Автор: Денис Аветисян
Новая разработка позволяет управлять беспилотными летательными аппаратами с помощью жестов, используя носимую перчатку с инерциальным измерительным блоком.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"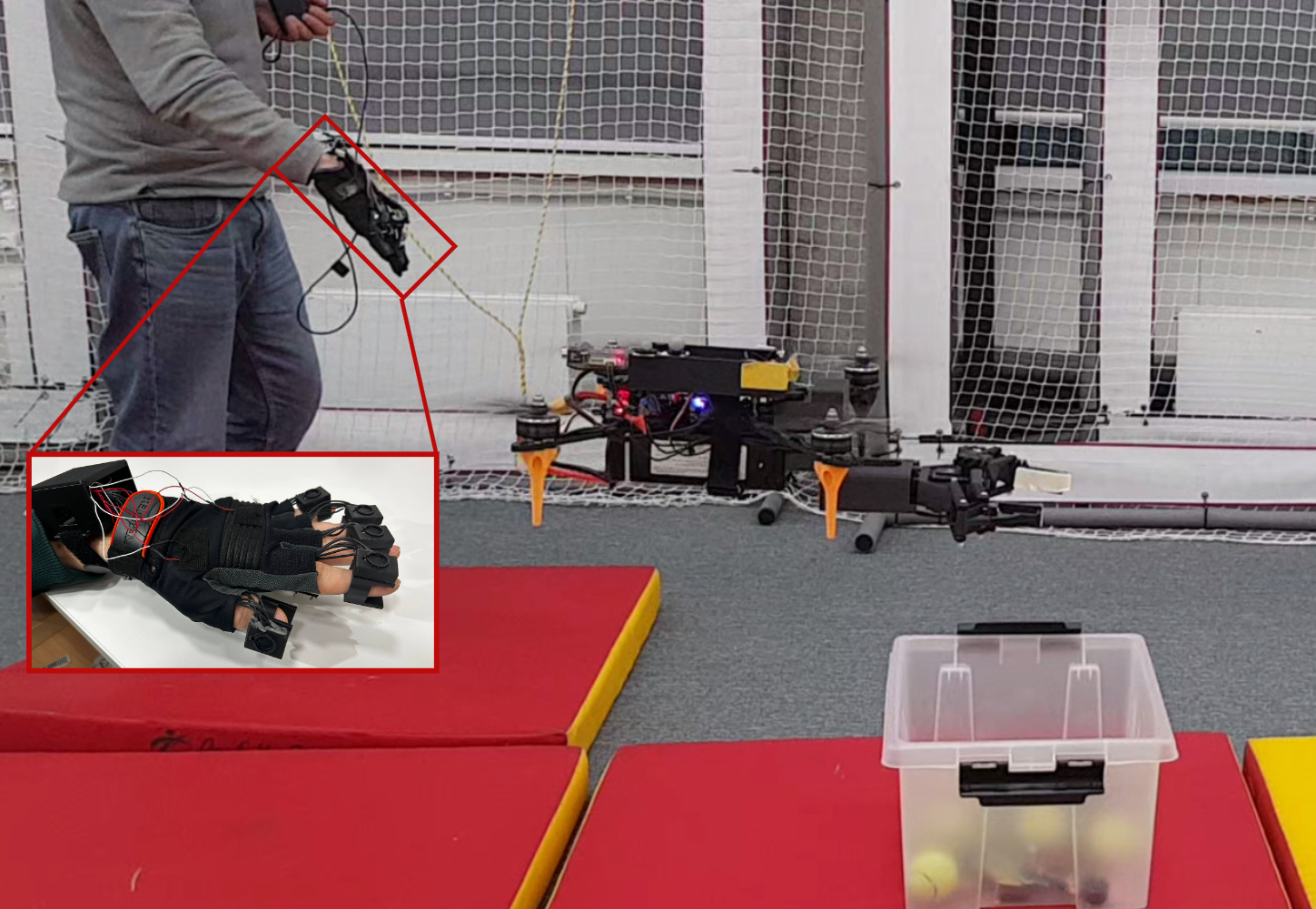
Представлена носимая перчатка на основе IMU для интуитивного управления БПЛА с использованием распознавания жестов и вибротактильной обратной связи.
