Автор: Денис Аветисян
Новое исследование показывает, что для надежного захвата предмета роботом важна не только точность определения его положения в пространстве, но и качество трехмерной модели, используемой для планирования захвата.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"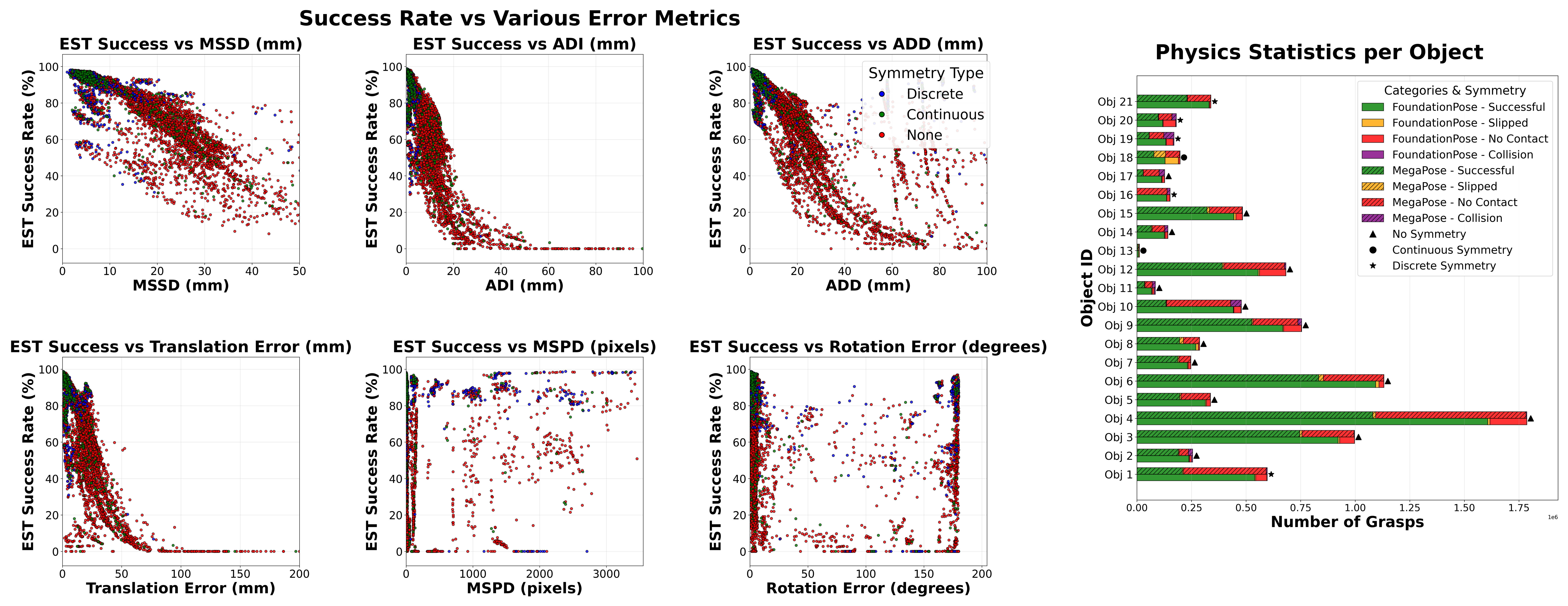
Оценка влияния 6D-оценки положения и 3D-реконструкции на вероятность успешного захвата объекта роботом-манипулятором.
Несмотря на значительный прогресс в задачах 3D-реконструкции и оценки позы объектов, их влияние на эффективность роботизированного захвата остается недостаточно изученным. В данной работе, ‘Benchmarking the Effects of Object Pose Estimation and Reconstruction on Robotic Grasping Success’, предложен масштабный, физически обоснованный бенчмарк, оценивающий 6D-оценщики позы и 3D-модели на основе их функциональной эффективности в задачах захвата. Полученные результаты показывают, что точность оценки позы критически важна, в то время как точность 3D-реконструкции влияет главным образом на количество доступных кандидатов на захват, но не на сам процент успешных захватов. Как более полное понимание взаимосвязи между качеством восприятия и манипуляциями позволит создавать более надежные и адаптивные роботизированные системы?
Задача Надежного Роботизированного Восприятия
Надежное захватывание объектов роботами требует точного трехмерного понимания окружающей среды, однако реальный мир представляет собой сложную задачу для систем восприятия. Неоднородное освещение, частичная видимость объектов и разнообразие текстур создают значительные трудности для алгоритмов, стремящихся определить положение и ориентацию объектов в пространстве. Погрешности в определении геометрии приводят к неудачам при захвате, снижая эффективность роботов в динамичных и неструктурированных условиях. Разработка систем, способных справляться с этими сложностями, является ключевым направлением в робототехнике, открывающим путь к более гибким и автономным роботам, способным эффективно функционировать в реальных условиях.
