Автор: Денис Аветисян
Новый подход объединяет графовые нейронные сети и предиктивное управление для эффективного контроля над высокоразмерными системами, такими как мягкие роботы.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"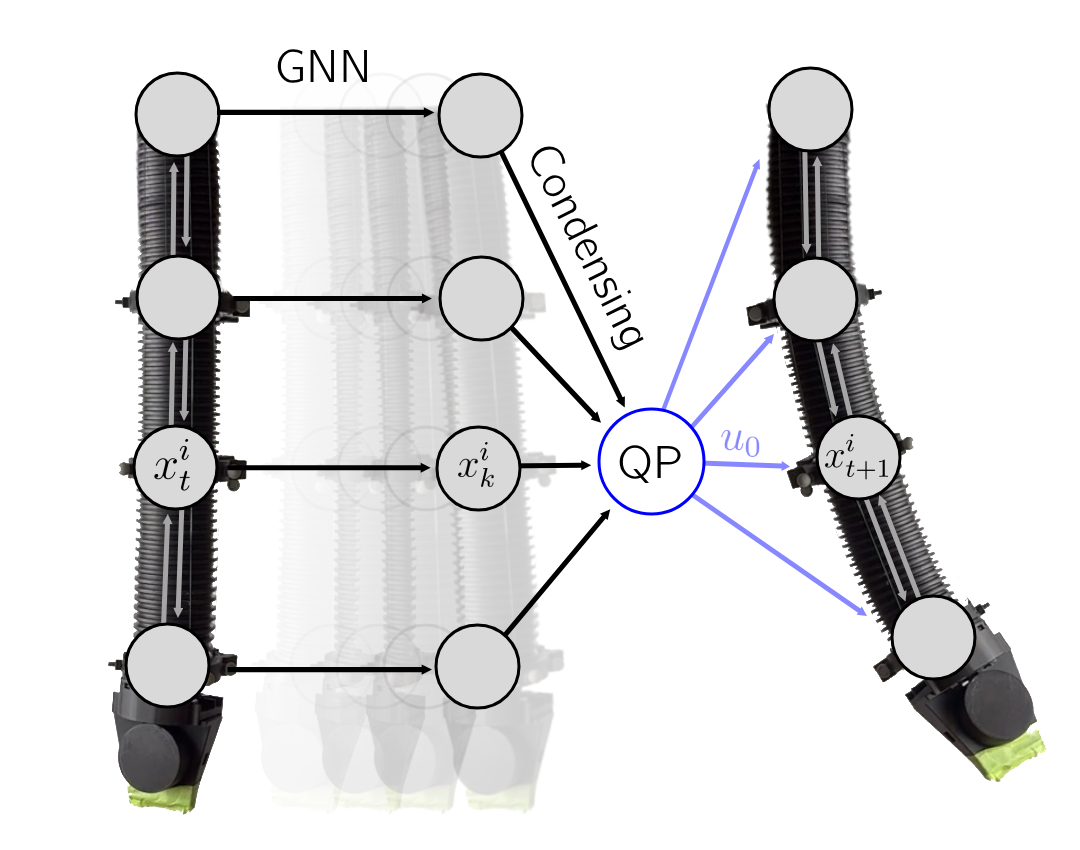
Предложен алгоритм, использующий структуру разреженности графовых нейронных сетей для масштабируемого управления в реальном времени.
Управление системами с высокой размерностью, такими как мягкие роботы, представляет собой сложную задачу из-за вычислительных ограничений при моделировании их сложной динамики. В данной работе, озаглавленной ‘Graph Neural Model Predictive Control for High-Dimensional Systems’, предложен новый подход, объединяющий графовые нейронные сети (GNN) и предсказательное управление моделью (MPC), что позволяет осуществлять управление в реальном времени. Ключевым элементом является алгоритм конденсации, использующий разреженность GNN для эффективного сокращения размерности решаемой задачи. Возможно ли дальнейшее масштабирование предложенного метода для управления еще более сложными системами и раскрытие новых горизонтов в области робототехники?