Несмотря на растущую популярность беспилотных летательных аппаратов, интуитивное и безопасное управление ими остается сложной задачей. В данной работе представлена система ‘Glove2UAV: A Wearable IMU-Based Glove for Intuitive Control of UAV’, представляющая собой носимый перчаточный интерфейс на основе инерциальных измерительных блоков (IMU) для управления БПЛА посредством жестов рук и пальцев, дополненный вибротактильной обратной связью для предупреждения о превышении установленных пороговых значений скорости. Предложенное решение обеспечивает быструю реакцию на команды и стабильную связь между движениями оператора и динамикой платформы, повышая осведомленность и уверенность пилота. Каковы перспективы расширения функциональности и повышения надежности подобных носимых интерфейсов для управления робототехническими системами в различных условиях эксплуатации?
Интуитивное управление: Новый взгляд на беспилотные системы
Традиционные методы управления беспилотными летательными аппаратами (БПЛА) зачастую связаны со сложными интерфейсами и требуют длительного обучения операторов. Это обусловлено необходимостью освоения множества кнопок, рычагов и программных настроек, что значительно ограничивает доступность БПЛА для широкого круга пользователей. Освоение таких систем требует времени и усилий, а высокая сложность может приводить к ошибкам и снижать эффективность работы. В результате, потенциальные преимущества БПЛА — от сельского хозяйства до поисково-спасательных операций — остаются недоступными для тех, кто не обладает специализированными навыками, что создает барьер для широкого внедрения этой технологии.
Управление с помощью жестов представляет собой принципиально новый подход к взаимодействию с роботизированными системами, стремящийся воспроизвести естественные навыки манипулирования, присущие человеку. Вместо сложных интерфейсов и длительного обучения, оператор может интуитивно управлять беспилотным летательным аппаратом (БПЛА) посредством простых движений рук и тела. Этот метод использует врожденную способность человека понимать и интерпретировать пространственные данные, позволяя формировать команды для БПЛА таким же образом, как человек манипулирует предметами в реальном мире. Исследования показывают, что подобный интерфейс снижает когнитивную нагрузку и ускоряет процесс обучения, делая управление БПЛА более доступным и эффективным для широкого круга пользователей, даже без специальной подготовки.
Исследования показывают, что использование жестов для управления беспилотными летательными аппаратами (БПЛА) способно значительно повысить эффективность работы оператора и снизить когнитивную нагрузку. В отличие от традиционных методов, требующих освоения сложных интерфейсов и длительного обучения, управление жестами имитирует естественные манипуляции, позволяя оператору интуитивно контролировать БПЛА. Это приводит к ускорению времени реакции, уменьшению количества ошибок и снижению умственного напряжения, особенно в ситуациях, требующих высокой концентрации и быстрого принятия решений. Такой подход открывает возможности для более широкого применения БПЛА в различных сферах, включая поисково-спасательные операции, мониторинг окружающей среды и инспекцию инфраструктуры, где важна скорость и точность управления.
Перчатка и датчики: Основа точного отслеживания
В основе системы используется перчатка, оснащенная инерциальными измерительными блоками (IMU). Эти IMU содержат акселерометры и гироскопы, позволяющие с высокой точностью отслеживать положение и ориентацию кисти и каждого пальца в пространстве. Акселерометры измеряют линейное ускорение, а гироскопы — угловую скорость. Комбинируя данные от обоих типов датчиков, система способна регистрировать даже незначительные движения и изменения в положении руки, обеспечивая детальное отслеживание динамики руки и пальцев.
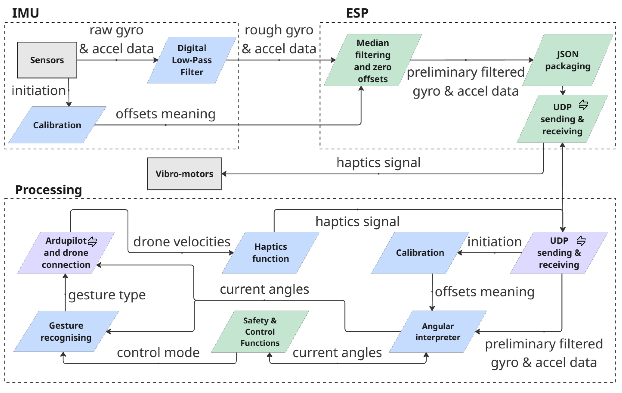
Микроконтроллер ESP32 выполняет первичную обработку сырых данных, поступающих с инерциальных измерительных блоков (IMU). Этот процесс включает в себя цифровую фильтрацию для снижения шума и повышения точности измерений, а также преобразование данных в формат, пригодный для беспроводной передачи. В частности, применяются фильтры Калмана или комплементарные фильтры для объединения данных с акселерометров, гироскопов и магнитометров, что позволяет получить более стабильные и точные показания ориентации и движения руки. Подготовленные данные затем структурируются в пакеты для последующей передачи по протоколу UDP.
