Автор: Денис Аветисян
Новый подход позволяет точно определять действия рабочих с инструментами в промышленных условиях, используя возможности синтетических данных и искусственного интеллекта.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"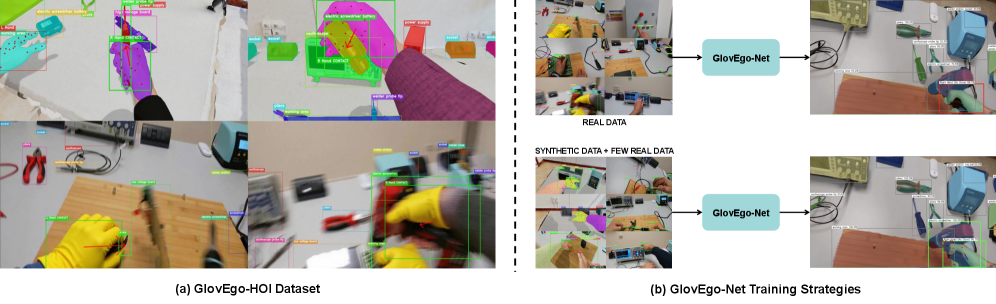
Представлен датасет GlovEgo-HOI и модель GlovEgo-Net для распознавания взаимодействий человека и объектов в промышленной среде с применением диффузионных моделей и синтетических данных.
Несмотря на важность анализа взаимодействий человека с объектами в промышленной среде, разработка надежных моделей затруднена из-за нехватки размеченных данных. В данной работе, ‘GlovEgo-HOI: Bridging the Synthetic-to-Real Gap for Industrial Egocentric Human-Object Interaction Detection’, представлен новый подход, объединяющий синтетические данные и диффузионные модели для аугментации реальных изображений с реалистичным отображением средств индивидуальной защиты. Предложенный датасет GlovEgo-HOI и модель GlovEgo-Net, использующая информацию о позе руки, демонстрируют эффективность в обнаружении взаимодействий. Способны ли подобные методы значительно повысить безопасность и автоматизацию в промышленных условиях?
Понимание Системы: Вызовы Промышленного Зрения
Автоматизированный контроль качества в промышленности сталкивается с существенными трудностями при распознавании взаимодействий между человеком и объектами (ВЧО), особенно когда речь идет об использовании различных типов перчаток. Традиционные алгоритмы компьютерного зрения часто оказываются неспособными эффективно различать руку работника, манипулирующую деталью, и саму деталь, особенно если на руке надета перчатка, изменяющая форму и текстуру кисти. Это приводит к ложным срабатываниям или, наоборот, к пропуску важных дефектов, что снижает эффективность контроля и может представлять угрозу безопасности. Различия в цвете, материале и степени изношенности перчаток, а также вариативность освещения на производстве, усугубляют проблему, требуя разработки более устойчивых и адаптивных систем распознавания, способных учитывать эти факторы.
Существующие наборы данных для обучения систем машинного зрения, предназначенных для автоматизированного контроля на производстве, зачастую не обеспечивают необходимого разнообразия и объема для создания действительно надежных и точных моделей. Ограниченное количество примеров различных манипуляций с объектами, вариаций освещения, углов обзора и, особенно, недостаточная репрезентация сценариев с использованием перчаток разного типа, приводят к тому, что обученные системы демонстрируют низкую производительность в реальных производственных условиях. Такой недостаток данных особенно критичен для распознавания взаимодействия человека с объектами, поскольку модели, обученные на узком наборе примеров, не способны обобщать полученные знания и адаптироваться к новым, ранее не встречавшимся ситуациям, что снижает эффективность автоматизированного контроля качества и безопасности на предприятиях.
