Автор: Денис Аветисян
Разработана компактная и доступная система ACE-F, позволяющая интуитивно управлять роботами различной конструкции с обратной тактильной связью.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
Система ACE-F использует сенсорную обратную связь и обратную кинематику для точного и удобного телеуправления роботами с различной морфологией.
Несмотря на важность телеоператорских систем для сбора данных и обучения роботов, существующие платформы часто страдают от отсутствия тактильной обратной связи, универсальности и удобства использования. В данной работе представлена система ‘ACE-F: A Cross Embodiment Foldable System with Force Feedback for Dexterous Teleoperation’ — компактное и переносное решение, обеспечивающее точное управление роботами различной конструкции посредством инновационной системы виртуальной тактильной обратной связи и обратной кинематики. Предложенный подход значительно упрощает контроль над роботами, делая сложные манипуляции интуитивно понятными, как работа с компьютерной мышью. Возможно ли дальнейшее развитие подобных систем для создания полностью автономных роботов, способных к сложным взаимодействиям с окружающей средой?
Преодолевая Ограничения Традиционного Телеуправления
Традиционные методы телеуправления, такие как прямое копирование движений суставов, зачастую оказываются неэффективными при работе с роботами различной конструкции и выполнении сложных задач. Суть проблемы заключается в том, что эти системы предполагают жесткую привязку между движениями оператора и робота, что не позволяет учитывать различия в кинематике и динамике робототехнических платформ. Например, движение, естественное для человеческой руки, может оказаться неудобным или даже невозможным для робота с иным количеством степеней свободы или иной геометрией. Кроме того, прямое копирование не учитывает особенности конкретной задачи, что приводит к снижению производительности и увеличению нагрузки на оператора, особенно при выполнении операций, требующих высокой точности или координации нескольких роботов.
Существующие системы дистанционного управления зачастую демонстрируют недостаточную устойчивость и слабую обратную связь по усилию, что существенно ограничивает эффективность работы оператора и создает риски для безопасности. Отсутствие адекватного тактильного ощущения, позволяющего почувствовать сопротивление и взаимодействие с окружающей средой, приводит к неточностям при выполнении задач и повышенной утомляемости оператора. Невозможность точно оценить приложенное усилие может привести к повреждению как манипулятора, так и объекта взаимодействия, особенно в сложных и деликатных операциях. Разработка систем, обеспечивающих более реалистичную и интуитивно понятную тактильную обратную связь, является критически важной для повышения надежности и безопасности дистанционного управления в различных областях применения, от хирургии до работы в опасных средах.
Переход между различными роботизированными платформами в рамках дистанционного управления требует значительных усилий по перенастройке и специализированных знаний. Каждый робот, отличающийся кинематикой и динамикой, нуждается в индивидуальной калибровке системы управления, что делает процесс трудоемким и ограничивает возможности быстрого развертывания технологии. Отсутствие универсальности и необходимость в высококвалифицированном персонале для адаптации к новым роботам существенно препятствует широкому внедрению телеоператорских систем в промышленные и исследовательские области, снижая их потенциальную эффективность и доступность для широкого круга пользователей.
Для создания действительно универсальной системы дистанционного управления необходимо преодолеть ограничения, связанные с совместимостью с различными робототехническими платформами и улучшенной интеграцией сенсорной информации. Такая система должна обладать способностью адаптироваться к различным конструкциям роботов, не требуя сложной перекалибровки и специализированных знаний оператора. Ключевым аспектом является обеспечение полноценной обратной связи, включающей не только визуальную информацию, но и тактильные ощущения, силу, и другие параметры, позволяющие оператору интуитивно понимать взаимодействие робота с окружающей средой. Успешная реализация подобного подхода откроет возможности для широкого применения телеоператоров в самых разнообразных сферах, от работы в опасных условиях до выполнения сложных манипуляций в медицине и науке, значительно повышая эффективность и безопасность операций.