Традиционные методы оценки положения и ориентации объектов, используемые в робототехнике, часто оказываются неэффективными при столкновении с реальными условиями. Изменчивость освещения, частичная видимость объектов из-за перекрытий (окклюзий) и разнообразие текстур поверхностей значительно усложняют задачу. Например, глянцевая поверхность может создавать блики, искажающие данные датчиков, а отсутствие четкой текстуры затрудняет определение границ объекта. В результате, алгоритмы компьютерного зрения могут давать неточные или ошибочные оценки положения, что негативно сказывается на надежности захвата и манипулирования объектами роботом. Повышение устойчивости к этим факторам является ключевой задачей для создания роботов, способных эффективно работать в неструктурированных средах.
Недостаточная надёжность систем восприятия значительно ограничивает возможности широкого внедрения роботов в неструктурированные среды, такие как домашние хозяйства, строительные площадки или сельскохозяйственные угодья. В отличие от контролируемых производственных условий, где окружение предсказуемо, реальный мир полон непредсказуемых изменений освещения, частичной видимости объектов и разнообразия текстур. Эти факторы приводят к ошибкам в определении положения и формы объектов, что делает захват и манипулирование ими ненадежным. В результате, роботы, лишенные способности эффективно адаптироваться к сложным условиям, остаются неспособными выполнять задачи, требующие высокой степени точности и гибкости в динамичном окружении, что сдерживает развитие автоматизации за пределами специализированных отраслей.
Эффективное манипулирование роботами напрямую зависит от способности создавать полные и точные трехмерные модели окружающих объектов. Полнота модели подразумевает учет всех видимых поверхностей и геометрии, в то время как точность критически важна для корректного планирования движений и избежания столкновений. Разработка таких моделей представляет собой сложную задачу, поскольку реальный мир характеризуется вариативностью освещения, частичной видимостью объектов и разнообразием текстур. Использование передовых методов компьютерного зрения и алгоритмов реконструкции позволяет получать детальные 3D-представления, необходимые для успешного выполнения роботами сложных манипулятивных задач в неструктурированной среде, что открывает возможности для автоматизации широкого спектра производственных и бытовых процессов.
Современные Методы 3D-Реконструкции
Современный прогресс в области 3D-реконструкции активно использует неявные представления поверхностей, что позволяет создавать более устойчивые и детализированные модели. В отличие от традиционных методов, основанных на явном представлении геометрии (например, треугольные сетки), неявные представления описывают поверхность как ноль-уровень некой функции. Это позволяет представлять сложные топологии и детали без явного построения сетки, снижая чувствительность к шуму и пропадающим данным. В результате, модели, созданные с использованием неявных представлений, обладают повышенной робастностью и точностью, особенно в сложных сценах с мелкими деталями и сложной геометрией.
Современные методы 3D-реконструкции, такие как Neuralangelo, Instant NGP, MonoSDF, Unisurf и Volsdf, используют нейронные поля излучения (Neural Radiance Fields, NeRF) для создания высококачественных моделей. NeRF представляют сцену как непрерывную функцию, отображающую трехмерные координаты в цвет и плотность. Обучение нейронной сети на наборе двухмерных изображений позволяет реконструировать геометрию и внешний вид сцены, обеспечивая детализированные и реалистичные результаты. В отличие от традиционных методов, основанных на явном представлении геометрии, NeRF позволяют эффективно обрабатывать сложные сцены и получать модели с высоким разрешением.
В то время как коммерческое программное обеспечение, такое как RealityCapture, предоставляет хорошо зарекомендовавшие себя решения в области фотограмметрии, основанные на традиционных алгоритмах, современные нейронные методы, включая Neuralangelo, Instant NGP и другие, предлагают новые возможности в реконструкции 3D-моделей. Эти методы используют нейронные поля излучения для создания высококачественных реконструкций, обеспечивая более высокую детализацию и точность, особенно в сложных геометрических формах и текстурах. В отличие от традиционных подходов, требующих значительных вычислительных ресурсов для обработки больших наборов данных, некоторые из этих нейронных методов демонстрируют возможность быстрой реконструкции, что делает их перспективными для приложений реального времени и обработки больших объемов данных.
