Автор: Денис Аветисян
Новая технология позволяет создавать гибкие сенсорные поверхности, способные адаптироваться к форме объектов и обеспечивать деликатное управление ими.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"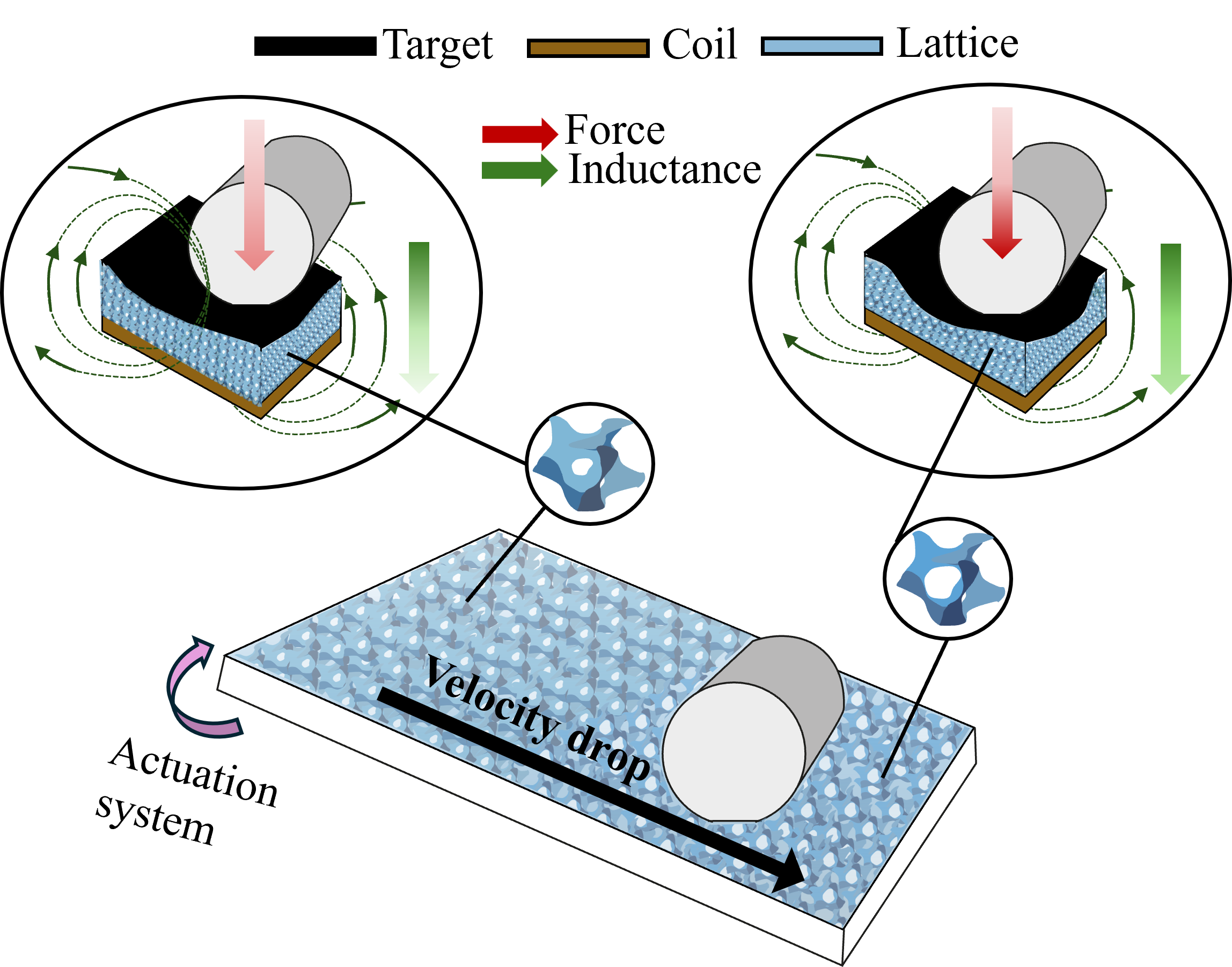
Исследование представляет систему COPESS, использующую 3D-печатные гироидные решетки для модуляции индуктивного зондирования и пассивной направляющей способности объектов.
Существующие системы манипулирования объектами на основе поверхностного захвата часто уступают в деликатности и тактильной обратной связи, необходимой для работы с хрупкими предметами. В данной работе, посвященной ‘Surface-based Manipulation Using Tunable Compliant Porous-Elastic Soft Sensing’, представлен COPESS — мягкий сенсорный интерфейс, использующий 3D-печатные гироидные решетки для модуляции индуктивного зондирования. Это позволяет настраивать жесткость и локализовать сенсорные данные, обеспечивая пассивное, но программируемое манипулирование объектами. Возможно ли создание адаптивных сенсорных поверхностей, способных к деликатной обработке широкого спектра объектов с различными механическими свойствами?
