Автор: Денис Аветисян
Исследователи представили сложный тест, позволяющий оценить способность моделей понимать физический мир и планировать действия в трехмерном пространстве.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
Представлен бенчмарк CHAIN для оценки возможностей моделей vision-language в области интерактивного физического рассуждения и планирования.
Несмотря на значительные успехи в области моделей «зрение-язык», их способность к активному взаимодействию с физическим миром остается ограниченной. В работе ‘From Perception to Action: An Interactive Benchmark for Vision Reasoning’ представлена новая среда CHAIN — интерактивный 3D-тест, предназначенный для оценки понимания физических ограничений и планирования действий. Полученные результаты демонстрируют, что даже самые современные модели испытывают трудности с внутренним представлением физической структуры и построением надежных долгосрочных планов. Сможем ли мы создать агентов, способных не только воспринимать окружающую среду, но и эффективно действовать в ней, опираясь на принципы физического мышления?
Понимание Физического Мира: Вызов для Искусственного Интеллекта
Современные системы искусственного интеллекта испытывают значительные трудности в решении задач, требующих интуитивного понимания физических принципов, например, предсказания взаимодействия объектов в пространстве. В отличие от людей, которые легко оценивают траектории движения, устойчивость конструкций или последствия столкновений, ИИ часто демонстрирует неустойчивые или нереалистичные результаты. Это связано с тем, что большинство существующих моделей обучаются на огромных объемах данных, но не способны к обобщению и применению знаний в новых, ранее не встречавшихся ситуациях. Даже кажущиеся простыми задачи, такие как определение, упадет ли башня из кубиков, или предсказание, как будет катиться мяч по наклонной поверхности, представляют собой серьезный вызов для алгоритмов, лишенных встроенного понимания законов физики и пространственных отношений. Эта проблема особенно актуальна для робототехники и автономных систем, где надежное предсказание физических последствий действий является критически важным для безопасной и эффективной работы.
Традиционные подходы к созданию искусственного интеллекта, основанные на обучении на огромных массивах данных, часто оказываются неэффективными при столкновении с новыми, непредсказуемыми ситуациями. Хотя такие системы могут успешно справляться с задачами, для которых у них есть достаточно примеров, их возможности резко снижаются, когда требуется экстраполировать знания на незнакомые условия. Проблема заключается в том, что накопление большого количества данных не обеспечивает понимания фундаментальных физических принципов, управляющих взаимодействием объектов. В результате, модели, обученные таким образом, испытывают трудности с предсказанием поведения объектов в новых сценариях, где требуется не просто распознавание шаблонов, а активное рассуждение о возможных исходах, основанное на понимании сил, скоростей и других физических параметров. Это подчеркивает необходимость разработки принципиально новых подходов, способных к более гибкому и адаптивному мышлению.
Существующий разрыв в возможностях искусственного интеллекта подчеркивает необходимость создания систем, способных не просто воспринимать физический мир, но и активно рассуждать о его ограничениях и потенциале. Вместо пассивного анализа больших объемов данных, требуется развитие моделей, которые могут самостоятельно выводить закономерности, предсказывать последствия действий и адаптироваться к новым, ранее не встречавшимся ситуациям. Это предполагает способность оценивать физические свойства объектов, учитывать гравитацию, инерцию и другие силы, а также прогнозировать траектории движения и взаимодействия. Такой подход позволит создать ИИ, способный решать задачи, требующие интуитивного понимания физического мира, например, планировать сложные манипуляции с объектами или предсказывать поведение физических систем.
Для создания действительно эффективных систем искусственного интеллекта, способных к решению задач, требующих понимания физического мира, необходимо сочетание двух ключевых способностей: пространственной осведомленности и предвидения последствий действий. Модели должны не просто «видеть» объекты и их взаимное расположение, но и понимать, как эти объекты будут взаимодействовать в различных ситуациях. Это требует способности моделировать физические ограничения — гравитацию, инерцию, трение — и прогнозировать, как эти силы повлияют на траекторию движения объектов или результат манипуляций с ними. Такой подход позволяет системе не просто реагировать на текущую ситуацию, но и планировать действия, учитывая потенциальные последствия, что критически важно для решения сложных задач в реальном мире, например, в робототехнике или автоматизированном проектировании.