ACE-F: Адаптивная Платформа для Телеуправления
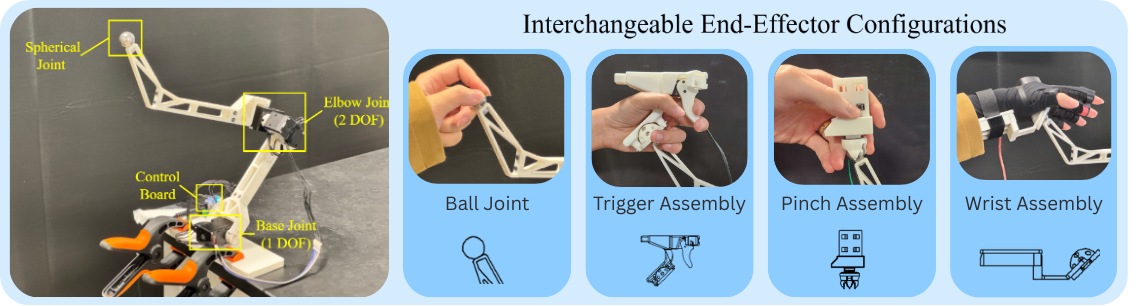
Система дистанционного управления ACE-F представляет собой универсальную, складываемую платформу, предназначенную для работы с роботами различной конструкции. Ключевой особенностью является её способность адаптироваться к различным кинематическим схемам и физическим параметрам роботов-исполнителей, обеспечивая совместимость без необходимости внесения существенных изменений в программное обеспечение или аппаратную часть. Это достигается за счёт модульной архитектуры и использования абстрактных интерфейсов, позволяющих системе динамически конфигурироваться для взаимодействия с широким спектром роботизированных платформ. По сути, ACE-F позволяет оператору эффективно управлять роботами с различными степенями свободы и конфигурациями, как если бы они имели единую, стандартизированную структуру.
Система ACE-F использует управление по декартовым координатам (Cartesian Control) и расширенный решатель обратной кинематики (Augmented IK Solver) для обеспечения стабильного и точного управления роботом. Управление по декартовым координатам позволяет задавать желаемое положение и ориентацию инструмента робота непосредственно в трехмерном пространстве, упрощая планирование траектории и избежание столкновений. Расширенный решатель обратной кинематики дополняет стандартные алгоритмы, учитывая ограничения суставов и обеспечивая плавное и надежное выполнение движения даже в сложных конфигурациях и при наличии препятствий. Такой подход позволяет оператору интуитивно управлять роботом, сохраняя при этом высокую точность и стабильность работы в различных сценариях.
Система ACE-F использует модель виртуальной пружины и расчет виртуальной целевой позы для создания реалистичной и интуитивно понятной тактильной обратной связи для оператора. Модель виртуальной пружины моделирует упругость взаимодействия между манипулятором робота и окружающей средой, передавая оператору ощущение сопротивления при контакте. Расчет виртуальной целевой позы определяет оптимальное положение и ориентацию манипулятора, учитывая ограничения робота и препятствия в рабочей среде. Комбинация этих двух компонентов позволяет оператору ощущать силы, действующие на робота, и точно управлять им, даже в сложных сценариях взаимодействия с объектами.
Система ACE-F использует перчаточные датчики отслеживания движений рук и инерциальный измерительный блок (IMU) для точного захвата и передачи движений оператора. Перчатки фиксируют положение и ориентацию пальцев, а IMU отслеживает общую ориентацию и движения руки в пространстве. Комбинация этих двух технологий позволяет системе ACE-F реконструировать движения оператора с высокой точностью и минимальной задержкой, что значительно улучшает ощущение погружения и обеспечивает более интуитивное и естественное управление роботом. Данные, полученные с перчаток и IMU, используются для управления виртуальной рукой робота, обеспечивая прямую кинематическую связь между движениями оператора и действиями робота.

Экспериментальное Подтверждение и Производительность Системы
Для демонстрации кросс-платформенной функциональности ACE-F, система была протестирована на двух различных роботизированных платформах: Franka Emika Panda и UFactory XArm. Использование обеих систем позволило подтвердить независимость ACE-F от конкретной аппаратной реализации и обеспечить переносимость алгоритмов управления и планирования движений между различными кинематическими структурами и характеристиками роботов. Тестирование на различных роботах подтвердило, что ACE-F может адаптироваться к различным параметрам, таким как длина звеньев, масса и инерция, обеспечивая стабильную и точную работу независимо от используемой роботизированной платформы.