Точное распознавание взаимодействий человека с объектами (EHOI) играет критически важную роль в обеспечении безопасности и повышении эффективности промышленных процессов. Автоматизированное отслеживание действий рабочих позволяет своевременно выявлять потенциально опасные ситуации, предотвращая несчастные случаи и снижая риски производственных травм. Кроме того, система EHOI способствует оптимизации рабочих потоков за счет анализа паттернов взаимодействия с оборудованием и материалами, что ведет к повышению производительности и сокращению издержек. Не менее значима и возможность проактивного обслуживания: отслеживая манеру работы с инструментами и деталями, система может сигнализировать о признаках износа или неисправностей, позволяя проводить техническое обслуживание до возникновения серьезных поломок и дорогостоящих простоев, тем самым обеспечивая непрерывность производственного цикла и минимизируя финансовые потери.
GlovEgo-Net: Мультимодальный Подход к Распознаванию EHOI
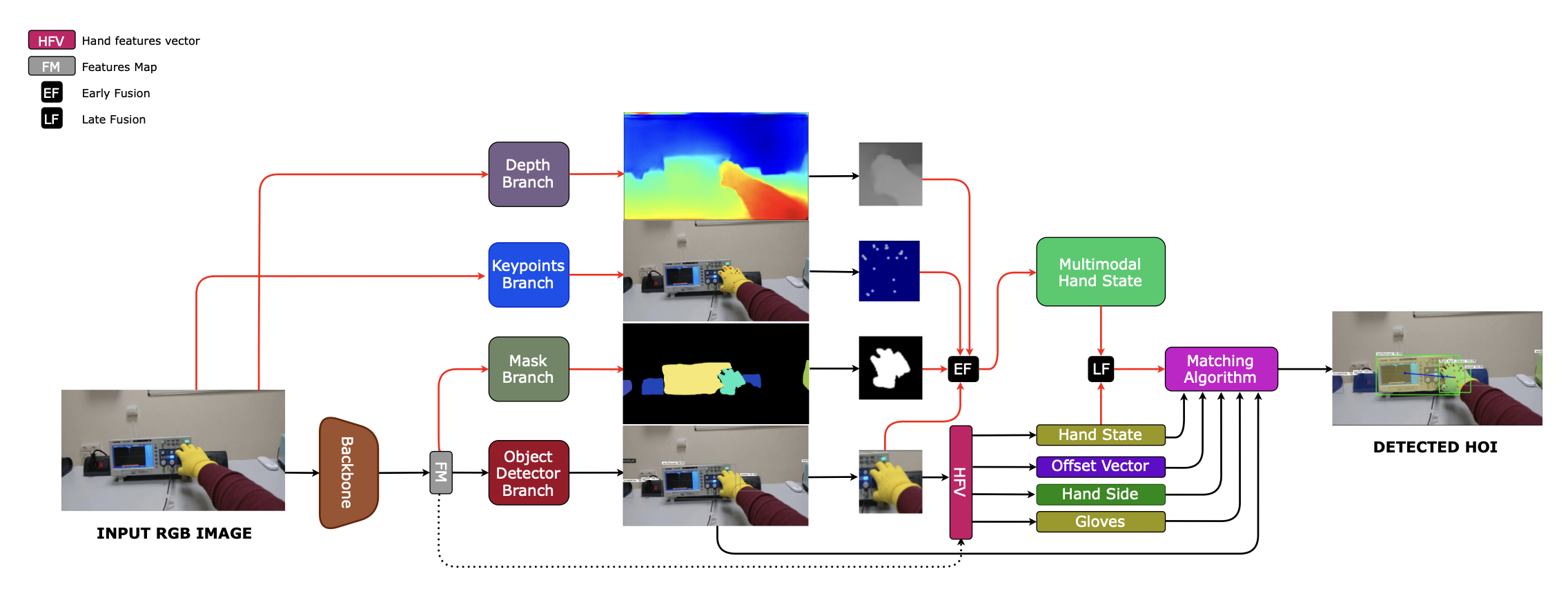
GlovEgo-Net использует мультимодальную архитектуру, объединяющую данные визуального спектра с точной оценкой положения руки и пальцев. Данный подход предполагает одновременную обработку изображений и данных о ключевых точках руки, что позволяет модели учитывать как визуальные характеристики объектов, так и пространственное расположение и конфигурацию кисти. Интеграция данных о положении руки позволяет более точно определить взаимодействие руки с объектами, повышая надежность и точность системы распознавания и отслеживания.