CHAIN: Строгая Платформа для Оценки Физического Рассуждения
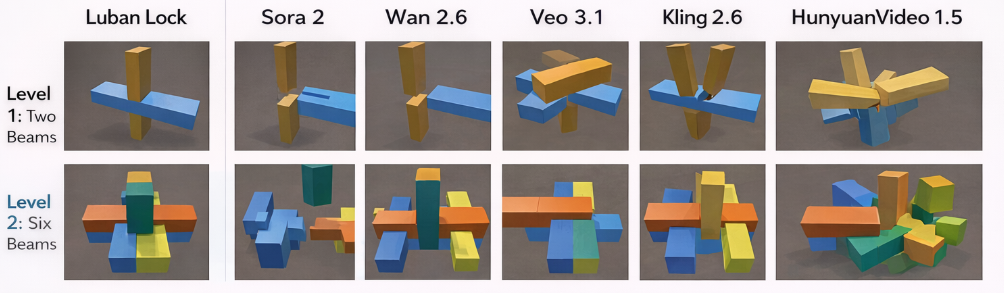
Бенчмарк CHAIN представляет собой строгую платформу для оценки способностей моделей искусственного интеллекта к физическому рассуждению посредством интерактивного решения трехмерных головоломок. В отличие от статических оценочных тестов, CHAIN требует от агентов активного манипулирования объектами и реагирования на физические последствия этих действий. Платформа позволяет оценивать не только способность к решению конкретных задач, но и общее понимание физических принципов, лежащих в основе взаимодействия объектов в трехмерном пространстве. Для обеспечения надежности и воспроизводимости результатов, CHAIN включает в себя стандартизированный набор головоломок с четко определенными условиями и критериями оценки.
В отличие от статических оценочных тестов, бенчмарк CHAIN требует от агентов активного манипулирования объектами и реагирования на физические последствия этих действий. Это означает, что агенты не просто предсказывают результаты, но и непосредственно влияют на окружение, а затем адаптируются к полученным результатам. Такой подход выходит за рамки пассивного прогнозирования, требуя от агента планирования действий и учета динамики физического мира для достижения поставленной цели. Оценка проводится на основе способности агента успешно решать задачи, требующие последовательного взаимодействия с объектами и учета законов физики.
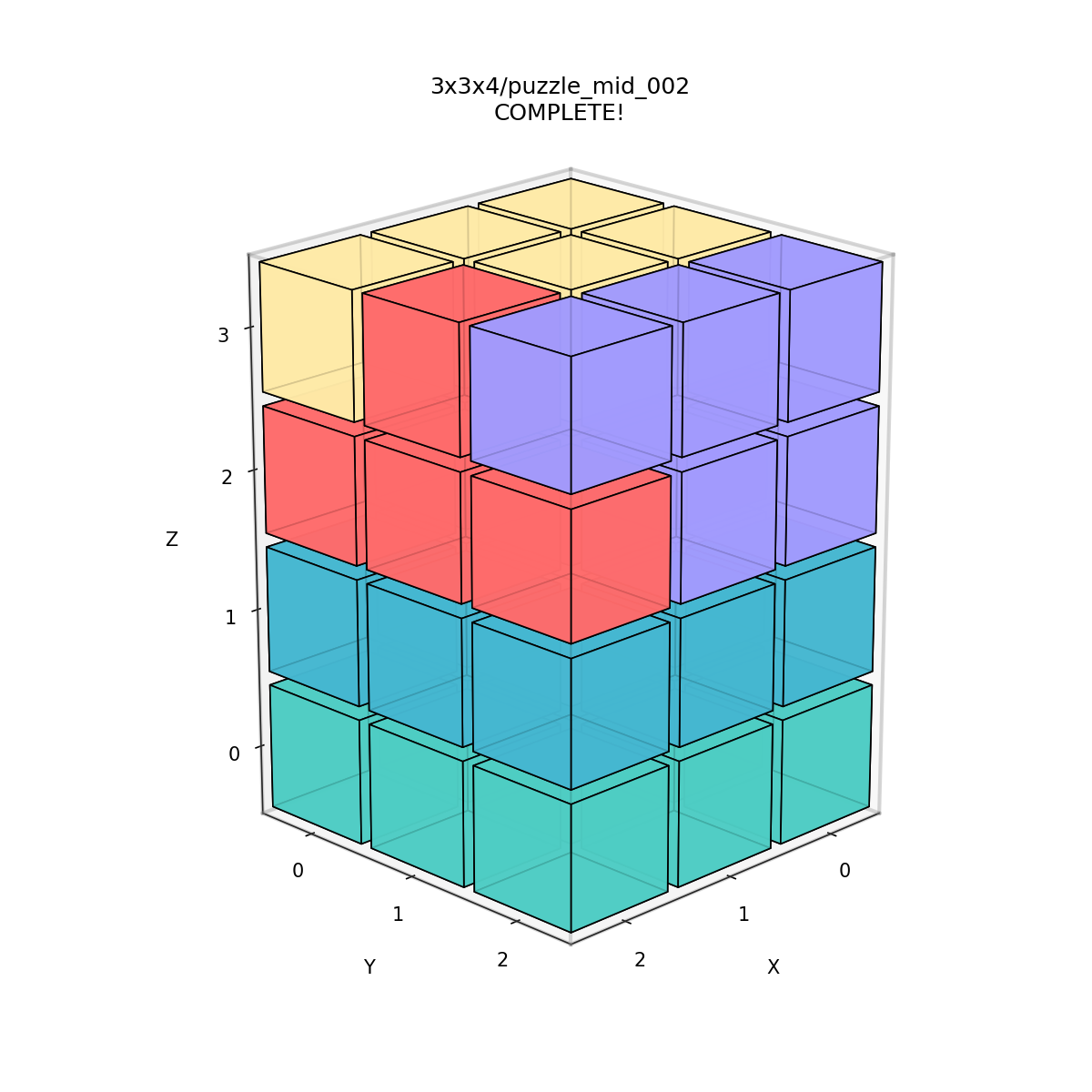
Бенчмарк CHAIN включает в себя как задачи на сборку 3D-головоломок, так и задачи на 3D-стекирование, что позволяет оценить навыки ИИ в области манипулирования объектами. Задачи на сборку головоломок требуют от агента точного выполнения заданных ограничений и последовательности