Нелинейная Динамика: Вызов для Моделирования
Эффективное управление сложными системами, такими как мягкие роботы, требует моделей, способных адекватно описывать нелинейную динамику. В отличие от простых систем, где линейные приближения могут быть достаточными, мягкие роботы, благодаря своей гибкой структуре и множеству степеней свободы, демонстрируют поведение, существенно отклоняющееся от линейности. Это означает, что даже небольшие изменения в начальных условиях могут привести к значительным различиям в конечном состоянии системы. Поэтому, для точного предсказания и контроля таких систем необходимы модели, способные улавливать эти нелинейные взаимосвязи и учитывать их влияние на динамику. Отсутствие адекватного моделирования нелинейностей ограничивает возможности реализации сложных задач, требующих высокой точности и стабильности, и препятствует полному раскрытию потенциала мягких роботизированных систем.
Традиционные методы моделирования динамических систем, особенно в контексте управления сложными объектами вроде мягких роботов, часто сталкиваются с существенными ограничениями, обусловленными высокой размерностью пространства состояний и связанными с этим вычислительными затратами. По мере увеличения числа степеней свободы системы, необходимое количество вычислений для прогнозирования её поведения экспоненциально возрастает, что делает невозможным применение этих методов в задачах, требующих управления в реальном времени. Эта проблема особенно актуальна для систем с нелинейной динамикой, где линейные приближения оказываются неадекватными, а более точные методы требуют еще больше вычислительных ресурсов. В результате, существующие подходы часто вынуждены жертвовать точностью ради скорости, что ограничивает возможности эффективного контроля и адаптации к изменяющимся условиям окружающей среды.
Точное предсказание будущих состояний системы является ключевым фактором для эффективного управления, однако остается значительным препятствием во многих областях применения. Представленные исследования демонстрируют, что разработанный подход к предсказанию демонстрирует сравнимую с моделями на основе оператора Купмана точность, измеряемую как среднеквадратичная ошибка (RMSE). При этом, в сравнении с другими широко используемыми методами, такими как модели состояний пространства (SSM) и многослойные персептроны (MLP), достигнута более высокая точность прогнозирования. Это позволяет значительно улучшить контроль над сложными системами и открывает новые возможности для их применения в робототехнике и других областях, требующих надежного и точного управления.
Графовые Нейронные Сети: Локальные Взаимодействия как Ключ к Эффективности
В рамках предлагаемого подхода динамика робота моделируется с использованием графовых нейронных сетей (GNN), что основано на предположении о локализованности взаимодействий между элементами системы. GNN позволяют представить робота как граф, где узлы соответствуют отдельным частям робота, а ребра — связям между ними. При этом, вычисления выполняются локально для каждого узла, учитывая информацию только от его непосредственных соседей. Это позволяет эффективно моделировать сложные системы, избегая необходимости учитывать все возможные взаимодействия, и снижает вычислительную сложность за счет использования принципа локальности при распространении информации по графу.
Использование графовых нейронных сетей (GNN) позволяет получить структурированное представление динамики робота, что упрощает процесс моделирования и снижает вычислительную сложность. Вместо работы с полным пространством состояний, GNN оперируют с локальными связями между узлами графа, представляющими части робота. Это приводит к уменьшению количества параметров, необходимых для обучения модели, и, следовательно, к сокращению времени вычислений и требований к памяти. Такой подход особенно эффективен для систем со сложной кинематикой и большим количеством степеней свободы, где традиционные методы моделирования могут быть вычислительно затратными и требовать значительных усилий по настройке.
Использование локальных взаимодействий в графовых нейронных сетях (ГНС) позволяет эффективно моделировать динамику робота без потери точности. Вместо рассмотрения глобальных связей между всеми узлами графа, ГНС фокусируются на взаимодействиях в пределах ограниченного соседства каждого узла. Это значительно снижает вычислительную сложность, поскольку количество операций пропорционально количеству связей в локальном окружении, а не общему числу связей в графе. Такой подход позволяет выделить существенные динамические характеристики системы, избегая избыточности и шума, возникающих при анализе глобальных взаимодействий. Практически это реализуется путем агрегации информации от ближайших соседей каждого узла и использования этой агрегированной информации для обновления состояния узла.
Снижение Размерности для Оптимизации в Реальном Времени: Искусство Эффективного Управления
Для обеспечения оптимизации в реальном времени применяется алгоритм конденсации, предназначенный для дальнейшего снижения размерности задачи управления. Данный алгоритм выполняет отбор наиболее значимых состояний и управляющих воздействий, основываясь на анализе чувствительности системы. В результате, размерность пространства управления уменьшается, что позволяет сократить вычислительные затраты и повысить частоту обновления управляющих сигналов. Это особенно важно для систем с большим числом степеней свободы, где традиционные методы управления могут оказаться вычислительно неэффективными. Алгоритм конденсации позволяет эффективно управлять сложными системами, сохраняя при этом необходимую точность и стабильность.