Архитектура GlovEgo-Net включает в себя три основных компонента. “Glove-Head” предназначен для точного обнаружения перчаток на изображении. “Keypoint-Head” отвечает за оценку позы руки, определяя ключевые точки на ладони и пальцах. В качестве основы (“backbone”) используется ResNet-101 в сочетании с Feature Pyramid Network (FPN), обеспечивающими надежную и многоуровневую экстракцию признаков из входного изображения. Такая комбинация позволяет модели эффективно обрабатывать визуальную информацию и извлекать релевантные признаки для последующего анализа и распознавания.
В GlovEgo-Net для эффективной интеграции визуальных данных и оценок положения руки используются методы раннего и позднего слияния (Early and Late Fusion). Применение Keypoint-Head, отвечающего за определение ключевых точек руки, позволило достичь среднего значения точности (mAP) для обнаружения руки и объекта в 60.28%. Это представляет собой значительное улучшение по сравнению с результатом в 62.95%, полученным при исключении Keypoint-Head из архитектуры, что подтверждает важность использования информации о ключевых точках для повышения общей производительности модели.
Создание Надежного Набора Данных: GlovEgo-HOI-Real
Набор данных GlovEgo-HOI представляет собой комбинированный ресурс, включающий существующий набор EgoISM-HOI и вновь сгенерированный GlovEgo-HOI-Real. EgoISM-HOI обеспечивает базовый набор данных для анализа взаимодействий человека и объектов, в то время как GlovEgo-HOI-Real расширяет его, предоставляя большее разнообразие сцен