действий, в то время как задачи на стекирование предоставляют более открытую среду, где агент может свободно располагать объекты для достижения цели. Такой подход позволяет оценить возможности ИИ как в условиях строгих ограничений, так и в ситуациях, требующих планирования и адаптации к сложным физическим взаимодействиям.
Конструкция эталонного теста CHAIN делает акцент на важности удовлетворения ограничениям и точного прогнозирования физических взаимодействий. В задачах, представленных в CHAIN, агенты должны не просто предсказывать результаты действий, но и активно планировать последовательности манипуляций с объектами, учитывая законы физики и ограничения, накладываемые условиями задачи. Успешное решение требует от агента способности моделировать физическую среду, предсказывать последствия каждого действия и выбирать последовательность действий, которая удовлетворяет заданным ограничениям, таким как стабильность конструкции или достижение конкретной цели расположения объектов.

Диффузия и Мировые Модели в Действии: Ключ к Физическому Рассуждению
Диффузионные модели демонстрируют перспективность в генерации правдоподобных последовательностей действий в 3D-среде CHAIN, однако для реализации этого потенциала необходима эффективная система планирования. Генерация действий напрямую зависит от способности модели предвидеть последствия каждого шага и формировать последовательность, ведущую к желаемому результату. Без четкого планирования, диффузионные модели склонны генерировать хаотичные или неэффективные последовательности действий, не приводящие к успешному выполнению задачи. Таким образом, интеграция диффузионных моделей с алгоритмами планирования является ключевым фактором для повышения их эффективности в сложных 3D-окружениях.