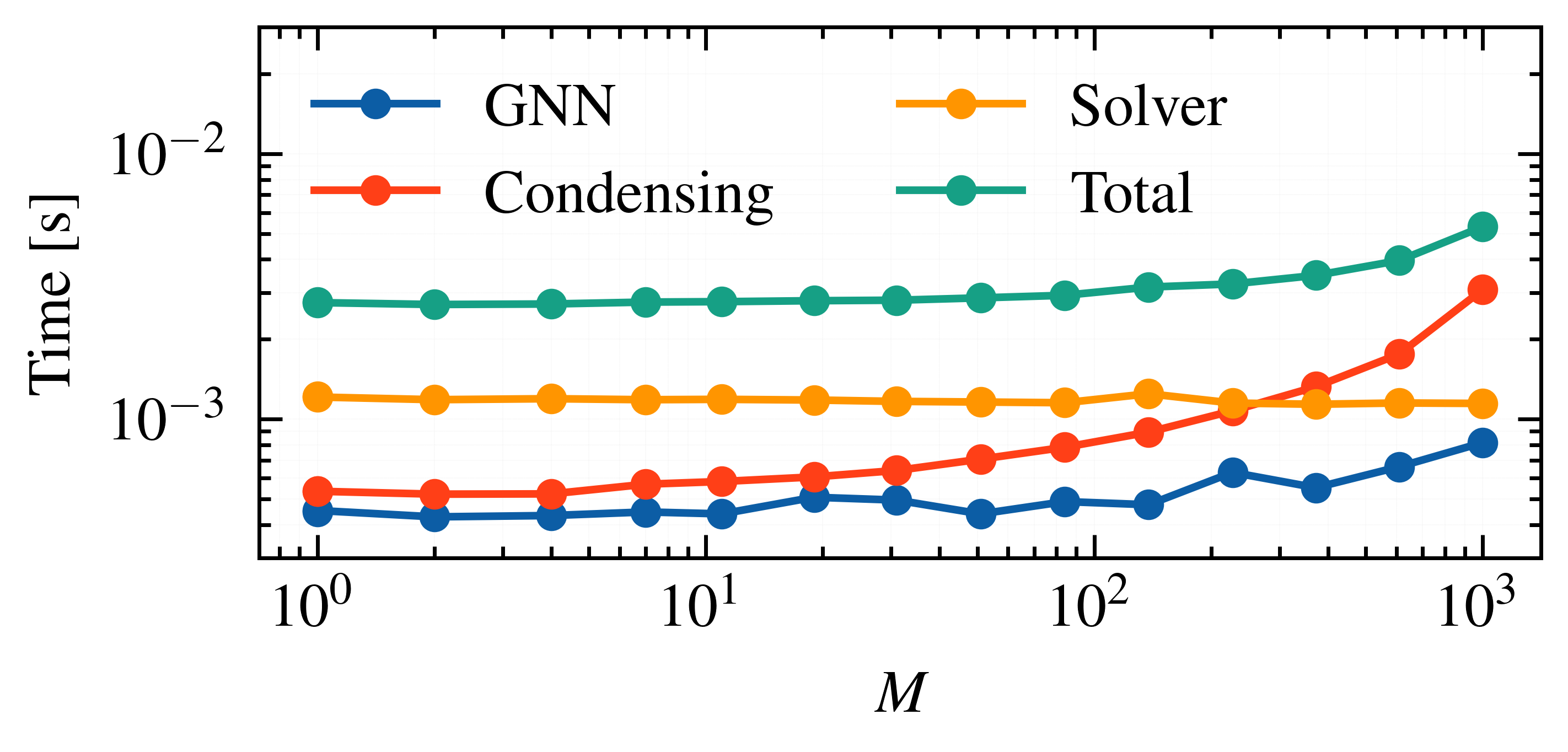
Алгоритм использует разреженную структуру, присущую линеаризованной динамике, полученной от графовой нейронной сети (GNN), что существенно снижает вычислительные затраты. Линеаризация динамики позволяет представить систему в виде разреженной матрицы, где большинство элементов равны нулю. Обработка только ненулевых элементов значительно уменьшает объем вычислений, необходимых для решения задач оптимизации и управления. Этот подход особенно эффективен для больших графовых систем, где степень разреженности матрицы может быть высокой, что приводит к существенному ускорению работы алгоритма и снижению требований к вычислительным ресурсам.