Для обеспечения быстрой и надежной передачи данных с перчатки к центральному процессору используется протокол UDP. В отличие от TCP, UDP не требует установления соединения и подтверждения получения каждого пакета, что существенно снижает задержки. Несмотря на отсутствие гарантии доставки каждого пакета, в контексте отслеживания движений рук, незначительная потеря данных компенсируется высокой частотой обновления и использованием алгоритмов интерполяции на стороне центрального процессора. Протокол UDP обеспечивает минимальную нагрузку на сеть и позволяет достичь частоты передачи данных, необходимой для точного и оперативного захвата движений.

Оценка ориентации: Алгоритмы фильтрации и выравнивания
Для минимизации шумов и дрейфа в данных, получаемых от инерциального измерительного модуля (IMU), применяется комбинация фильтров. Median Filter используется для удаления импульных помех, эффективно подавляя выбросы в данных акселерометра и гироскопа. Complementary Filter объединяет данные акселерометра и гироскопа, используя преимущества каждого: акселерометр обеспечивает стабильное, но зашумленное измерение угла, а гироскоп — точное, но подверженное дрейфу. Madgwick Filter представляет собой более сложный алгоритм, основанный на кватернионах, который обеспечивает более точную и стабильную оценку ориентации, эффективно комбинируя данные всех сенсоров и минимизируя ошибки, возникающие при использовании отдельных фильтров.
Для обеспечения долгосрочной точности распознавания жестов реализована процедура Zero-Back Alignment. Данный алгоритм непрерывно корректирует опорную позу, компенсируя накопленные ошибки, вызванные дрейфом датчиков и внешними факторами. Zero-Back Alignment работает путем периодической калибровки ориентации относительно начальной (нулевой) позы, что позволяет минимизировать отклонения и поддерживать стабильность оценки ориентации руки на протяжении длительного времени. Эффективность данной процедуры критически важна для приложений, требующих высокой точности и надежности отслеживания движений, таких как управление устройствами или взаимодействие с виртуальной реальностью.
Для обеспечения точного управления и стабильной работы системы, алгоритмы фильтрации — Медианный фильтр, Дополнительный фильтр и фильтр Madgwick — применяются совместно. Медианный фильтр снижает влияние выбросов, в то время как Дополнительный и фильтр Madgwick комбинируют данные акселерометра и гироскопа для минимизации дрейфа и повышения точности оценки ориентации руки в пространстве. Такая совместная работа позволяет достичь высокой надежности и стабильности оценки, что критически важно для прецизионного управления и корректного распознавания жестов в динамических сценариях.
Бесшовное управление: От жеста к действию дрона
Управление на основе жестов позволяет операторам интуитивно командовать БПЛА посредством естественных движений рук. Данный метод использует данные, полученные с IMU-перчатки, для интерпретации намерений оператора, преобразуя их в команды управления для БПЛА. Это обеспечивает более прямой и естественный интерфейс управления по сравнению с традиционными методами, использующими джойстики или клавиатуру. Система распознавания жестов позволяет оператору управлять движением БПЛА, направлением полета и другими функциями, используя лишь естественные движения кисти и пальцев, что значительно упрощает процесс управления и снижает когнитивную нагрузку.
