полученные данные указывают на перспективность разработки бесконтактных тактильных дисплеев, способных создавать захватывающие и реалистичные ощущения, превосходящие возможности традиционных систем передачи тактильной информации. В отличие от существующих технологий, требующих физического контакта с пользователем, данная методика открывает путь к созданию иммерсивных сред, где тактильные ощущения возникают без непосредственного прикосновения. Это позволяет расширить сферу применения тактильных технологий, например, в виртуальной и дополненной реальности, дистанционном управлении, и даже в создании новых форм взаимодействия человека с цифровым контентом, предлагая более естественный и интуитивно понятный опыт.
Исследование, посвященное тактильной обратной связи в воздухе посредством ультразвука, подтверждает идею о том, что системы не создаются, а скорее взращиваются. Авторы демонстрируют, как комбинируя статические и динамические компоненты ультразвукового воздействия, можно добиться стимуляции различных механорецепторов кожи, создавая иллюзию текстуры. Это не просто техническое достижение, а свидетельство того, что архитектура системы — это способ откладывать хаос, поскольку каждый выбор параметров ультразвукового излучения предсказывает будущие особенности тактильного восприятия. Как однажды заметил Марвин Мински: «Лучший способ спроектировать систему — это разработать способ ее самоорганизации». Данная работа как раз и представляет собой попытку организации сложного тактильного опыта через тщательно подобранные базовые компоненты воздействия.
Куда Ведет Эта Игра?
Исследование, посвященное синтезу тактильных ощущений в воздухе посредством ультразвука, не столько решает проблему, сколько обнажает её истинный масштаб. Попытка разложить прикосновение на три базовых компонента — это, по сути, признание нашей неспособности понять его целостность. Система, стремящаяся к точному воспроизведению текстур, неизбежно столкнется с непредсказуемостью человеческой перцепции. Каждый новый уровень реализма лишь подчеркнет хрупкость иллюзии, создаваемой алгоритмами. И это хорошо.
Истинный вопрос заключается не в том, как создать идеальную тактильную симуляцию, а в том, что произойдет, когда она сломается. Система, которая никогда не дает ощущения “помех”, мертва. В каждом сбое кроется возможность для нового открытия, для понимания границ нашей чувствительности. Попытки создать “бесшовный” опыт лишь откладывают неизбежное столкновение с реальностью.
В конечном счете, направление развития этой области должно быть направлено не на совершенствование технологий, а на изучение их взаимодействия с человеческим телом и разумом. Не на создание идеальной симуляции, а на понимание того, как несовершенство стимулирует воображение. В идеальном решении не остаётся места для человека, а именно в человеке — вся ценность.
Оригинал статьи: https://arxiv.org/pdf/2601.16767.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Лучшие смартфоны. Что купить в марте 2026.
- Нефть и бриллианты лидируют: обзор воскресных торгов на «СПБ Бирже» (08.03.2026 16:32)
- Новые смартфоны. Что купить в марте 2026.
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- Неважно, на что вы фотографируете!
- vivo iQOO Z10x ОБЗОР: яркий экран, удобный сенсор отпечатков, объёмный накопитель
- Российский рынок: Нефть, геополитика и лидерство «Сбербанка» (11.03.2026 13:32)
- Realme 9 ОБЗОР: чёткое изображение, лёгкий, высокая автономность
- Руководство по Stellaris — Полное прохождение на 100%
- Infinix Note 60 Ultra ОБЗОР: скоростная зарядка, объёмный накопитель, отличная камера
2026-01-26 12:18