и аннотаций. Такая комбинация позволяет создавать более масштабируемый и надежный набор данных для обучения и оценки моделей, предназначенных для распознавания взаимодействий человека и объектов в условиях реального мира. Общий объем данных обеспечивает возможность обучения более обобщенных моделей, способных эффективно работать в различных сценариях.
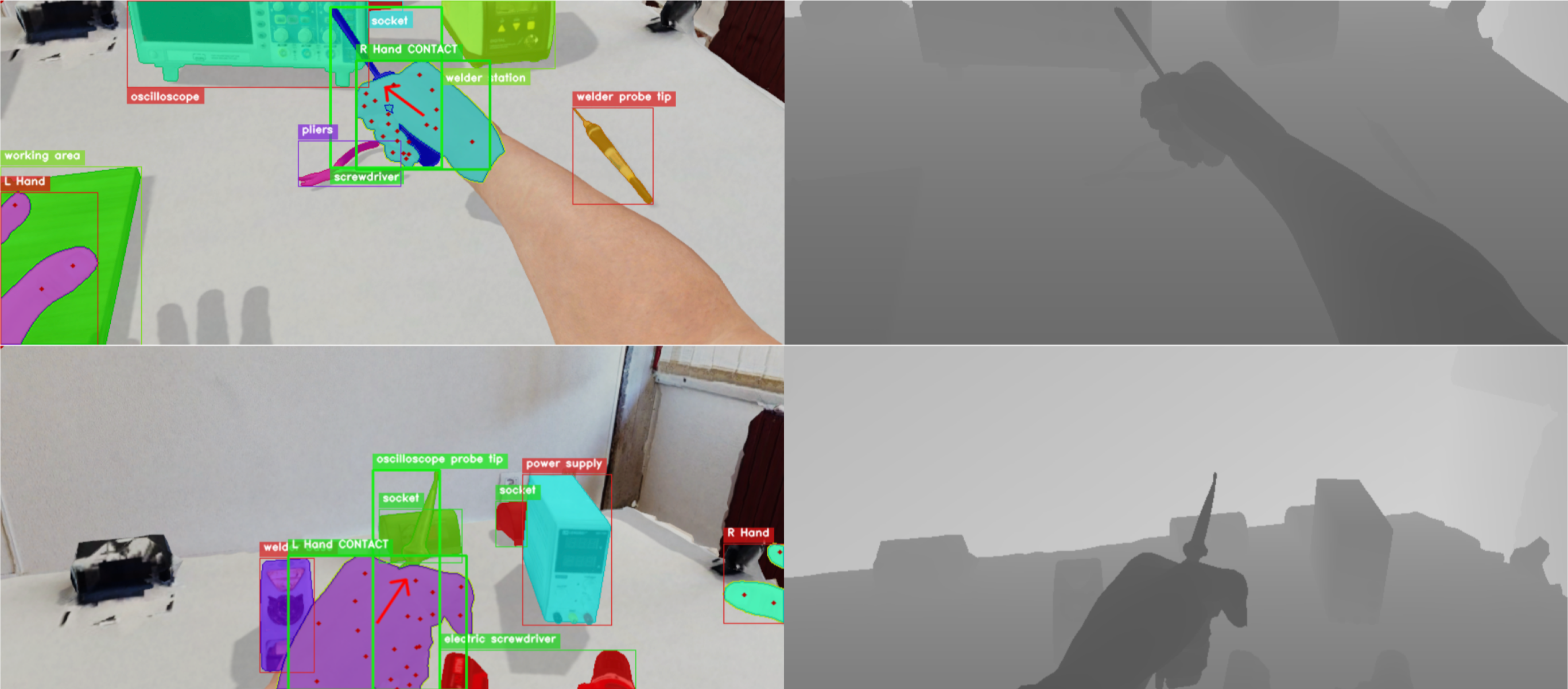
Набор данных GlovEgo-HOI-Real формируется посредством конвейера, использующего диффузионную модель и FLUX для реалистичной интеграции перчаток в изображения. Диффузионная модель генерирует изображения с перчатками, а FLUX обеспечивает правдоподобное наложение и адаптацию перчаток к существующим объектам и условиям освещения на исходных изображениях. Этот подход позволяет создавать синтетические данные, максимально приближенные к реальным, что повышает эффективность обучения моделей распознавания взаимодействий человека с объектами (HOI).
При обучении на объединенном наборе данных, включающем синтетические и реальные изображения (Synth+Real), была достигнута максимальная средняя точность (mAP) в 19.06% на датасете GlovEgo-HOI. Этот показатель превосходит результаты, полученные при обучении исключительно на реальных данных (Real-Only), где mAP составил 18.12%. Разница в 0.94% демонстрирует эффективность комбинирования синтетических и реальных данных для повышения точности моделей, работающих с задачами распознавания взаимодействий человека и объектов.

За Пределами Обнаружения: Открытие Интеллектуального Взаимодействия