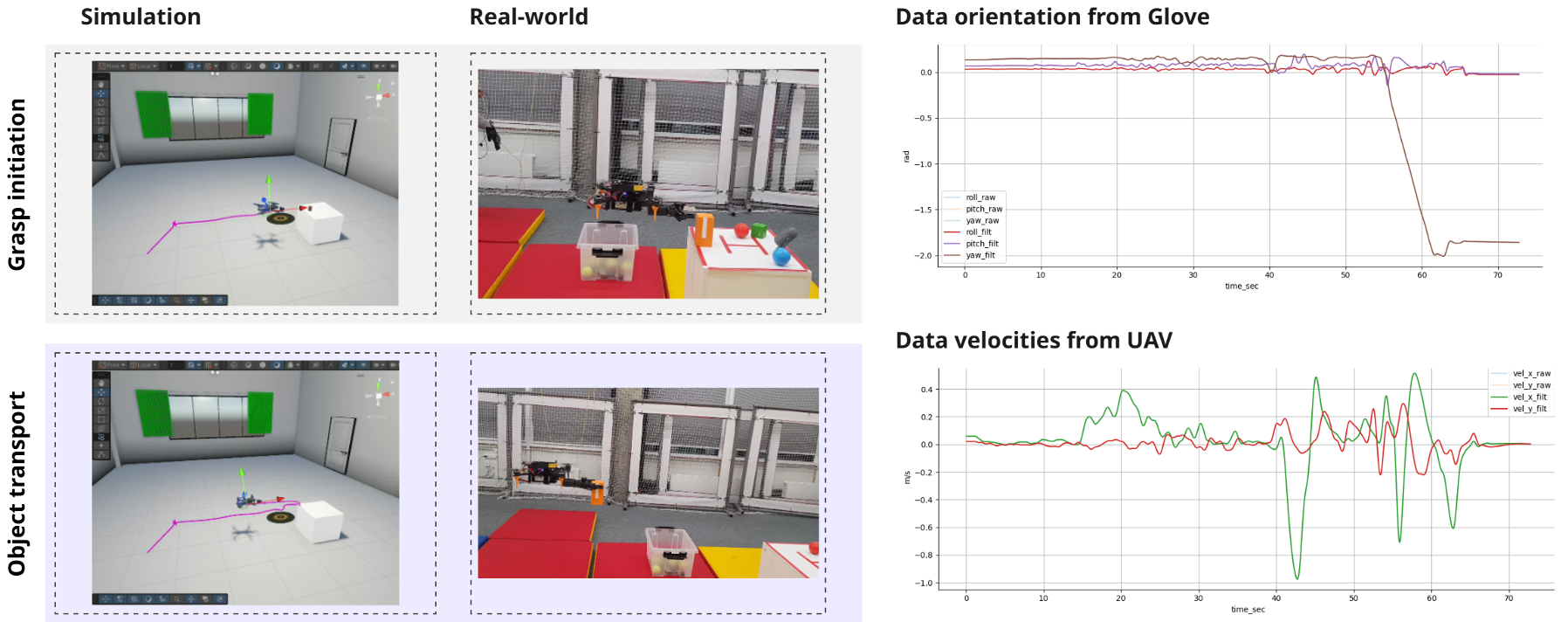
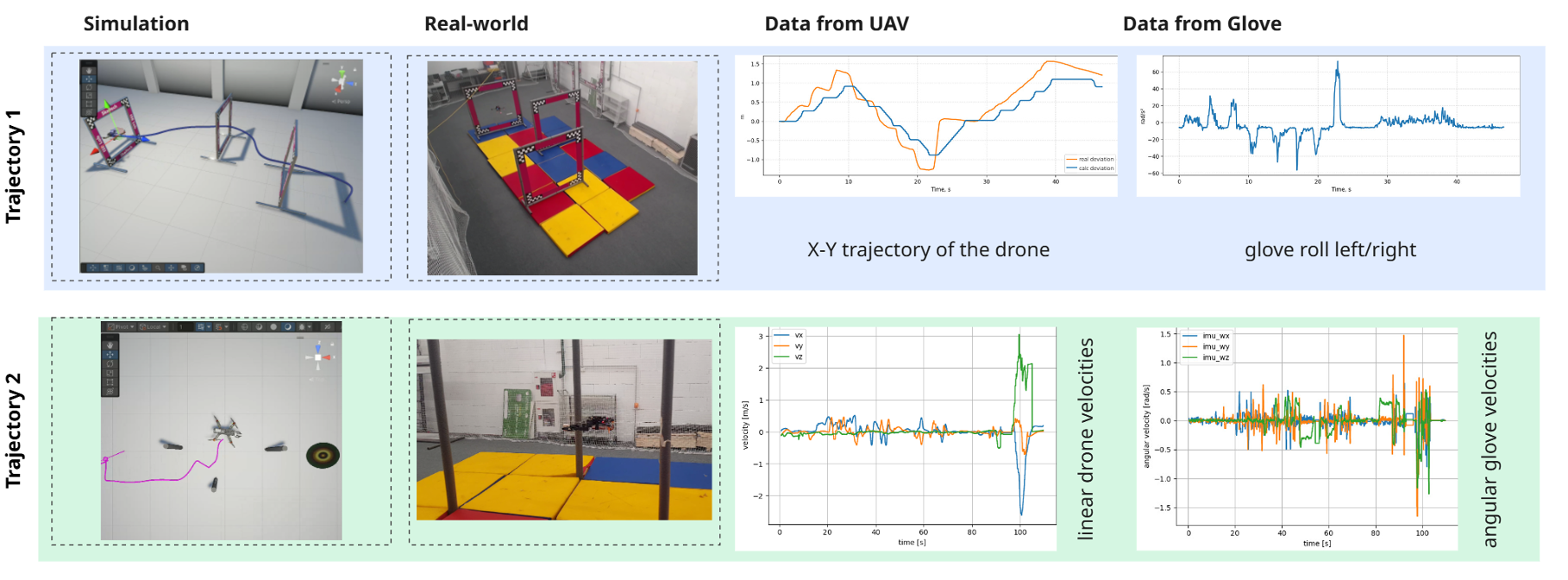
Управление по траектории позволяет оператору направлять БПЛА по желаемому пути с использованием перчатки с инерциальным измерительным блоком (IMU). Перчатка отслеживает движения руки оператора, которые напрямую транслируются в команды управления БПЛА, обеспечивая непосредственный и интуитивно понятный опыт взаимодействия. Такой подход позволяет оператору “вести” БПЛА вдоль заданной траектории, словно физически направляя его в пространстве, что повышает эффективность и удобство управления, особенно в сложных или ограниченных условиях.