Мировые модели служат ключевым механизмом для симуляции последствий действий и прогнозирования будущих состояний, что существенно повышает эффективность планирования. Они позволяют агенту «представлять» результаты различных действий без необходимости их фактического выполнения в реальном времени, что особенно важно в сложных и динамичных средах. За счет моделирования физических законов и взаимосвязей между объектами, мировая модель предоставляет возможность оценить вероятность успеха различных стратегий и выбрать наиболее оптимальную последовательность действий для достижения поставленной цели. Точность прогнозирования, обеспечиваемая мировой моделью, напрямую влияет на качество планирования и, следовательно, на общую производительность агента.
Успешность моделей, использующих диффузию и мировые модели, напрямую зависит от их способности к обучению и представлению физических ограничений окружающей среды, а также к точному прогнозированию результатов действий. Эффективное моделирование физики, включая гравитацию, трение и столкновения, необходимо для генерации правдоподобных и выполнимых последовательностей действий. Неспособность адекватно учитывать эти ограничения приводит к нереалистичным или невозможным траекториям и, следовательно, к снижению показателей успешности, таких как Pass@1. Точность предсказания исходов действий критична для планирования, позволяя моделям выбирать оптимальные действия для достижения поставленной цели и избегать неудачных попыток.
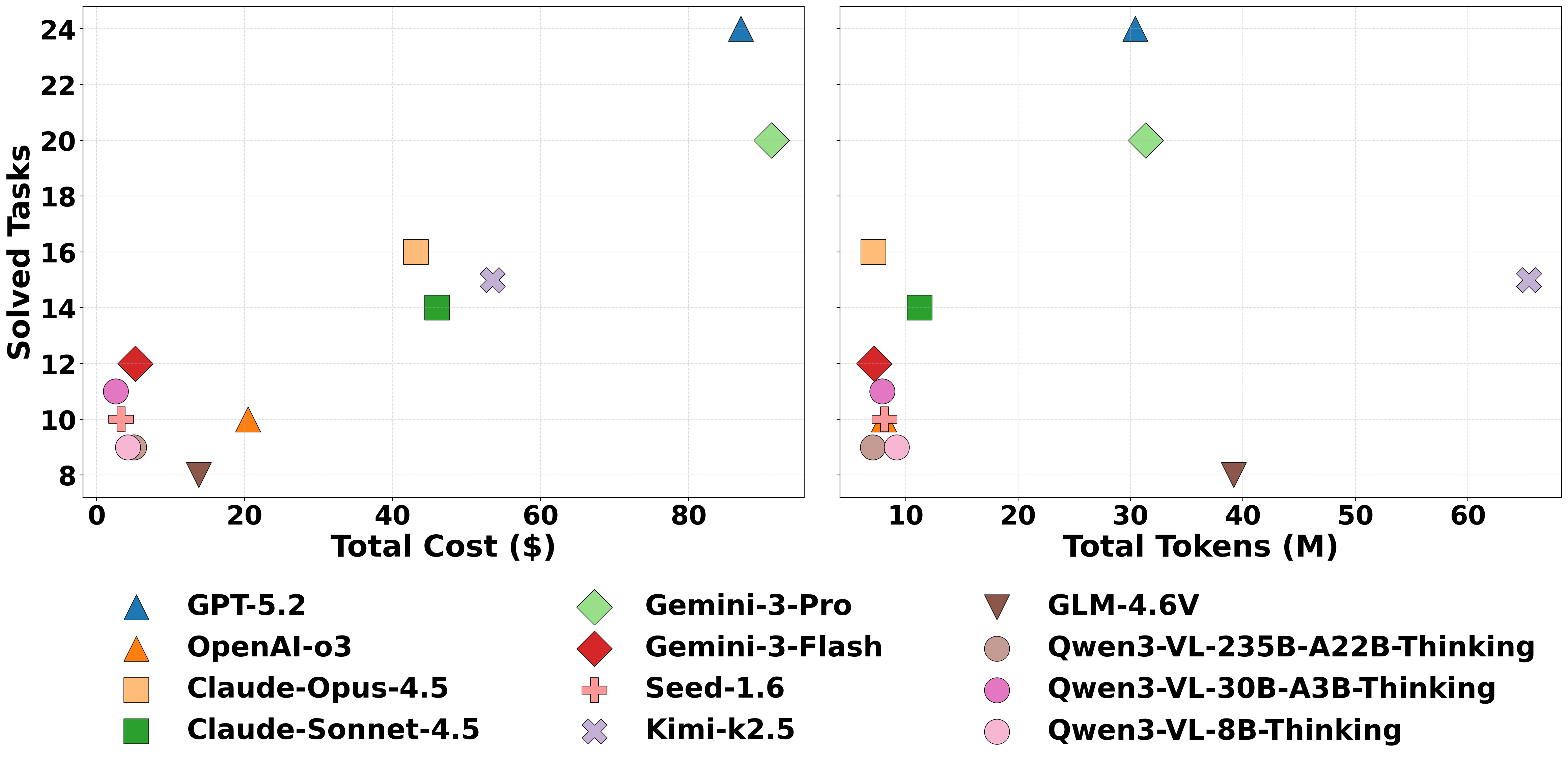
Современные передовые модели демонстрируют крайне низкий показатель успешности (Pass@1) — около 3.1% — при решении головоломок в среде CHAIN. Данный показатель указывает на значительную сложность данного эталона для существующих алгоритмов и моделей, подчеркивая необходимость дальнейших исследований и разработок в области планирования действий и представления знаний о физическом мире. Низкий процент успешных попыток свидетельствует о проблемах с обобщением и адаптацией к новым, незнакомым задачам, требующим сложных последовательностей действий и точного понимания физических ограничений.
Несмотря на более высокие показатели успешности на задачах, связанных со сборкой (stacking), даже самые передовые модели, такие как GPT-5.2, достигают коэффициента Pass@1 лишь до 31.2%. Это свидетельствует о существенном потенциале для дальнейшего улучшения производительности и необходимости разработки более эффективных алгоритмов и архитектур моделей для решения подобных задач. Низкий процент успешного прохождения указывает на сложность точного прогнозирования и выполнения последовательности действий, необходимых для успешной сборки, даже для современных моделей искусственного интеллекта.