Принципы Мягкой Сенсорики: Введение в COPESS
Традиционные датчики, как правило, обладают недостаточной податливостью и адаптивностью, что существенно ограничивает их применение при манипулировании деликатными поверхностями. Жесткость материалов, из которых они изготовлены, приводит к нежелательному давлению и может повредить хрупкие объекты или нарушить точность измерений. Эта проблема особенно актуальна в областях, требующих взаимодействия с биологическими тканями, микрофлюидными системами или другими чувствительными материалами, где даже незначительное механическое воздействие может привести к нежелательным последствиям. Неспособность датчика приспосабливаться к форме поверхности также снижает качество сигнала и достоверность получаемых данных, что делает необходимым поиск альтернативных подходов к сенсорике.
Система COPESS представляет собой инновационный подход к мягкой сенсорике, объединяющий эластичные пористые материалы с передовыми методами регистрации изменений. В основе конструкции лежит сочетание податливости и точности, позволяющее создавать сенсоры, способные адаптироваться к форме объекта и регистрировать даже незначительные деформации. Благодаря использованию пористых материалов достигается высокая чувствительность и способность к регистрации распределенных нагрузок, что особенно важно в задачах, требующих деликатного взаимодействия и обратной связи. Интеграция с продвинутыми сенсорными технологиями обеспечивает точное и надежное измерение различных параметров, открывая новые возможности для применения в робототехнике, медицине и других областях, где необходим мягкий и адаптивный сенсорный интерфейс.
Конструкция COPESS разработана для преодоления ограничений, присущих жестким сенсорам в задачах, требующих деликатного взаимодействия и точной обратной связи. Традиционные сенсоры, обладая высокой точностью, часто не способны адаптироваться к сложным поверхностям или оказывать минимальное воздействие на объект измерения, что критично в таких областях, как роботизированная хирургия, захват хрупких предметов или мониторинг биологических тканей. В отличие от них, система COPESS, благодаря использованию пористых эластичных материалов, обеспечивает конформное прилегание к поверхности и распределение усилия, позволяя получать высокоточные данные о деформации и контакте без риска повреждения объекта. Такой подход открывает возможности для создания более безопасных и эффективных систем манипулирования и контроля в широком спектре применений, где важна деликатность и точность.

Гироидные Решетки: Основа Настраиваемого Сенсора
В основе сенсора COPESS лежит использование гироидных решеток — трехмерной печатной структуры, выполняющей функцию настраиваемого модулятора. Данные решетки, созданные методом стереолитографии, обеспечивают механическую податливость и возможность точной настройки чувствительности сенсора к приложенной силе за счет изменения их геометрии и плотности. Использование гироидной структуры позволяет преобразовывать деформацию под воздействием силы в изменяемый электрический сигнал, регистрируемый индуктивным сенсором, что обеспечивает высокую точность и динамический диапазон измерений.
Жесткость решетчатых структур типа гироида, используемых в сенсорах, напрямую зависит от их относительной плотности. Изменение плотности позволяет точно настраивать чувствительность сенсора к приложенной силе. В ходе исследований было установлено, что оптимизация относительной плотности решетки приводит к увеличению жесткости в 7 раз, что существенно расширяет диапазон измеряемых сил и повышает точность измерений. Этот подход обеспечивает возможность создания сенсоров с регулируемой чувствительностью для различных применений.
Изготовление структур гироидальных решеток осуществляется методом стереолитографии (SLA) с использованием фотополимерной смолы Elastic 50A V2. Выбор данной смолы обусловлен ее способностью к значительной деформации под нагрузкой (первоначальная податливость) и последующим полным восстановлением первоначальной формы после снятия нагрузки, что критически важно для функционирования датчика как упругого модулятора и обеспечения высокой чувствительности.

Декодирование Силы и Смещения: Индуктивный Сенсор в Действии
Индуктивное зондирование используется для регистрации изменений индуктивности, возникающих при деформации гироидной решетки. Принцип работы основан на том, что механическое воздействие на решетку изменяет расстояние между витками индукционных катушек, что напрямую влияет на общую индуктивность контура. Эти изменения индуктивности регистрируются с помощью специализированной электроники и служат основой для определения величины приложенной силы или степени деформации решетки. Чувствительность системы зависит от геометрии решетки, количества и расположения индукционных катушек, а также от характеристик измерительной схемы.
Для определения жесткости решетки гироида и калибровки чувствительности датчика генерируются форсировочные кривые (кривые зависимости силы от перемещения). Этот процесс позволяет установить взаимосвязь между приложенной силой и деформацией структуры, что необходимо для точного измерения приложенных нагрузок. В результате калибровки по форсировочным кривым удалось добиться 9-кратного увеличения рабочего диапазона прикладываемых сил, что существенно расширяет область применения датчика и позволяет измерять более значительные деформации.
