Автор: Денис Аветисян
Новая разработка позволяет создавать тактильные датчики, способные одновременно отслеживать смещение, предсказывать силу воздействия и воссоздавать текстуру поверхности.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
MagicSkin использует полупрозрачные маркеры, внедренные в эластомер, для одновременного достижения точного отслеживания тангенциального смещения, прогнозирования силы и сохранения детализации поверхности.
Визуально-тактильные сенсоры сталкиваются с принципиальным компромиссом между точностью измерения смещения и способностью распознавать текстуру объектов. В статье ‘MagicSkin: Balancing Marker and Markerless Modes in Vision-Based Tactile Sensors with a Translucent Skin’ представлен инновационный подход, использующий полупрозрачные маркеры, внедренные в эластомерную основу, для одновременного отслеживания смещения, прогнозирования силы и сохранения деталей поверхности. Данное решение позволяет преодолеть ограничения традиционных сенсоров с маркерами и без них, достигая высокой точности в задачах классификации объектов (99.17%) и текстур (93.51%). Открывает ли это путь к созданию более совершенных тактильных систем для робототехники и позволит ли добиться качественно нового уровня взаимодействия робота с окружающим миром?
За гранью видимого: Сложности тактильного зондирования
Традиционные тактильные сенсоры, основанные на визуальном восприятии, сталкиваются с принципиальным компромиссом между точностью отслеживания тангенциального смещения и способностью к распознаванию текстур. В стремлении точно измерить скольжение и боковое движение объекта, сенсоры часто жертвуют детализацией изображения, необходимой для идентификации мелких структур поверхности. Это связано с тем, что методы, обеспечивающие высокую чувствительность к тангенциальным силам, как правило, снижают контрастность и разрешение, затрудняя классификацию текстур и, следовательно, полное понимание характеристик осязаемого объекта. В результате, возникает необходимость в разработке новых конструкций сенсоров, способных одновременно обеспечивать высокую точность измерения смещения и детальное распознавание текстур, что является ключевой задачей в области робототехники и протезирования.
Существующие методы тактильного зондирования, использующие непрозрачные маркеры с высокой плотностью нанесения, демонстрируют высокую точность в отслеживании смещений, однако, эта же особенность приводит к потере важных деталей, необходимых для классификации текстур и идентификации объектов. В то время как обнаружение движения и деформации происходит эффективно, непрозрачность маркеров препятствует визуализации тонких структур поверхности, что снижает способность сенсора к распознаванию материала и формы объекта. Таким образом, достигается компромисс между точностью измерения смещений и возможностью получения полной информации о тактильных свойствах, что ограничивает применение таких систем в задачах, требующих детального анализа текстуры, например, в робототехнике или протезировании.
Конструкции визуально-тактильных сенсоров (ВТС), использующие прозрачный эластомер, демонстрируют ограниченные возможности в отслеживании тангенциальных перемещений, что существенно влияет на их способность измерять силы сдвига. В отличие от систем, использующих непрозрачные маркеры, прозрачный эластомер не создает достаточного контраста для точного определения деформаций при боковом скольжении, что затрудняет измерение сил, действующих параллельно поверхности контакта. Эта особенность ограничивает применение таких сенсоров в задачах, требующих точной оценки сил трения или распознавания текстур, поскольку адекватное измерение сил сдвига является ключевым фактором для точного определения характеристик объекта и взаимодействия с ним. Таким образом, для повышения эффективности сенсоров на основе прозрачного эластомера необходимы инновационные подходы к усилению сигнала и улучшению контрастности, позволяющие более точно отслеживать деформации при тангенциальных перемещениях.
