Автор: Денис Аветисян
Новое исследование демонстрирует, что использование дополнительных роботизированных конечностей может значительно улучшить способность человека сохранять равновесие и адаптироваться к возмущениям.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"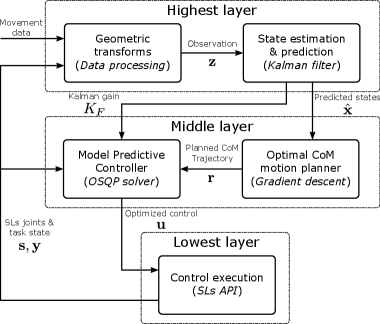
Предложена и экспериментально подтверждена иерархическая система управления для роботизированных дополнительных конечностей, использующая предсказательное кодирование и модельно-предиктивное управление для улучшения стабильности человека.
Несмотря на значительный потенциал сверхкомплектных роботизированных конечностей в расширении возможностей человека, их широкое применение сдерживается проблемами обеспечения безопасности и универсальности управления. В данной работе, посвященной ‘Augmenting Human Balance with Generic Supernumerary Robotic Limbs’, предложена и экспериментально подтверждена иерархическая система управления, позволяющая эффективно поддерживать равновесие человека при использовании дополнительных роботизированных конечностей. Ключевым элементом является предсказание динамики центра масс и компенсация отклонений, что обеспечивает снижение нестабильности при наклонах вперед и в стороны. Не откроет ли это путь к созданию более надежных и интуитивно понятных систем взаимодействия человека и робота, расширяющих физические возможности людей в различных сферах деятельности?
Равновесие на грани: Искусство поддержания устойчивости
Поддержание равновесия человеком представляет собой удивительно сложный процесс, где физические законы неразрывно переплетаются с работой нервной системы. Каждый, даже самый незначительный, сдвиг центра тяжести вызывает каскад корректирующих реакций, осуществляемых посредством координации мышц и постоянной обработки информации, поступающей от вестибулярного аппарата, зрения и проприоцепции. Однако эта тонкая настройка крайне уязвима: внешние возмущения, такие как толчок или неровная поверхность, равно как и внутренние факторы — слабость мышц, нарушения координации или неврологические расстройства — способны легко вывести систему из равновесия. Неспособность быстро и эффективно компенсировать эти возмущения приводит к потере устойчивости и, как следствие, к падению, что особенно опасно для пожилых людей и пациентов с ограниченными возможностями.
Традиционные протезы и вспомогательные устройства зачастую не способны обеспечить действительно естественную и интуитивно понятную поддержку, поскольку их конструкция ориентирована на реактивное, а не проактивное взаимодействие с пользователем. Эти устройства, как правило, реагируют на уже начавшееся движение, а не предвосхищают намерения человека, что приводит к ощущению неестественности и требует от пользователя дополнительных усилий для поддержания равновесия и координации. В результате, даже самые современные механические протезы могут вызывать усталость и дискомфорт, ограничивая возможности человека и снижая качество его жизни. Отсутствие адаптивности к индивидуальным особенностям и динамически меняющимся условиям окружающей среды является ключевой проблемой, препятствующей созданию по-настоящему эффективных и комфортных вспомогательных технологий.
Эффективное усиление возможностей человека требует не просто приложения силы, но и прогнозируемой поддержки, согласованной с намерениями пользователя. Исследования показывают, что традиционные вспомогательные устройства часто реагируют на нарушение равновесия, а не предотвращают его. Вместо этого, современные разработки направлены на предвидение движений и намерений, используя сложные алгоритмы и датчики для анализа нейромышечной активности и биомеханических параметров. Такой проактивный подход позволяет системе не просто компенсировать отклонения, но и активно поддерживать естественные движения, создавая ощущение плавности и интуитивности. \Delta t — время, необходимое для прогнозирования движения — является критическим параметром, и современные системы стремятся минимизировать его, обеспечивая практически мгновенную реакцию и максимальный комфорт для пользователя.