Полученная модель демонстрирует линейную зависимость вычислительной сложности от количества узлов графа, что обеспечивает эффективное управление системами возрастающей сложности. Экспериментально подтверждена возможность поддержания стабильной частоты управления в 100 Гц для систем, содержащих до 1000 узлов. Это означает, что время вычислений для каждого шага управления увеличивается пропорционально количеству узлов, что позволяет масштабировать алгоритм для более крупных и сложных систем без существенного снижения производительности.
Аппаратная Валидация и Надежная Производительность: От Модели к Реальности
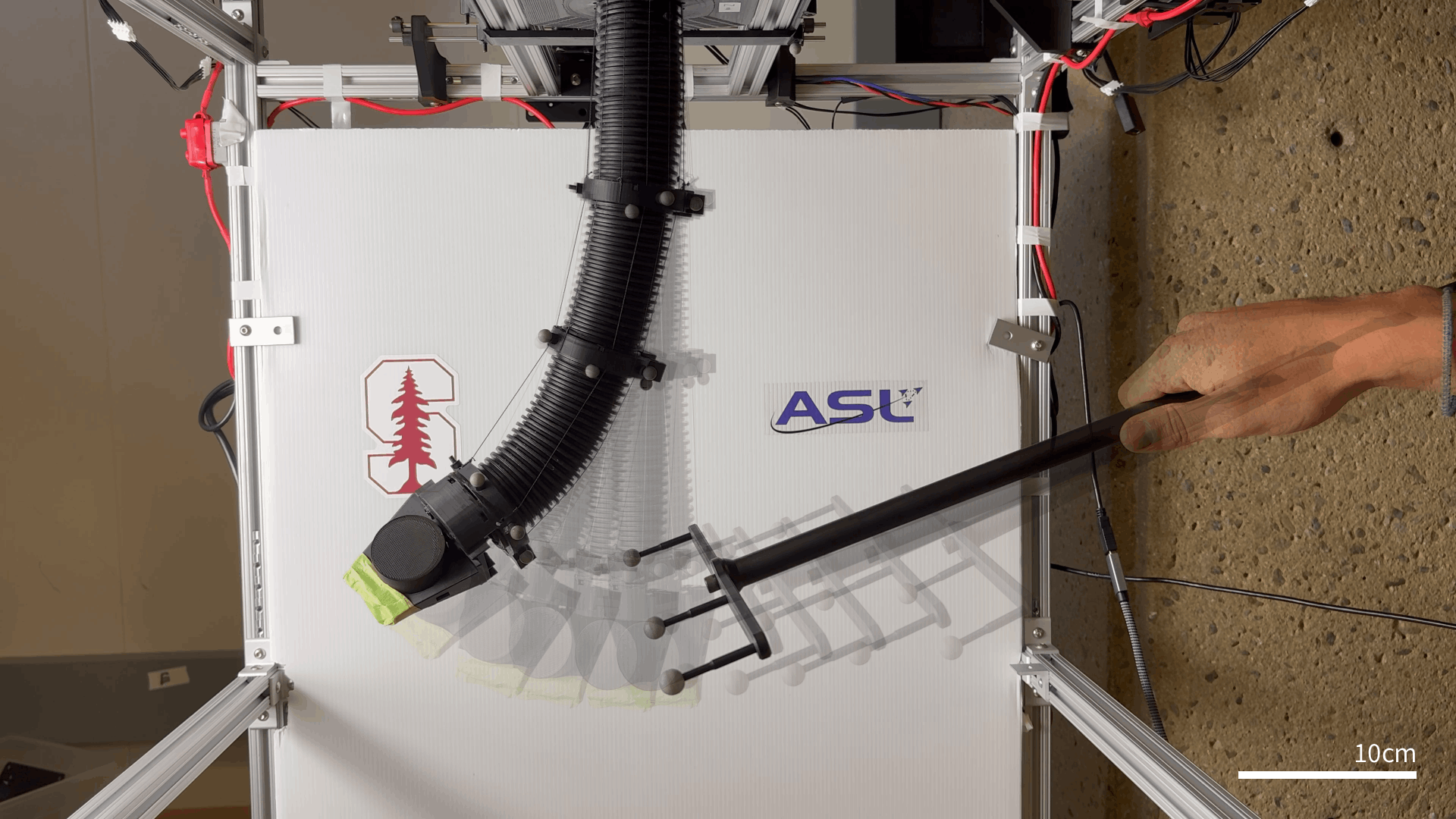
Для подтверждения работоспособности предложенной системы управления были проведены аппаратные эксперименты на тендоно-приводном роботизированном торсе. В ходе испытаний робот продемонстрировал способность к эффективному управлению в реальных условиях, что позволило оценить практическую применимость разработанного алгоритма. Аппаратная реализация и тестирование позволили выявить и устранить потенциальные недостатки, обеспечив надежность и стабильность функционирования системы управления в физическом воплощении робота. Полученные результаты подтверждают, что предложенный подход к управлению может быть успешно реализован на мягких роботизированных системах, открывая возможности для создания более адаптивных и безопасных роботов.