MagicSkin: Новая архитектура для осязания
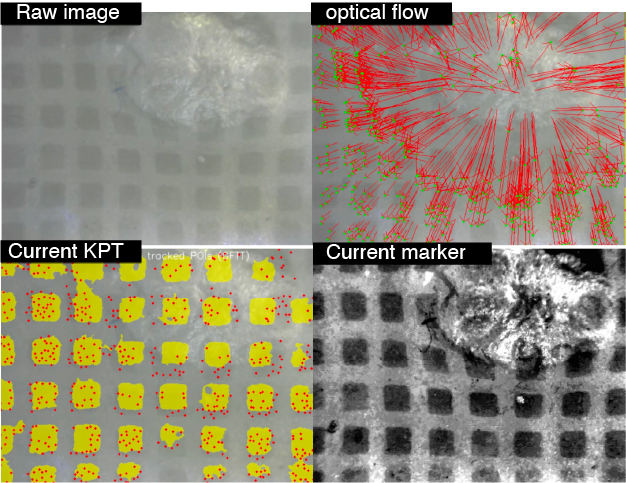
Архитектура “MagicSkin” представляет собой принципиально новый подход к отслеживанию деформаций и сбору данных о текстуре поверхности. Традиционно, системы, обеспечивающие высокую точность отслеживания перемещений маркеров, жертвуют разрешением при сборе информации о текстуре, и наоборот. “MagicSkin” устраняет это ограничение, позволяя одновременно получать точные данные о перемещениях и высококачественную информацию о текстуре поверхности, что достигается за счет использования полупрозрачных маркеров и алгоритмов оптического потока. Это позволяет создавать более детализированные и точные модели деформируемых объектов и расширяет возможности применения в различных областях, включая робототехнику и захват движения.
Архитектура MagicSkin использует принципы отслеживания оптического потока для точного измерения смещения маркеров. В основе лежит метод Лукаса-Канаде (Lucas-Kanade method), представляющий собой алгоритм дифференциального анализа, вычисляющий смещение каждого пиксела между последовательными кадрами видео. Этот метод предполагает, что смещение пикселей в небольшой окрестности остается примерно постоянным, что позволяет оценить вектор смещения для каждого пиксела и, следовательно, определить точное смещение маркера. Точность метода Лукаса-Канаде напрямую зависит от размера окрестности и качества изображения, а также от величины смещения между кадрами. Использование оптического потока позволяет избежать необходимости в сложных алгоритмах распознавания изображений и обеспечивает высокую скорость и точность отслеживания.
Архитектура MagicSkin реализуется в двух различных конструкциях: «Серые Квадраты» и «Серые Линии». Конструкция «Серые Квадраты» оптимизирована для приложений, требующих высокой точности отслеживания движения, в то время как конструкция «Серые Линии» обеспечивает повышенную эффективность в задачах, где приоритетом является скорость обработки и более широкое поле зрения. Обе конструкции используют принципы оптического потока, но различаются в расположении и форме маркеров, что позволяет адаптировать систему к различным сценариям использования и требованиям к производительности.

Прогнозирование силы: От данных к действию
Точное предсказание силы взаимодействия является критически важным для задач роботизированной манипуляции и развития передовых тактильных приложений. Неспособность точно оценивать прикладываемые силы может привести к повреждению объектов, ошибкам в сборке или неэффективному выполнению задач. MagicSkin разработан с учетом этой потребности, обеспечивая возможность получения данных, необходимых для построения моделей предсказания силы. Конструкция MagicSkin позволяет получать визуальную информацию о деформации поверхности, которая затем используется для оценки величины и направления приложенной силы, что значительно повышает надежность и эффективность роботизированных систем.
Для оценки приложенной силы и преобразования визуальных данных в количественные значения используются модели глубокого обучения. В частности, для предсказания силы по отдельному изображению применяется архитектура ResNet, обеспечивающая высокую точность оценки на основе статического визуального представления. Для анализа последовательности изображений, учитывающего динамику деформации, используется модель ResNet+ConvGRU, объединяющая возможности ResNet для извлечения признаков и ConvGRU для обработки временных зависимостей. Данный подход позволяет получить точные оценки силы на основе визуальной информации, что критически важно для задач роботизированной манипуляции и тактильных приложений.