Управление захватом объектов осуществляется посредством специфических жестов, позволяющих БПЛА взаимодействовать с объектами с использованием манипулятора-захвата. Реализованная система позволяет оператору передавать команды на активацию захвата и управления им посредством заранее определенных движений руки, что обеспечивает возможность точного позиционирования и удержания объектов БПЛА. Специальные жесты активируют механизм захвата, позволяя БПЛА подхватывать, перемещать и размещать объекты в соответствии с командами оператора.
Для обеспечения высокой точности управления БПЛА во время выполнения сложных маневров реализована процедура «блокировки пальца». Данная процедура временно отключает распознавание жестов, предотвращая случайные команды и позволяя оператору выполнять точные корректировки положения и ориентации БПЛА без нежелательных помех со стороны системы управления жестами. Отключение происходит по определенному сигналу от перчатки IMU и автоматически восстанавливается после завершения маневра, возвращая управление БПЛА в режим распознавания жестов.
Для оценки стабильности и воспроизводимости системы управления беспилотным летательным аппаратом (БПЛА) были проведены эксперименты, включающие в себя пять повторений для каждого из двух этапов исследования — Эксперимента 1 и Эксперимента 2. Данное количество повторений было выбрано для обеспечения статистической значимости полученных результатов и выявления возможных отклонений в работе системы управления при различных условиях эксплуатации. Анализ данных, полученных в ходе этих повторений, позволил оценить консистентность реакций БПЛА на одни и те же управляющие воздействия и определить надежность системы в целом.
Интеграция и перспективы: Будущее интуитивного управления
В основе взаимодействия между перчаткой, отслеживающей движения, и беспилотным летательным аппаратом (БПЛА) лежит операционная система роботов (ROS), выступающая в роли надежного коммуникационного каркаса. ROS обеспечивает беспрепятственный обмен данными между инерциальным измерительным блоком (IMU) перчатки и системами управления БПЛА, позволяя преобразовывать жесты оператора в команды для аппарата в реальном времени. Эта архитектура позволяет не только передавать данные о положении и ориентации руки, но и интегрировать различные типы сенсорной информации, необходимые для точного управления БПЛА. Благодаря ROS, система демонстрирует высокую гибкость и масштабируемость, что открывает возможности для интеграции с другими робототехническими компонентами и развития более сложных систем управления.
Вибротактильная обратная связь значительно улучшает взаимодействие человека с роботом, предоставляя операторам интуитивно понятные сигналы, которые дополняют визуальный контроль. В ходе исследований было показано, что использование тактильных ощущений позволяет оператору более точно и уверенно управлять беспилотным летательным аппаратом, особенно в сложных условиях или при ограниченной видимости. Данная технология позволяет переводить данные о состоянии дрона, такие как угол наклона, скорость и приближение к препятствиям, в ощутимые вибрации на перчатке, что снижает когнитивную нагрузку и повышает общее чувство контроля. Это, в свою очередь, приводит к увеличению скорости реакции и снижению вероятности ошибок при выполнении задач, что особенно важно в критических ситуациях.