Для точного измерения изменений индуктивности, вызванных деформацией гировидной решетки, используется преобразователь индуктивности в цифровой сигнал LDC1614. Этот прибор регистрирует данные, получаемые от массива катушек, обеспечивая высокую степень повторяемости измерений — коэффициент корреляции составляет 99.96%. Это позволяет получать надежные и воспроизводимые результаты, необходимые для калибровки датчика и характеристики жесткости решетки.

Пассивное Управление Объектами: К Интеллектуальной Мягкой Манипуляции
Программируемый градиент жесткости на поверхности сенсора обеспечивает пассивное наведение объектов, направляя их к областям с более низким сопротивлением. Реализация данного подхода основана на принципе минимизации энергии: объекты естественным образом перемещаются в зоны с меньшей механической нагрузкой. Контроль жесткости осуществляется путем изменения свойств материала или конфигурации элементов сенсорной поверхности, что позволяет создавать управляемые области с различным сопротивлением деформации. Данный метод не требует активного управления или применения внешних сил, что делает его энергоэффективным и подходящим для реализации в системах с ограниченными ресурсами.
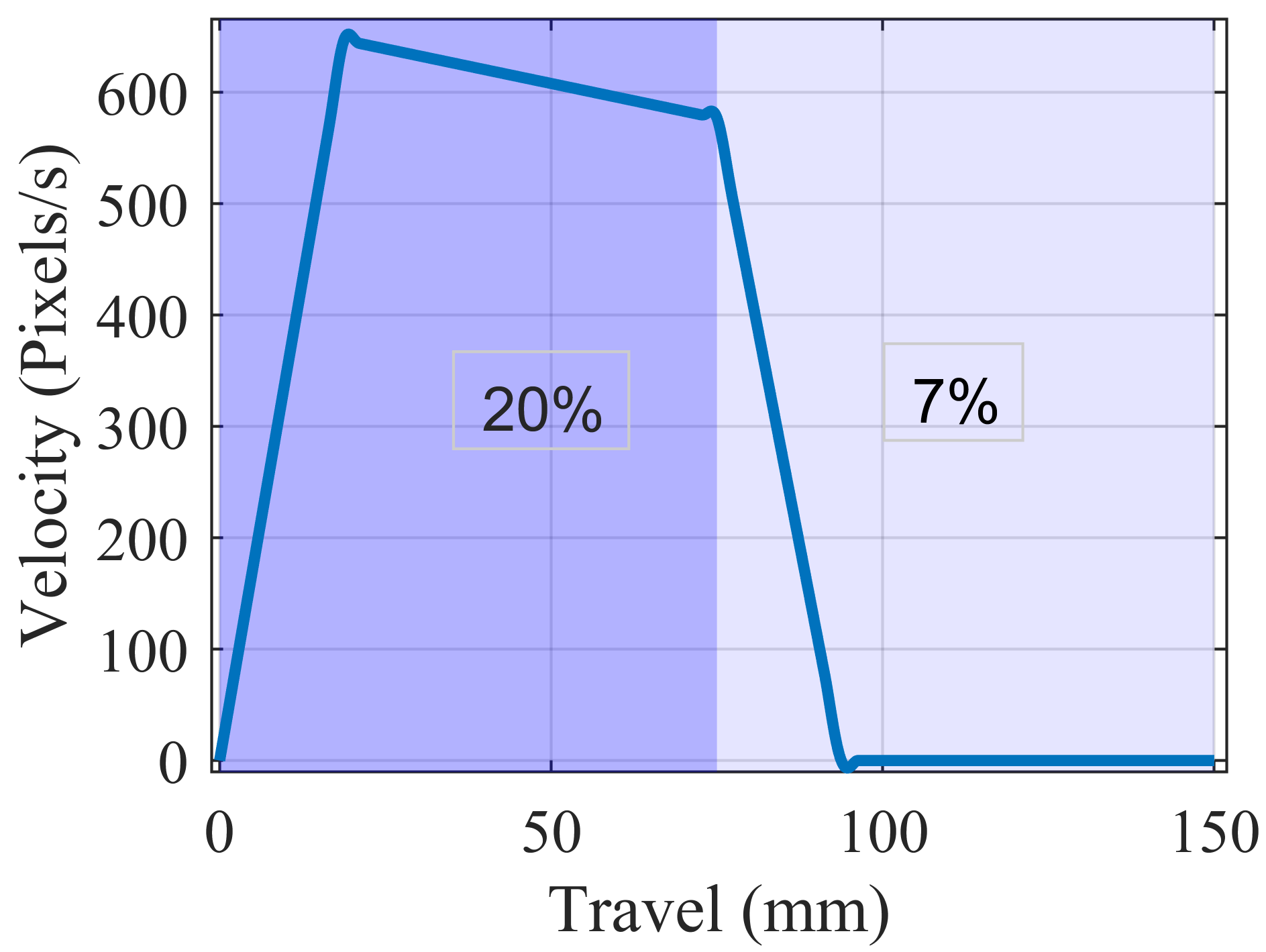
Эффективность пассивного направления объектов на основе градиента жесткости сенсорной поверхности напрямую зависит от скорости перемещения объекта. Наблюдается возможность динамического управления процессом, поскольку изменение скорости позволяет регулировать взаимодействие объекта с сенсором. В частности, при перемещении объекта по области с относительной плотностью 20% наблюдается незначительное замедление, что указывает на возможность точной настройки параметров управления для достижения требуемой траектории и скорости движения.