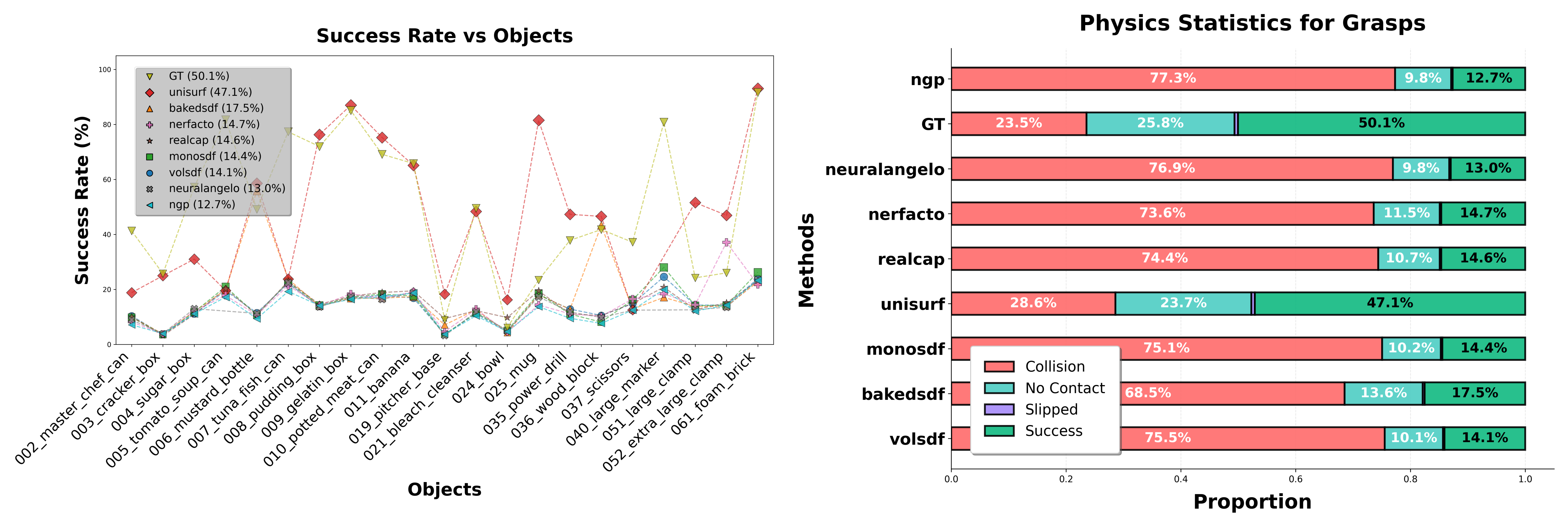
Оценка качества 3D-реконструкций производится с использованием метрик, таких как расстояние Чамфера (Chamfer Distance), которое позволяет количественно оценить точность и полноту полученной модели. В частности, при использовании моделей Unisurf, показатель успешности захвата (Grasp Generation Success Rate, S_{gen}) достигает сопоставимых значений с результатами, полученными на основе эталонных данных (ground truth), что подтверждает высокую степень реалистичности и пригодности реконструированных моделей для практических задач, например, в робототехнике и компьютерном зрении.
Точная Оценка Позы для Надежного Захвата
Точное определение 6D позы объекта — критически важный фактор для надежного захвата роботом. Под позой понимается совокупность информации о положении объекта в пространстве (координаты X, Y, Z) и его ориентации (углы поворота вокруг осей). Определение как позиции, так и ориентации необходимо для точного планирования траектории движения манипулятора и обеспечения надежного захвата, предотвращающего столкновения или потерю объекта. Отсутствие точной информации о позе приводит к неудачам захвата и требует повторных попыток, снижая эффективность работы робота.
Методы, такие как MegaPose и FoundationPose, повышают точность оценки 6D позы объектов, используя подходы на основе рендеринга и сравнения (render-and-compare pipelines). Эти системы генерируют синтетические изображения объекта в различных позах и сравнивают их с реальным изображением для определения наиболее вероятной позы. FoundationPose отличается использованием унифицированной архитектуры, позволяющей одновременно оценивать позу и сегментировать объект, что повышает надежность и эффективность оценки. В отличие от более специализированных подходов, унифицированные фреймворки позволяют решать задачи оценки позы в различных условиях освещения и при наличии частичной окклюзии.