Предвидеть, чтобы поддерживать: Иерархическая структура прогнозирования
Предлагаемый иерархический каркас предсказательного кодирования предназначен для управления взаимодействием между человеком и дополнительными роботизированными конечностями. Этот каркас структурирован иерархически для обеспечения масштабируемости и адаптивности к различным сценариям взаимодействия. Он основан на принципе предсказания будущих состояний системы человек-робот, что позволяет перейти от реактивного управления к проактивному. Иерархическая структура позволяет разделять задачи моделирования и управления на различные уровни абстракции, оптимизируя вычислительную эффективность и обеспечивая гибкость в настройке параметров системы. В рамках каркаса используются модели динамики, позволяющие прогнозировать траектории движения и силы, необходимые для стабилизации и усиления возможностей пользователя.
В рамках предложенной системы используется оценка состояния для непрерывного моделирования динамики взаимодействия человека и дополнительных роботизированных конечностей. Методы, такие как Линейный Квадратичный Оцениватель, применяются для построения математической модели, учитывающей текущие наблюдения и предсказывающей будущее состояние системы. \hat{x}_t = f(\hat{x}_{t-1}, u_{t-1}) + K_t(z_t - h(\hat{x}_{t-1}, u_{t-1})) , где \hat{x}_t — оценка состояния на шаге t, u — управляющее воздействие, z — измерения, а K — матрица Калмана. Непрерывная оценка состояния позволяет системе адаптироваться к изменениям в динамике взаимодействия и обеспечивать более точное предсказание будущих состояний, что критически важно для реализации проактивной стабилизации и интуитивного усиления.
В основе предложенной системы лежит использование оптимального управления и планирования траектории, основанных на кинематической модели, для генерации вспомогательных сил, обеспечивающих проактивную стабилизацию пользователя. Кинематическая модель определяет взаимосвязь между положениями и скоростями суперорудий и тела человека, позволяя предсказывать влияние движений робота на стабильность пользователя. Алгоритмы оптимального управления рассчитывают траектории движения суперорудий, минимизирующие отклонения от желаемой траектории и обеспечивающие необходимую поддержку. Это позволяет не просто реагировать на нарушения равновесия, а предвидеть их и заранее компенсировать, создавая эффект плавной и интуитивно понятной аугментации.
В отличие от реактивных систем поддержки, которые активируются только после обнаружения нарушения равновесия, предложенная нами система использует прогнозирование будущих состояний для обеспечения превентивной стабилизации. Это достигается за счет непрерывного моделирования динамики взаимодействия человека и дополнительных роботизированных конечностей, что позволяет генерировать корректирующие силы до возникновения необходимости в экстренной поддержке. Такой подход обеспечивает более плавную и интуитивно понятную аугментацию, поскольку система не просто реагирует на отклонения, а предвидит и предотвращает их, создавая ощущение естественного продолжения движений пользователя.
Виртуальная реальность как полигон: Проверка предсказательных способностей
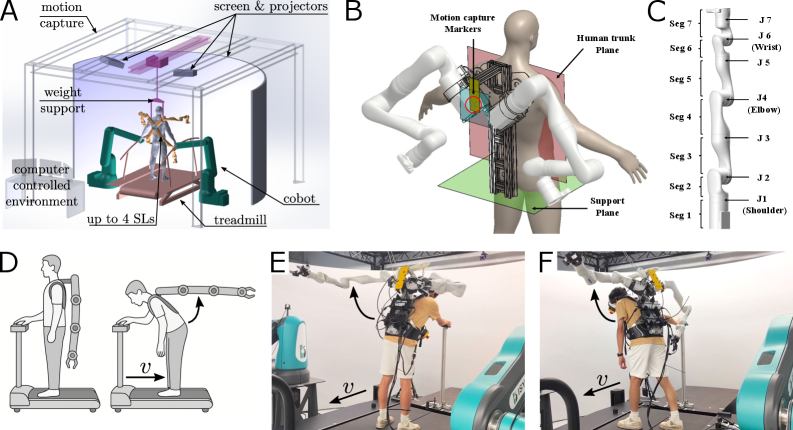
Многорукая виртуальная среда обеспечивает одновременное измерение движений человека и управление носимыми сверхчисленными роботизированными конечностями. Данная система позволяет регистрировать кинематические и динамические параметры как естественных движений человека, так и активных действий роботизированных протезов, используя комплекс сенсорных систем и алгоритмов обработки данных. Синхронный сбор данных о движениях человека и управлении роботизированными конечностями необходим для анализа взаимодействия человека и робота, а также для разработки и тестирования алгоритмов управления, обеспечивающих согласованную и интуитивно понятную работу системы. Возможность одновременного измерения и управления позволяет проводить исследования в контролируемых условиях, что критически важно для оценки эффективности и безопасности разработанных алгоритмов.