Для оценки точности предсказания сил используются метрики, такие как средняя абсолютная ошибка ($MAE$) и коэффициент детерминации ($R^2$). Результаты валидации демонстрируют, что применяемая модель обеспечивает снижение $MAE$ на 66% по сравнению с использованием плотных чернильных маркеров при анализе последовательных изображений. Это подтверждает высокую точность предсказания сил, обеспечиваемую системой, и ее превосходство над традиционными методами визуальной оценки.

Повышение точности отслеживания и интеграция системы
Интеграция MagicSkin с передовыми методами отслеживания позы, такими как ‘NormalFlow’, значительно расширяет возможности системы для применения в робототехнике. ‘NormalFlow’ обеспечивает более точное и надежное определение положения и ориентации объекта, что критически важно для задач, требующих высокой степени точности манипуляций и взаимодействия. Данная интеграция позволяет MagicSkin эффективно работать в динамических средах и адаптироваться к сложным геометрическим формам, улучшая общую производительность и надежность робототехнических систем в различных сценариях применения, включая сборку, инспекцию и манипулирование деликатными объектами.
Точность отслеживания тангенциальных смещений была подтверждена путем минимизации ошибки «прямого-обратного распространения» (Forward-Backward Error) при анализе оптического потока. В ходе тестирования, система показала 97.0% удержание данных при ошибке 0.014 пикселей. Для сравнения, использование плотных чернильных маркеров обеспечило 62.9% удержание данных и ошибку 0.017 пикселей. Низкое значение ошибки «прямого-обратного распространения» указывает на высокую стабильность и надежность отслеживания деформаций поверхности.
Комбинация MagicSkin с усовершенствованными методами отслеживания положения позволила добиться высокой точности классификации объектов — 99.2% и распознавания текстур — 93.5%. Эти показатели значительно превосходят результаты, полученные с использованием плотных чернильных маркеров (98.3% и 63.9% соответственно) и прозрачного эластомера (98.4% и 85.0%). Данные результаты подтверждают эффективность предложенного подхода в задачах тактильного зондирования и позволяют повысить надежность робототехнических систем, требующих точного определения свойств объектов.

Взгляд в будущее: К интеллектуальным тактильным системам
Разработка MagicSkin представляет собой важный прорыв в создании действительно интеллектуальных тактильных систем, способных к тонкому взаимодействию с окружающей средой. В отличие от традиционных датчиков, воспринимающих лишь давление, MagicSkin обладает способностью распознавать сложные текстуры, форму объектов и даже их деформацию в реальном времени. Это достигается благодаря использованию сети микросенсоров, имитирующих принципы работы человеческой кожи и обеспечивающих высокую чувствительность и пространственное разрешение. Подобный уровень тактильной чувствительности открывает новые возможности для робототехники, позволяя создавать роботов, способных безопасно и эффективно манипулировать хрупкими предметами, адаптироваться к различным поверхностям и даже распознавать объекты на ощупь, подобно человеку. Использование данной технологии позволит значительно расширить сферу применения роботов в промышленности, медицине и повседневной жизни.
Дальнейшие исследования направлены на интеграцию MagicSkin с передовыми роботизированными платформами, что позволит создать роботов, способных не только ощущать, но и адекватно реагировать на тактильные стимулы. Особое внимание уделяется изучению потенциала MagicSkin в создании систем обратной тактильной связи для операторов, управляющих роботами дистанционно, а также в разработке усовершенствованных протезов, обеспечивающих более естественное и интуитивное управление для пользователей. Предполагается, что такая интеграция позволит значительно расширить возможности протезирования, давая возможность пациентам ощущать текстуру, температуру и форму предметов, улучшая качество жизни и возвращая утраченные функции. Данные разработки обещают революцию в области робототехники и протезирования, открывая новые горизонты для создания более адаптивных и человеко-ориентированных технологий.