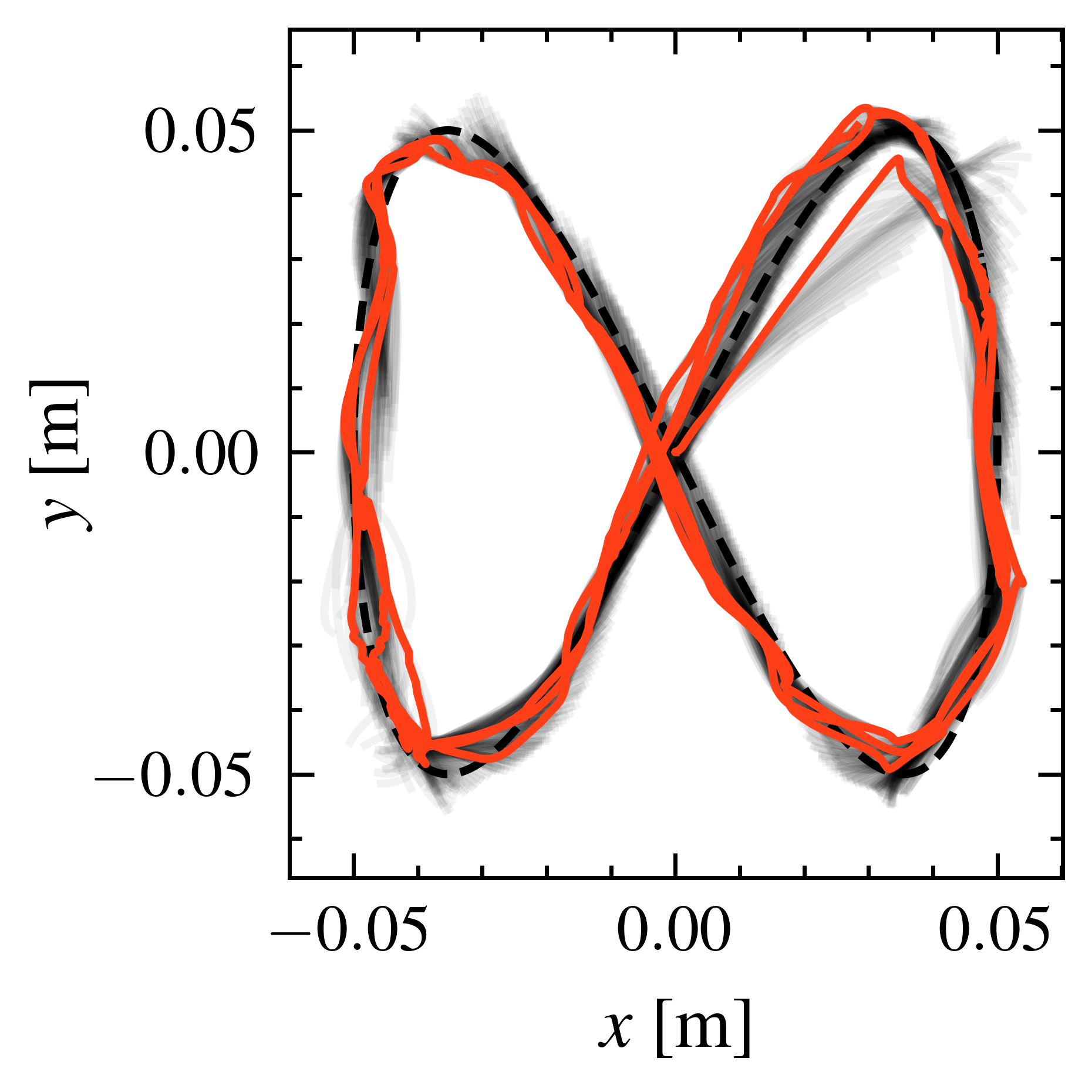
Роботизированный торс, приводимый в действие сухожилиями, успешно продемонстрировал способность обходить препятствия, что подтверждает эффективность разработанной системы управления в условиях, приближенных к реальным. Испытания показали, что робот способен автономно реагировать на неожиданные помехи и изменять траекторию движения для избежания столкновений. Данный результат свидетельствует о надежности предложенного подхода и его потенциале для применения в сложных, динамичных средах, где требуется адаптивность и устойчивость к внешним воздействиям. Способность к обходу препятствий является ключевым показателем функциональности и открывает возможности для использования робота в различных областях, требующих безопасного и эффективного взаимодействия с окружением.