Многорукая виртуальная среда обеспечивает возможность тестирования предсказательных способностей Иерархической Структуры Прогнозирующего Кодирования в безопасных и контролируемых условиях. Данная среда позволяет изолированно оценивать эффективность алгоритмов прогнозирования движения и контроля, не подвергая испытуемых риску падений или травм, характерным для экспериментов с реальными роботами. Система регистрирует кинематические данные человека и одновременно управляет дополнительными роботизированными конечностями, позволяя точно измерять и анализировать влияние предсказательных моделей на стабильность и координацию движений. Это способствует итеративному усовершенствованию алгоритмов и валидации их работоспособности перед внедрением в реальные прототипы устройств.
В ходе итеративных экспериментов было продемонстрировано, что разработанная иерархическая система предсказательного кодирования эффективно уменьшает расстояние между центром масс и плоскостью опоры в ходе фронтальных и латеральных испытаний с наклоном. Полученные данные свидетельствуют о статистически значимом улучшении данного показателя по сравнению с условиями ‘HOnly’ и ‘NoComp’ (p<0.05, коэффициент Коэна D > 0.72). Это указывает на способность системы активно стабилизировать положение тела и улучшать устойчивость при выполнении движений, требующих поддержания равновесия.
Данные, полученные в ходе экспериментов, подтверждают снижение расстояния между центром давления и плоскостью опоры в ходе испытаний с наклонами вперед и в стороны по сравнению с условием ‘NoComp’ (p<0.05, Cohen’s D > 0.9 для frontal и Cohen’s D > 1.9 для lateral). Это указывает на способность разработанной системы обеспечивать плавную и интуитивно понятную поддержку, а также снижать асимметрию вокруг 0N, что свидетельствует об эффективности предложенного подхода к управлению дополнительными роботизированными конечностями.
К устойчивому будущему: Адаптация и расширение возможностей
Анализ Липшица предоставляет строгую математическую основу для доказательства стабильности и устойчивости иерархической системы предсказующего кодирования в различных условиях. Данный подход позволяет формально оценить, насколько система способна сохранять свою работоспособность и предсказуемость при изменениях во внешней среде или внутренних параметрах. L-ограниченность, ключевое понятие анализа Липшица, гарантирует, что небольшие возмущения входных данных не приведут к неограниченному росту выходных сигналов, что критически важно для надежной работы ассистивных технологий. Благодаря этому математическому инструменту, разработчики могут уверенно конструировать системы, способные адаптироваться к неопределенности и обеспечивать стабильную поддержку пользователей в реальных условиях, повышая их безопасность и эффективность.
Разработка многоагентного управления значительно расширяет возможности и гибкость иерархической системы предсказующего кодирования, позволяя применять ее в сложных сценариях с участием нескольких вспомогательных устройств или роботов-партнеров. Вместо управления одним устройством, система способна координировать действия нескольких агентов, например, экзоскелета и роботизированной руки, для достижения общей цели — обеспечения поддержки и помощи пользователю. Это позволяет более эффективно решать задачи, требующие совместных усилий, и адаптироваться к изменяющимся условиям окружающей среды. Реализация подобного управления требует разработки алгоритмов, обеспечивающих согласованность действий агентов, предотвращение конфликтов и оптимизацию производительности всей системы, что открывает перспективы для создания действительно интеллектуальных и персонализированных ассистивных технологий.
Современные разработки в области вспомогательных технологий открывают перспективы для создания систем, способных адаптироваться к уникальным потребностям каждого пользователя. Вместо универсальных решений, предлагается индивидуальный подход, учитывающий особенности моторики, когнитивных способностей и личных предпочтений. Это достигается благодаря применению алгоритмов машинного обучения и интеллектуального анализа данных, позволяющих системе «обучаться» на взаимодействии с конкретным человеком и оптимизировать свою работу для достижения максимальной эффективности и комфорта. В результате, вспомогательные устройства становятся не просто инструментами, облегчающими выполнение определенных задач, а полноценными партнерами, способствующими повышению самостоятельности и улучшению качества жизни.