Наблюдается существенное снижение процента успешного выполнения задач при переходе от интерактивного режима к режиму однократной попытки (one-shot). В интерактивном режиме модель получает обратную связь после каждого действия, что позволяет ей корректировать стратегию и повышать вероятность успеха. В режиме однократной попытки, где обратной связи нет, модель вынуждена действовать на основе предсказаний и без возможности исправления ошибок, что приводит к значительному снижению эффективности. Данный факт подтверждает критическую важность интерактивной обратной связи для достижения даже минимальных результатов в задачах планирования действий.
Взгляд в Будущее: К Универсальному Искусственному Интеллекту, Способному к Физическому Рассуждению
Успешное решение задач в среде CHAIN демонстрирует перспективный подход к созданию искусственного интеллекта, способного к обобщенному физическому рассуждению. В отличие от систем, обученных решению узкого круга задач, алгоритмы, успешно освоившие принципы CHAIN, способны адаптироваться к новым, ранее не встречавшимся физическим головоломкам и даже к реальным задачам, требующим понимания законов физики. Это открывает возможности для разработки роботов, способных самостоятельно планировать и выполнять сложные манипуляции с объектами, автономных навигационных систем, эффективно обходящих препятствия, и реалистичных виртуальных сред, где взаимодействие с объектами подчиняется правдоподобным физическим законам. По сути, CHAIN служит платформой для обучения ИИ не просто запоминанию решений, а пониманию лежащих в их основе физических принципов, что является ключевым шагом на пути к созданию действительно универсального искусственного интеллекта.
Принципы, полученные в ходе интерактивной оценки и удовлетворения ограничениям, имеют решающее значение для развития робототехники, автономной навигации и виртуальной реальности. Способность агента к динамическому анализу физического окружения и адаптации к меняющимся условиям, продемонстрированная в исследованиях, позволяет создавать роботов, способных решать сложные задачи манипулирования и сборки в реальном времени. В контексте автономной навигации, эти принципы позволяют транспортным средствам эффективно планировать маршруты, избегая препятствий и учитывая физические ограничения окружающей среды. Виртуальная реальность также выигрывает от подобных подходов, поскольку они обеспечивают более реалистичное и правдоподобное взаимодействие с виртуальными объектами, имитируя законы физики и обеспечивая тактильную обратную связь, что значительно повышает степень погружения и достоверность симуляций.