Оценка производительности алгоритмов оценки позы осуществляется с использованием количественных метрик, таких как ADD (Add Metric) и MSSD (Mean Squared Error Distance). ADD Metric измеряет процент правильно определенных поз объектов при заданном пороге перекрытия, что позволяет оценить точность обнаружения. MSSD Metric вычисляет среднеквадратичное расстояние между предсказанной и истинной позой объекта, предоставляя информацию о точности определения как положения, так и ориентации. Эти метрики позволяют проводить объективное сравнение различных алгоритмов и оценивать их пригодность для конкретных задач манипулирования объектами. ADD = \frac{1}{N} \sum_{i=1}^{N} I(d_i < threshold), где d_i — расстояние между предсказанной и истинной позой, а I — индикаторная функция.
Для оценки и сопоставления различных алгоритмов оценки позы объектов используется платформа BOP Challenge. В рамках этого соревнования алгоритм FoundationPose продемонстрировал Estimated Success Rate (Sest) в 89.9%, что значительно превосходит показатель MegaPose, составивший 59.4%. Данные результаты подтверждают эффективность FoundationPose в задачах точной оценки 6D-позы объектов, необходимой для надежного захвата роботом.
Подтверждение Эффективности Роботизированного Захвата
Успешность захвата объектов роботом напрямую зависит от точности трехмерной реконструкции и определения шестимерной позы объекта в пространстве. Неточности в определении положения и ориентации объекта приводят к неэффективным попыткам захвата и, как следствие, к неудаче. Современные алгоритмы компьютерного зрения и машинного обучения направлены на повышение точности этих измерений, позволяя роботам надежно идентифицировать и захватывать объекты различной формы и размера. Достижение высокой точности в 3D-реконструкции и 6D-оценке позы является критически важным для обеспечения надежной и эффективной работы роботов в различных сферах, от автоматизированного производства до сервисной робототехники.
Для объективной оценки эффективности алгоритмов захвата роботами широко используется стандартизированный набор YCB Object and Model Set. Этот набор включает в себя 3D-модели и реальные объекты, представляющие широкий спектр повседневных предметов, что позволяет исследователям проводить сравнительный анализ различных подходов к планированию захвата. Наличие единого набора данных обеспечивает воспроизводимость экспериментов и позволяет точно оценивать прогресс в области робототехники, предоставляя четкий критерий для сравнения производительности различных систем и алгоритмов захвата. Использование YCB Object and Model Set значительно упрощает процесс валидации и верификации новых методов, способствуя развитию более надежных и эффективных роботизированных систем.
Для количественной оценки надежности захвата роботизированными системами используются два ключевых показателя: частота успешной генерации захвата и расчетная частота успешности. Первый показатель, частота успешной генерации захвата, отражает процент попыток захвата, которые приводят к физически стабильному удержанию объекта. В свою очередь, расчетная частота успешности представляет собой оценку вероятности успешного захвата, основанную на алгоритмах планирования и предсказания. Высокие значения обоих показателей свидетельствуют о надежной и эффективной системе захвата, способной успешно манипулировать различными объектами в сложных условиях. Сопоставление этих метрик позволяет оценить не только фактическую производительность системы, но и ее потенциал для выполнения задач в реальном времени, что критически важно для автоматизации производственных процессов и других приложений робототехники.
Физический симулятор PyBullet предоставляет возможность реалистичного моделирования и проверки эффективности стратегий захвата объектов роботами, а платформа Dex-Net 2.0 — надежные методы обучения политик управления. В рамках данного исследования было продемонстрировано, что ключевым фактором, определяющим успех захвата, является точность оценки трехмерной позы объекта. Использование FoundationPose позволило достичь высокой Estimated Success Rate — 89.9%, что подтверждает значимость точной реконструкции геометрии и положения объекта для надежной работы роботизированных систем захвата. Такой подход позволяет существенно повысить эффективность и надежность автоматизированных процессов, связанных с манипулированием объектами.