Для обеспечения стабильного и точного отслеживания траектории, система ACE-F использует комбинацию ПД-регулятора (Пропорционально-Дифференциального) и обратной динамики. ПД-регулятор позволяет корректировать отклонения от заданной траектории, а обратная динамика компенсирует нелинейности и гравитационные силы, воздействующие на манипулятор. Эффективность данного подхода подтверждается количественными метриками, включающими точность позиционирования, скорость отслеживания и минимальные колебания, которые измеряются в ходе экспериментов с использованием различных робототехнических платформ и задач. Полученные данные позволяют оценить стабильность системы и ее способность к поддержанию заданной траектории в различных условиях.
В ходе симуляционных экспериментов по укладке блоков ACE-F продемонстрировала на 54.62% более высокую скорость выполнения задачи по сравнению с базовым алгоритмом Gello. Данный результат был получен в ходе серии тестов, направленных на оценку эффективности алгоритма в условиях, требующих быстрого и точного манипулирования объектами. Повышение скорости свидетельствует об оптимизации алгоритма ACE-F для эффективного планирования траектории и управления роботом при выполнении задачи укладки блоков.
В ходе симуляции задачи укладки блоков ACE-F продемонстрировала повышенную надежность выполнения по сравнению с базовым алгоритмом Gello. Показатель успешного выполнения данной задачи составил 28.57% выше для ACE-F. Это свидетельствует о более стабильной и точной работе системы при решении задач манипулирования, требующих последовательного выполнения действий и поддержания стабильности в процессе.
В ходе реальных экспериментов по “слепой” вставке банок ACE-F продемонстрировала 100% успешность выполнения задачи. Это значительно превосходит результат системы Gello, которая достигла успеха лишь в 50% случаев. Данный результат указывает на превосходство ACE-F в задачах, требующих высокой точности и надежности при отсутствии визуальной информации, что критически важно для применения в автоматизированных системах и робототехнике.
В ходе симуляций уборки стола, ACE-F продемонстрировала улучшенный контроль силы. В конфигурациях движения влево-вправо и вперед-назад, ACE-F достигла снижения отношения максимальной силы к средней силе на 36.16% и 41.86% соответственно, по сравнению с базовым алгоритмом Gello. Данный показатель свидетельствует о более плавной и контролируемой траектории движения манипулятора при выполнении задачи, что способствует снижению риска повреждения объекта и повышению эффективности уборки.
Использование параметров URDF (Unified Robot Description Format) для описания роботов и проведения симуляций обеспечило точную и согласованную работу системы ACE-F на различных платформах. Формат URDF стандартизирует представление кинематической и динамической моделей роботов, включая геометрию звеньев, соединения, массы и инерционные характеристики. Это позволило ACE-F корректно функционировать как с Franka Emika Panda, так и с UFactory XArm, поскольку система использует единое, стандартизированное описание робота для симуляций и управления. Такой подход гарантирует, что результаты симуляций точно отражают поведение системы в реальном мире, а алгоритмы управления, разработанные на основе этих симуляций, успешно работают на различных аппаратных конфигурациях без необходимости внесения существенных изменений.
Перспективы Развития: Интеграция ACE-F с Обучением с Подкреплением
Платформа ACE-F представляет собой надежную и интуитивно понятную систему для сбора высококачественных демонстрационных данных, что является критически важным для обучения с подражанием. Она позволяет эффективно записывать действия опытных операторов, создавая обширный набор примеров, необходимых для обучения роботов сложным манипуляциям. Благодаря тщательно откалиброванным датчикам силы и тактильной обратной связи, ACE-F фиксирует не только положение и скорость движения, но и прикладываемые усилия, обеспечивая более полное и точное представление о требуемом поведении. Такой подход позволяет алгоритмам обучения с подражанием более эффективно извлекать закономерности из демонстраций и воспроизводить их с высокой точностью, что существенно повышает эффективность обучения роботов новым навыкам и задачам.
Сочетание платформы ACE-F с окружением Robosuite предоставляет исследователям уникальную возможность эффективно оценивать и сравнивать новые алгоритмы обучения с подкреплением и имитационного обучения. Благодаря стандартизированной среде Robosuite и надежным данным, получаемым от ACE-F, можно объективно измерить прогресс в разработке алгоритмов, способных решать сложные задачи манипулирования. Это позволяет быстро прототипировать, тестировать и оптимизировать различные подходы, значительно ускоряя процесс создания более адаптивных и автономных роботизированных систем. В результате, появляется возможность более детального анализа сильных и слабых сторон каждого алгоритма в контролируемых условиях, что критически важно для дальнейшего развития робототехники.