Представленная система демонстрирует значительный потенциал в создании более интуитивных и доступных интерфейсов управления робототехникой. Вместо сложных команд и многочисленных настроек, оператор получает возможность управлять беспилотным летательным аппаратом посредством естественных жестов, интерпретируемых перчаткой с инерциальными датчиками. Такой подход значительно снижает когнитивную нагрузку, позволяя сосредоточиться на самой задаче, а не на механике управления. Возможность получения тактильной обратной связи усиливает эффект присутствия и повышает уверенность оператора в точности выполняемых команд. В перспективе, подобные системы могут найти широкое применение в различных областях, включая поисково-спасательные операции, дистанционное обслуживание оборудования и даже в сфере развлечений, делая робототехнику более понятной и доступной для широкой аудитории.
В дальнейшем планируется значительно расширить набор распознаваемых жестов, что позволит оператору управлять дроном более интуитивно и эффективно. Параллельно с этим, ведется интеграция передовых алгоритмов искусственного интеллекта, направленная на повышение автономности системы. Это включает в себя разработку алгоритмов, способных предсказывать намерения оператора на основе анализа жестов и окружающей обстановки, а также самостоятельно корректировать траекторию полета и выполнять сложные задачи. Такой симбиоз человеческого контроля и машинного интеллекта откроет новые возможности для применения дронов в различных сферах, от поисково-спасательных операций до промышленной инспекции, обеспечивая более безопасное и эффективное взаимодействие между человеком и роботом.
В ходе экспериментов использовались два беспилотных летательных аппарата (БПЛА) различной конструкции. Первый БПЛА, участвовавший в эксперименте 1, обладал 6 степенями свободы, что обеспечивало ему маневренность в пространстве. Во втором эксперименте применялся более сложный БПЛА, оснащенный манипулятором, — его возможности были расширены до 7 степеней свободы. Увеличение числа степеней свободы позволило реализовать более сложные задачи, включая захват и перемещение объектов, демонстрируя потенциал системы для управления БПЛА с расширенным функционалом и повышенной точностью.
Исследование, представленное в данной работе, стремится к упрощению взаимодействия человека с беспилотными летательными аппаратами. Авторы предлагают изящное решение — перчатку, основанную на инерциальных измерительных блоках, для интуитивного управления. Это не просто технологический прогресс, а шаг к повышению безопасности и осознанности оператора. Как однажды заметил Джон Маккарти: «Все программы должны быть написаны на языке, который понятен оператору». Подобный подход к управлению, основанный на естественных жестах и тактильной обратной связи, соответствует принципу ясности, заложенному в основу данной разработки, делая управление БПЛА более доступным и эффективным.
Куда же дальше?
Представленная работа, освободившись от избыточности многих предшествующих подходов, обнажает суть проблемы: не в сложности управления, а в недостатке естественного, интуитивного интерфейса. Перспективы, однако, не сводятся к простому увеличению количества датчиков или усложнению алгоритмов распознавания жестов. Истинное продвижение лежит в плоскости понимания — понимания того, как человеческий мозг интерпретирует сенсорные данные и формирует намерение. Вибрационная обратная связь — это лишь первый, грубый шаг к созданию полноценной сенсорной петли.
Очевидным ограничением остается зависимость от точности распознавания жестов в реальном времени. Стремление к идеальной точности — иллюзия. Более продуктивным представляется поиск методов, позволяющих системе не просто распознавать жест, а понимать намерение оператора, даже при неполных или неверных данных. Это потребует интеграции с моделями предсказания поведения, основанными на контексте и истории взаимодействия.
В конечном счете, вопрос заключается не в том, чтобы заставить машину следовать командам, а в создании симбиоза, в котором оператор и машина дополняют друг друга. Именно эта простота, достигнутая путем удаления всего лишнего, и является истинной целью. Отказ от избыточности — это не смирение с ограничениями, а признание красоты лаконичности.
Оригинал статьи: https://arxiv.org/pdf/2601.15775.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Деформация сеток: новый подход на основе нейронных операторов
- Новые смартфоны. Что купить в марте 2026.
- Российский рынок акций: нефть, ставки и дивиденды: что ждет инвесторов в ближайшее время? (05.03.2026 16:32)
- Лучшие смартфоны. Что купить в марте 2026.
- vivo iQOO Z10x ОБЗОР: яркий экран, удобный сенсор отпечатков, объёмный накопитель
- Нефть и бриллианты лидируют: обзор воскресных торгов на «СПБ Бирже» (08.03.2026 16:32)
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- Ближний Восток и Рубль: Как Геополитика Перекраивает Российский Рынок (02.03.2026 20:32)
- Oppo Reno15 ОБЗОР: отличная камера, много памяти, скоростная зарядка
- Неважно, на что вы фотографируете!
2026-01-24 14:57