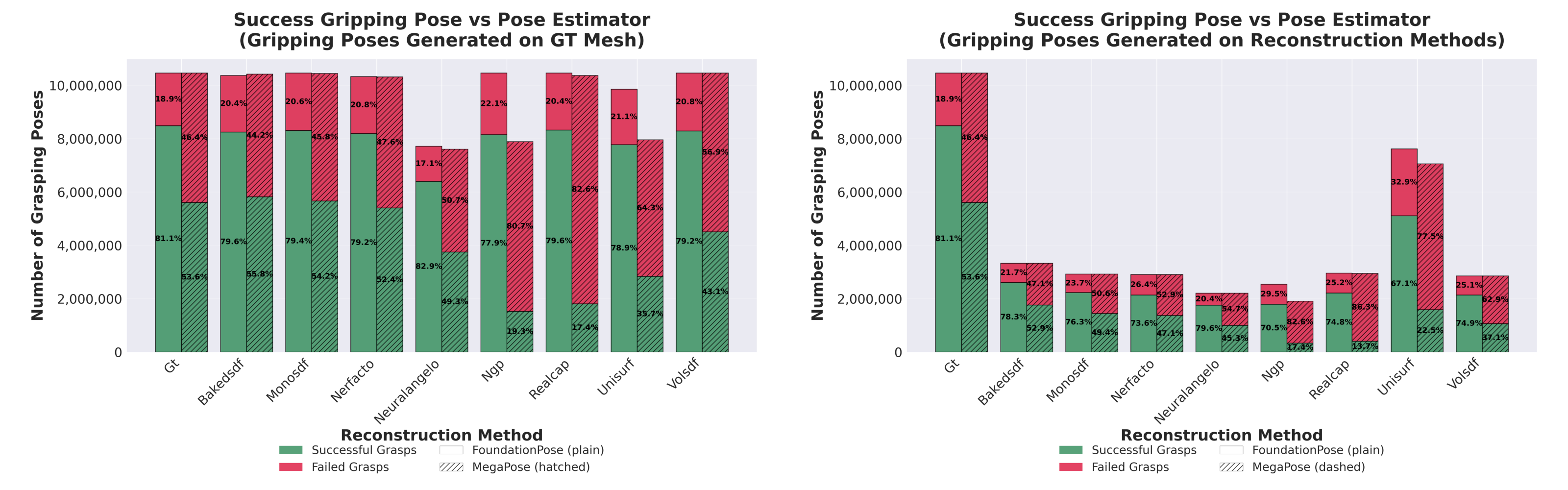
Исследование подчеркивает, что точность оценки 6D позы объекта является лишь частью сложной системы, определяющей успешность захвата роботом. Статья демонстрирует, что качество 3D реконструкции, используемой для планирования захвата, оказывает значительное влияние на количество доступных кандидатов на захват. В этом контексте особенно актуальны слова Анри Пуанкаре: «Наука не состоит из ряда истин, открытых одна за другой, но из системы, более или менее согласованной, постоянно перестраиваемой». Подобно этой системе, восприятие и действие в робототехнике взаимосвязаны, и оценка каждого компонента в отрыве от общей картины может привести к ошибочным выводам. Архитектура восприятия, оторванная от процесса действия, действительно хрупка и скоротечна, как и любая система, игнорирующая взаимосвязь своих частей.
Куда же дальше?
Представленная работа, как и любая попытка ухватить неуловимое, лишь подчеркивает фундаментальную истину: системы стареют. Безупречная оценка 6D-позы объекта, хоть и необходима, оказывается лишь временным состоянием, иллюзией стабильности, кэшированной временем. Более того, точность реконструкции трехмерной модели оказывает решающее влияние на количество жизнеспособных вариантов захвата, что демонстрирует, что восприятие, оторванное от действия, есть лишь фрагмент ускользающей реальности.
В дальнейшем, необходимо сместить акцент с поиска идеальных оценок на анализ системных задержек. Каждый запрос, каждое взаимодействие с миром требует времени, а задержка — это налог, который платит любая система. Необходимо исследовать, как эти задержки влияют на общую надежность манипуляций, и как их можно минимизировать, не жертвуя точностью. Речь идет не о создании «идеального глаза», а о разработке систем, способных адаптироваться к неизбежному старению и несовершенству информации.
Поиск абсолютной точности — путь в никуда. Вместо этого, стоит сосредоточиться на разработке систем, способных эффективно функционировать в условиях неопределенности и постоянно меняющихся параметров, признавая, что стабильность — это иллюзия, а время — среда, в которой существуют все системы.
Оригинал статьи: https://arxiv.org/pdf/2602.17101.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Oppo Find X9 Ultra ОБЗОР: большой аккумулятор, скоростная зарядка, чёткое изображение
- Неважно, на что вы фотографируете!
- Motorola Moto G34 ОБЗОР: большой аккумулятор, быстрый сенсор отпечатков, лёгкий
- IdeaPad Slim 3 15IRH10R ОБЗОР
- Canon EOS 80D
- Realme Narzo 70 ОБЗОР: плавный интерфейс, большой аккумулятор, замедленная съёмка видео
- Понимание предпочтений: новая модель для персонализированных рекомендаций
- Honor MagicBook 14 2022 ОБЗОР
- Лучшие смартфоны. Что купить в апреле 2026.
- TCL NxtPaper 70 Pro ОБЗОР: объёмный накопитель, удобный сенсор отпечатков, большой аккумулятор
2026-02-22 17:16