В конечном счете, проводимые исследования направлены на восстановление или улучшение двигательных возможностей и независимости людей, предоставляя им возможность вести более насыщенную и активную жизнь. Разрабатываемые технологии призваны преодолеть ограничения, связанные с физическими недостатками или возрастными изменениями, позволяя индивидуумам сохранять самостоятельность в повседневных задачах и расширять спектр доступных видов деятельности. Усилия ученых сосредоточены на создании адаптивных систем, которые не просто компенсируют утраченные функции, но и способствуют повышению качества жизни, даря уверенность и свободу передвижения. Результаты этих разработок имеют потенциал для значительного улучшения благополучия и социальной интеграции людей с ограниченными возможностями, открывая новые перспективы для их личного и профессионального развития.
Исследование демонстрирует, что добавление дополнительных конечностей не просто расширяет физические возможности человека, но и требует принципиально нового подхода к управлению движением. Иерархическая система управления, описанная в статье, предвосхищает отклонения от равновесия, что напоминает о необходимости глубокого понимания системы для её эффективного использования. Брайан Керниган однажды заметил: «Простота — это высшая степень совершенства». В контексте разработки подобных систем, эта фраза приобретает особое значение: сложность алгоритмов должна быть оправдана реальным улучшением баланса и предсказуемостью поведения, а не превращаться в самоцель. В данном случае, предсказательное кодирование позволяет системе не только реагировать на возмущения, но и активно предотвращать их, демонстрируя элегантное решение сложной задачи.
Куда Ведет Дорога?
Представленная работа демонстрирует, что искусственное расширение кинематических возможностей человека — это не просто техническая прихоть, а потенциальный способ переосмыслить саму природу равновесия. Однако, кажущаяся элегантность иерархического управления и предсказательного кодирования лишь маскирует глубинные вопросы. По сути, речь идёт не о создании «супер-человека», а о взломе системы проприоцепции, о перехвате управления телом. И здесь возникает парадокс: чем сложнее система компенсации, тем более хрупким становится сам человек, полагающийся на неё.
Дальнейшие исследования неизбежно потребуют отхода от упрощенных моделей и перехода к учету нелинейности человеческой моторики, к адаптации к индивидуальным особенностям каждого пользователя. Важно не просто компенсировать нарушения равновесия, но и понять, как эти дополнительные конечности влияют на когнитивные процессы, на самовосприятие тела. Необходимо исследовать, как долго мозг сможет поддерживать иллюзию целостности, когда количество «я» расширяется за счет роботизированных протезов.
В конечном счете, это не просто инженерная задача. Это — философский эксперимент, ставящий под сомнение границы человеческого тела и разума. И, как показывает история, любая попытка взломать систему неизбежно приводит к появлению новых, ещё более изощренных механизмов защиты. Именно в этом — истинная безопасность, а не в иллюзии контроля.
Оригинал статьи: https://arxiv.org/pdf/2602.15092.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Oppo Find X9 Ultra ОБЗОР: большой аккумулятор, скоростная зарядка, чёткое изображение
- Российская экономика: замедление, дивиденды и ожидания снижения ставки ЦБ (02.04.2026 00:32)
- Российский рынок: Рубль, Нефть и Корпоративные Истории – Что Ждет Инвесторов? (02.04.2026 23:32)
- Неважно, на что вы фотографируете!
- Motorola Moto G34 ОБЗОР: большой аккумулятор, быстрый сенсор отпечатков, лёгкий
- Рекомендации нового поколения: объединяя визуальное и текстовое
- Технологии и вера: новый взгляд на инклюзивный дизайн
- Российский рынок: Резервы тают, инвестиции растут, прибыли падают: что ждет инвесторов? (02.04.2026 16:32)
- Лучшие смартфоны. Что купить в апреле 2026.
- Honor X80i ОБЗОР: плавный интерфейс, большой аккумулятор, объёмный накопитель
2026-02-18 17:32