Данные, полученные с помощью системы захвата движения, подтвердили высокую точность разработанной модели и эффективность предложенной стратегии управления в динамичной среде. Эксперименты на физическом прототипе мягкого роботизированного торса продемонстрировали значительное снижение ошибки отслеживания траектории — на 63.6% по сравнению с базовыми методами. Такое существенное улучшение свидетельствует о способности системы адаптироваться к реальным условиям и обеспечивать стабильное и точное управление даже в сложных ситуациях, открывая перспективы для применения данной разработки в широком спектре задач, требующих гибкости и надежности.
Данная работа демонстрирует подход к управлению высокоразмерными системами, в частности, мягкими роботами, посредством интеграции графовых нейронных сетей и предиктивного управления. Особое внимание уделяется алгоритму конденсации, использующему разреженную структуру графовых сетей для повышения эффективности. Это напоминает высказывание Эдсгера Дейкстры: «Программирование — это не столько создание программ, сколько решение проблем». Подобно тому, как программист сталкивается со сложностью задач, данное исследование предлагает элегантное решение проблемы управления системами с высокой степенью сложности, используя возможности графовых сетей для упрощения и ускорения процесса принятия решений. Алгоритм конденсации, как ключевой элемент предложенного подхода, позволяет эффективно справляться с вычислительной нагрузкой, что особенно важно для систем реального времени.
Что дальше?
Представленный подход, интегрирующий графовые нейронные сети с управлением на основе модели, безусловно, открывает новые возможности для работы с системами высокой размерности. Однако, как и всегда, истинный вызов заключается не в создании инструмента, а в понимании границ его применимости. Алгоритм сжатия, хоть и эффективный, все же предполагает определенную разреженность графа. Что произойдет, если система окажется плотно связанной, если ее внутренние взаимодействия не поддаются столь простому представлению? Игнорирование этих связей — это ли не самообман, попытка упростить реальность до удобной модели?
Следующим шагом представляется не просто увеличение вычислительной мощности или усложнение архитектуры сети, а углубленное исследование динамики самих графов. Возможно ли создать систему, способную динамически адаптировать структуру графа в процессе работы, отражая меняющиеся взаимосвязи внутри системы? Или, что еще более радикально, создать алгоритм, способный полностью отказаться от графового представления, обнаружив более естественный способ моделирования высокоразмерных взаимодействий?
В конечном счете, задача управления сложными системами — это не столько вопрос разработки алгоритмов, сколько вопрос понимания самой реальности. Если система не поддается взлому, если ее логика остается непрозрачной, значит, истинное знание еще не достигнуто. И именно в этом поиске, в постоянном стремлении к реверс-инжинирингу действительности, и заключается истинная ценность любого научного исследования.
Оригинал статьи: https://arxiv.org/pdf/2602.17601.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- МосБиржа в ожидании прорыва: Анализ рынка, рубля и инфляционных рисков (16.02.2026 23:32)
- Infinix Note 60 ОБЗОР: плавный интерфейс, беспроводная зарядка, яркий экран
- Практический обзор OnePlus OxygenOS 15
- Российский рынок: Инфляция, ставки и «Софтлайн» — что ждет инвесторов? (19.02.2026 14:32)
- Неважно, на что вы фотографируете!
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- Honor X70 ОБЗОР: объёмный накопитель, беспроводная зарядка, скоростная зарядка
- Лучшие смартфоны. Что купить в феврале 2026.
- Microsoft запускает Mixed Reality Link для Windows 11 — подключите свой компьютер к гарнитуре Meta Quest!
- Искусство плакатов: новый уровень генерации с помощью ИИ
2026-02-21 04:41