Интеграция ACE-F с алгоритмами обучения с подражанием открывает новые возможности для повышения автономности и адаптивности робототехнических систем. Роботы, обученные на демонстрациях, выполняемых человеком, способны осваивать сложные задачи, которые трудно запрограммировать традиционными методами. Этот подход позволяет переносить человеческие навыки и интуицию на роботизированные платформы, что особенно важно в ситуациях, требующих гибкости и способности к импровизации. Обучение с подражанием, усиленное тактильной обратной связью от ACE-F, позволяет роботам не только воспроизводить движения, но и понимать нюансы взаимодействия с окружающей средой, что значительно расширяет спектр решаемых задач и повышает надежность работы в динамических условиях.
Дальнейшие исследования направлены на усовершенствование моделей обратной связи по силе, что позволит создавать более точные и чувствительные системы управления роботами. Особое внимание уделяется применению этих технологий в областях, требующих высокой точности и безопасности, таких как удалённая хирургия, где робот-ассистент должен деликатно взаимодействовать с тканями, и исследование опасных сред, где роботы могут выполнять задачи, недоступные для человека. Совершенствование моделей обратной связи по силе позволит роботам более эффективно адаптироваться к различным условиям и выполнять сложные манипуляции с повышенной надежностью, открывая новые возможности для автоматизации и расширения сферы применения робототехники в критически важных областях.

Исследование, представленное в данной работе, демонстрирует элегантную адаптацию к изменяющимся условиям и морфологиям роботов. Система ACE-F, стремясь к интуитивному управлению и сенсорной обратной связи, словно пытается замедлить энтропию, присущую любой сложной системе. Андрей Колмогоров однажды заметил: «Математика — это искусство открывать закономерности в хаосе». В контексте телеопераций, ACE-F, используя обратную кинематику и сенсорное управление, стремится выявить эти закономерности, позволяя оператору эффективно взаимодействовать с роботом, несмотря на различия в их конструкциях. Это, по сути, попытка создать систему, которая стареет достойно, сохраняя свою функциональность и точность с течением времени и при различных конфигурациях.
Куда же дальше?
Представленная система ACE-F, безусловно, демонстрирует прагматичный подход к проблеме телеоператорского управления. Однако, следует помнить: любое упрощение — это отложенный платеж. Отказ от сенсорного контроля в пользу обратной кинематики — это компромисс, чья долгосрочная стоимость ещё предстоит оценить. Эффективность системы, несомненно, зависит от точности кинематической модели и способности алгоритмов справляться с непредсказуемостью реального мира.
Более глубокое исследование возможностей адаптации системы к различным морфологиям роботов представляется ключевым направлением. Недостаточно просто «подстроить» алгоритмы; необходимо понять, как меняется сама природа управления в зависимости от физической архитектуры. Иными словами, следует сосредоточиться не на универсальности, а на элегантности адаптации — на способности системы сохранять свою «достоинство» при изменениях.
В конечном итоге, ACE-F — это ещё один шаг в долгой эволюции систем телеприсутствия. И, как и любая система, она неизбежно устареет. Вопрос лишь в том, насколько качественно она это сделает, оставив после себя не просто набор алгоритмов, а ценный опыт и понимание природы управления сложными системами.
Оригинал статьи: https://arxiv.org/pdf/2511.20887.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Санкционный удар по России: Минфин США расширяет список ограничений – что ждет экономику? (25.02.2026 05:32)
- Новые смартфоны. Что купить в марте 2026.
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- vivo X300 FE ОБЗОР: портретная/зум камера, беспроводная зарядка, объёмный накопитель
- Неважно, на что вы фотографируете!
- Восстановление 3D и спектрального изображения растений с помощью нейронных сетей
- Microsoft Edge позволяет воспроизводить YouTube в фоновом режиме на Android — подписка Premium не требуется.
- МосБиржа на подъеме: что поддерживает рынок и какие активы стоит рассмотреть? (27.02.2026 22:32)
- Как установить Virtualbox на Windows 11 для бесплатных виртуальных машин
- Cubot X100 ОБЗОР: отличная камера, удобный сенсор отпечатков, плавный интерфейс
2025-11-27 21:30