Предлагаемый инновационный подход к тактильному сенсору обещает совершить революцию в области восприятия осязания, открывая новые возможности для создания более способных и адаптивных роботов и вспомогательных технологий. Вместо традиционных, жестких датчиков, эта технология использует гибкие и чувствительные материалы, способные регистрировать сложные тактильные данные, включая давление, вибрацию и текстуру поверхности. Это позволяет роботам не только определять наличие объекта, но и понимать его свойства, что критически важно для выполнения деликатных задач, таких как сборка мелких деталей или оказание помощи людям с ограниченными возможностями. Подобные системы, интегрированные в протезы, могут вернуть пациентам ощущение прикосновения и улучшить контроль над конечностями, а в робототехнике — значительно повысить эффективность и безопасность взаимодействия роботов с окружающей средой и людьми.

Исследование, представленное в работе, демонстрирует неизбежную борьбу между элегантной теорией и суровой реальностью. Авторы стремятся к идеальному балансу между точностью отслеживания и простотой реализации, но, как известно, любое «самовосстанавливающееся» решение рано или поздно столкнется с новыми, более изощренными способами сломаться. Подобно тому, как документация часто отстает от реального состояния системы, так и попытки создать универсальный сенсор, сочетающий достоинства marker-based и markerless подходов, неминуемо приводят к компромиссам. Как заметил Г.Х. Харди: «Математика — это наука о бесконечности, а жизнь слишком коротка, чтобы изучать бесконечность». В данном случае, бесконечное стремление к совершенству сенсора сталкивается с ограниченностью ресурсов и неизбежными погрешностями, а translucent markers становятся лишь одним из способов отсрочить неминуемое.
Куда Ведет Волшебство?
Представленная работа, безусловно, элегантна в своей попытке примирить достоинства и недостатки marker-based и markerless подходов к тактильным сенсорам. Однако, как показывает опыт, любая оптимизация рано или поздно потребует обратной оптимизации. Использование полупрозрачных маркеров — это компромисс, и вопрос в том, насколько долговечным окажется этот компромисс в реальных условиях эксплуатации. Продакшен всегда найдет способ упростить, урезать, и, возможно, сломать изящную схему.
Основной вызов, который остаётся нерешенным, — это масштабируемость и устойчивость системы к внешним помехам. Калибровка, адаптация к различным материалам и условиям освещения — это не столько научные задачи, сколько ежедневная рутина инженера. Пока сенсор остаётся лабораторным экспонатом, эти проблемы можно игнорировать. Но когда речь зайдет о массовом производстве, придётся вспомнить о законах физики и экономии.
В конечном итоге, «MagicSkin» — это ещё один шаг на пути к созданию действительно «чувствующей» кожи робота. Но архитектура — это не схема, а компромисс, переживший деплой. Поэтому, вместо того чтобы стремиться к идеальному сенсору, стоит сосредоточиться на создании систем, способных адаптироваться, самообучаться и прощать ошибки. Мы не рефакторим код — мы реанимируем надежду.
Оригинал статьи: https://arxiv.org/pdf/2512.06829.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Лучшие смартфоны. Что купить в марте 2026.
- vivo iQOO Z10x ОБЗОР: яркий экран, удобный сенсор отпечатков, объёмный накопитель
- Новые смартфоны. Что купить в марте 2026.
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- Нефть и бриллианты лидируют: обзор воскресных торгов на «СПБ Бирже» (08.03.2026 16:32)
- Неважно, на что вы фотографируете!
- Infinix Note 60 Ultra ОБЗОР: скоростная зарядка, объёмный накопитель, отличная камера
- Российский рынок: Нефть, геополитика и лидерство «Сбербанка» (11.03.2026 13:32)
- Руководство по Stellaris — Полное прохождение на 100%
- Realme 9 ОБЗОР: чёткое изображение, лёгкий, высокая автономность
2025-12-09 12:54