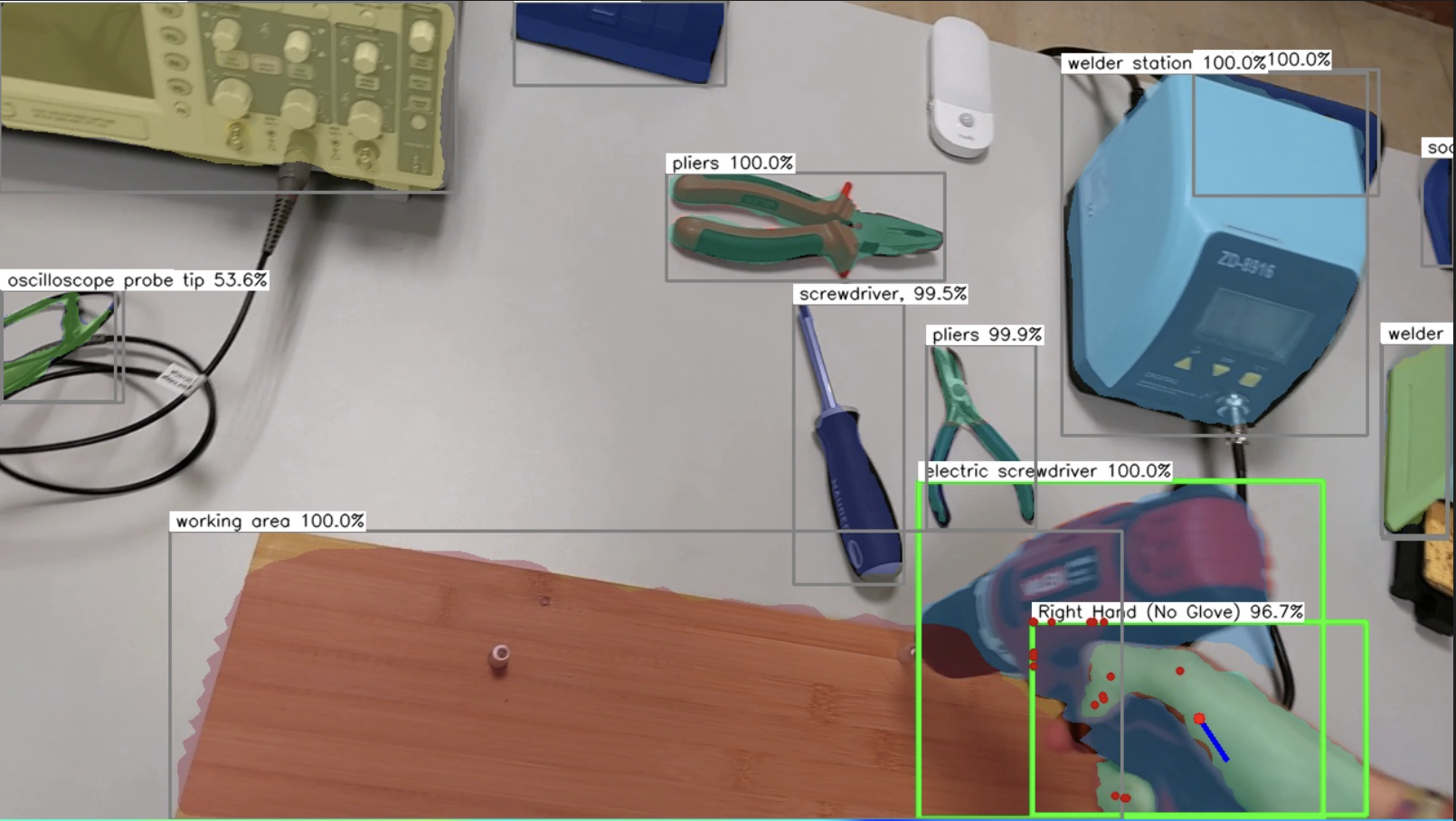
GlovEgo-Net демонстрирует высокую точность в определении положения руки и ее контакта с объектами, что позволяет детально понимать выполняемые человеком действия. Система способна точно выявлять ключевые точки руки — положение пальцев, ладони и запястья — и одновременно оценивать, соприкасается ли рука с каким-либо предметом, и характер этого контакта. Такой подход позволяет не только отслеживать движения рук, но и интерпретировать намерения человека, основываясь на взаимодействии с окружающим миром. Благодаря этому, GlovEgo-Net открывает возможности для создания интеллектуальных систем, способных понимать и предсказывать действия человека в реальном времени, что крайне важно для робототехники, виртуальной реальности и систем помощи людям.
Система, связывая руки с объектами в окружающей среде, выходит за рамки простого отслеживания движений. Этот подход позволяет ей делать выводы о намерениях человека и прогнозировать потенциальные опасности. Например, если система фиксирует, что рука приближается к горячей поверхности, она может идентифицировать это как потенциально опасную ситуацию и предупредить пользователя. Ассоциация рук и объектов также помогает системе понимать контекст действий: захват ручки указывает на намерение открыть дверь, а приближение руки к кнопке — на желание активировать устройство. Таким образом, система не просто регистрирует действия, а интерпретирует их, создавая более безопасное и интуитивно понятное взаимодействие между человеком и технологиями.