Конструкция COPESS демонстрирует потенциал в качестве универсальной платформы для мягкой роботизированной манипуляции и обеспечения тактильной обратной связи. Экспериментальные данные указывают на резкое снижение скорости перемещаемого объекта при переходе с зон, имеющих относительную плотность 20%, на зоны с плотностью 7%. Данный эффект указывает на возможность использования изменения плотности поверхности COPESS для создания управляемого сопротивления и, следовательно, точного позиционирования объектов, а также для предоставления пользователю информации о взаимодействии посредством изменения силы обратной связи.
Исследование демонстрирует, что точность манипуляций с объектами напрямую зависит от способности сенсорной поверхности адаптироваться к их геометрии и материалу. COPESS, представленный в данной работе, использует принципы модулируемой пористости и эластичности для достижения этой адаптивности, что позволяет не только обнаруживать контакт, но и пассивно направлять объекты. Как однажды заметил Марвин Минский: «Наиболее эффективные способы представления знаний — это те, которые позволяют компьютеру делать то, что он должен делать, не требуя от него знания того, как это делается». В контексте COPESS это означает, что сложная задача манипулирования упрощается за счет использования физических свойств материала и архитектуры, а не за счет сложных алгоритмов обработки данных. Гироидные структуры и настраиваемый слой обеспечивают необходимую гибкость и чувствительность, позволяя системе «чувствовать» объект и реагировать на него соответствующим образом, что соответствует идее Минского об эффективности неявного знания.
Что Дальше?
Представленная работа, несомненно, демонстрирует элегантность подхода к тактильному зондированию, основанного на модуляции индуктивного сигнала через геометрически сложные решетчатые структуры. Однако, пусть N стремится к бесконечности — что останется устойчивым? Прочность, полученная за счет сложной геометрии, неизбежно сопряжена с ограничениями в масштабируемости и сложностью изготовления. Необходимо задаться вопросом: насколько хорошо данная концепция перенесется на системы, требующие обработки объектов с существенно различающимися механическими свойствами и формами?
Основным узким местом остается зависимость от предварительно заданных параметров решетки. Возможность адаптации характеристик сенсора в реальном времени, без перекомпоновки структуры, представляется нетривиальной задачей. Следовательно, перспективным направлением представляется разработка алгоритмов, позволяющих компенсировать несовершенство модели и калибровать сенсор непосредственно в процессе взаимодействия с объектом.
В конечном счете, истинная ценность подобного рода исследований заключается не в создании очередного тактильного сенсора, а в углублении понимания фундаментальных принципов взаимодействия между сложными деформируемыми структурами и окружающим миром. Поиск решений, отличающихся не просто работоспособностью на тестовых примерах, а математической доказуемостью и предсказуемостью, остается краеугольным камнем прогресса в данной области.
Оригинал статьи: https://arxiv.org/pdf/2602.21028.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Искусственный интеллект, ориентированный на человека: новый подход
- Российский рынок в зоне турбулентности: рубль, ставки и новые риски (10.04.2026 01:32)
- Motorola Moto G34 ОБЗОР: большой аккумулятор, быстрый сенсор отпечатков, лёгкий
- Honor X80i ОБЗОР: плавный интерфейс, большой аккумулятор, объёмный накопитель
- Realme Narzo 70 ОБЗОР: плавный интерфейс, большой аккумулятор, замедленная съёмка видео
- Proton только что запустил альтернативу Google Workspace и Microsoft 365, ориентированную на конфиденциальность.
- Canon EOS 80D
- Oppo Find X9 Ultra ОБЗОР: большой аккумулятор, скоростная зарядка, чёткое изображение
- Новое бесплатное приложение для диктовки от Google — это альтернатива Willow, которую вы ждали.
- Рост облигаций и геополитика: что ждет инвесторов в апреле? (08.04.2026 17:32)
2026-02-25 22:50