Модель демонстрирует впечатляющую скорость обработки информации, достигая задержки в 148.23 миллисекунды и обеспечивая пропускную способность в 6.75 кадров в секунду. Это позволяет системе оперативно реагировать на действия пользователя и обеспечивать взаимодействие в реальном времени. Применение стратегии Synth+Real, объединяющей синтетические и реальные данные для обучения, позволило значительно улучшить точность определения положения рук и их состояния контакта с объектами — прирост среднего значения точности (AP Hand+State) составил 6.12%. Такая комбинация скорости и точности открывает возможности для создания интеллектуальных систем, способных эффективно взаимодействовать с человеком в различных сценариях.
Исследование, представленное в данной работе, демонстрирует стремление к преодолению разрыва между синтетическими и реальными данными в области распознавания взаимодействия человека и объектов в промышленных условиях. Авторы предлагают инновационный подход, использующий диффузионные модели для генерации синтетических данных, что позволяет существенно расширить возможности обучения моделей, особенно в сценариях с ограниченным количеством размеченных данных. Как однажды заметил Джеффри Хинтон: «Принятие того, что мы не знаем, является первым шагом к обучению». Этот принцип находит отражение в подходе, предложенном в статье, где авторы признают трудности с получением достаточного количества размеченных данных в реальных промышленных условиях и активно используют синтетические данные для улучшения производительности модели GlovEgo-Net. Понимание закономерностей в визуальных данных, лежащее в основе GlovEgo-HOI, позволяет модели эффективно распознавать взаимодействие человека с объектами даже при использовании средств индивидуальной защиты.
Что дальше?
Представленная работа, безусловно, является шагом вперёд в автоматизации анализа взаимодействия человека и объектов в промышленной среде. Однако, иллюзия полного преодоления разрыва между синтетическим и реальным мирами — всего лишь иллюзия. Ошибки, аномалии в данных — это не помехи, а сигналы, указывающие на неполноту моделирования. Необходимо признать, что существующие генеративные модели, даже использующие диффузию, неизбежно упрощают сложность реальных сценариев. Не учтены тонкие нюансы освещения, вариативность текстур, непредсказуемость движений — всё это требует дальнейших исследований.
Перспективным направлением представляется не просто увеличение объёма синтетических данных, а разработка методов, позволяющих модели учиться на «негативных» примерах — на тех самых отклонениях, которые сейчас отбрасываются как шум. Возможно, стоит переосмыслить саму концепцию «аннотаций», отказавшись от жёсткой маркировки и перейдя к обучению с подкреплением, где модель сама исследует окружающую среду и выявляет закономерности.
В конечном счёте, задача автоматического анализа взаимодействия человека и объектов — это не просто техническая проблема, а философский вызов. Понимание системы требует не только сбора и обработки данных, но и способности видеть за ними скрытые зависимости, принимать неопределённость и признавать границы познания. Каждое «неудавшееся» взаимодействие — это возможность глубже понять принципы, управляющие сложными системами.
Оригинал статьи: https://arxiv.org/pdf/2601.09528.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Деформация сеток: новый подход на основе нейронных операторов
- Новые смартфоны. Что купить в марте 2026.
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- Ближний Восток и Рубль: Как Геополитика Перекраивает Российский Рынок (02.03.2026 20:32)
- vivo iQOO Z10x ОБЗОР: яркий экран, удобный сенсор отпечатков, объёмный накопитель
- Microsoft Edge позволяет воспроизводить YouTube в фоновом режиме на Android — подписка Premium не требуется.
- Российский рынок акций: нефть, ставки и дивиденды: что ждет инвесторов в ближайшее время? (05.03.2026 16:32)
- vivo X300 FE ОБЗОР: скоростная зарядка, беспроводная зарядка, плавный интерфейс
- Xiaomi Poco M7 ОБЗОР: плавный интерфейс, удобный сенсор отпечатков, большой аккумулятор
- Oppo Reno15 ОБЗОР: отличная камера, много памяти, скоростная зарядка
2026-01-15 23:46