Интеграция методов линейной сборки представляется перспективным направлением для повышения надёжности и эффективности алгоритмов, решающих головоломки. Вместо попыток найти полное решение сразу, подобные методы разбивают задачу на последовательность более простых шагов — сборку отдельных элементов или достижение промежуточных целей. Такой подход позволяет агенту справляться с более сложными и неоднозначными ситуациями, поскольку он может корректировать свои действия на каждом этапе, основываясь на текущих результатах. Успешное применение линейной сборки значительно снижает вычислительную сложность, позволяя алгоритмам быстрее находить решения и адаптироваться к изменяющимся условиям, что особенно важно для робототехники и автономной навигации, где требуется оперативное реагирование на внешние факторы.
Дальнейшие исследования в области физического искусственного интеллекта сосредоточены на увеличении масштабируемости существующих моделей и разработке более надежных методов обучения фундаментальным законам физики. Успешное решение задачи CHAIN демонстрирует перспективность подхода, однако для применения в реальных сценариях, таких как робототехника и автономная навигация, требуется преодолеть ограничения, связанные с вычислительными ресурсами и сложностью обобщения знаний. Особое внимание уделяется созданию алгоритмов, способных эффективно извлекать и использовать физические принципы из ограниченного количества данных, а также адаптироваться к новым, ранее не встречавшимся ситуациям. Разработка методов, позволяющих моделировать физические взаимодействия с высокой точностью и учитывать неопределенности в окружающей среде, является ключевым направлением для создания действительно интеллектуальных и надежных физических агентов.
Исследование, представленное в данной работе, акцентирует внимание на необходимости развития у моделей понимания физических ограничений и способности к долгосрочному планированию. Это согласуется с высказыванием Джеффри Хинтона: «Мы формируем мир, в котором машины могут учиться». CHAIN, как новый 3D-бенчмарк, направлен на выявление слабых мест современных vision-language моделей в области интерактивного физического рассуждения. Очевидно, что способность к взаимодействию с окружением требует от моделей не просто распознавания объектов, но и понимания причинно-следственных связей, что является ключевым аспектом для создания действительно интеллектуальных систем. Отсутствие такого понимания, как демонстрирует исследование, ограничивает возможности моделей в решении задач, требующих планирования и адаптации к изменяющимся условиям.
Что дальше?
Представленный анализ взаимодействия моделей с физическим миром, несомненно, выявляет закономерную сложность задачи. Попытки научить машину «понимать» физические ограничения и планировать действия в долгосрочной перспективе обнажают не просто технические препятствия, но и фундаментальные вопросы о природе рассуждений. Модели демонстрируют способность к имитации, но истинное понимание причинно-следственных связей, по-видимому, остаётся за пределами их возможностей.
Будущие исследования, вероятно, сосредоточатся на создании более сложных иерархических моделей, способных не только предсказывать непосредственные последствия действий, но и оценивать их влияние на более отдалённые события. Важным направлением представляется разработка методов обучения, позволяющих моделям самостоятельно выявлять и абстрагироваться от несущественных деталей, формируя компактные представления о физическом мире. Нельзя исключать и необходимость в новых подходах к оценке качества рассуждений, выходящих за рамки простых метрик успешности.
В конечном счёте, стремление к созданию искусственного интеллекта, способного к осмысленному взаимодействию с окружающей средой, требует не только технологических прорывов, но и глубокого философского осмысления самой природы познания. Задача, как показывает опыт, оказывается куда сложнее, чем казалось на первый взгляд.
Оригинал статьи: https://arxiv.org/pdf/2602.21015.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Lenovo Legion Y70 (2026) ОБЗОР: скоростная зарядка, чёткое изображение, много памяти
- Лучшие смартфоны. Что купить в июне 2026.
- vivo iQOO 15T ОБЗОР: огромный накопитель, яркий экран, плавный интерфейс
- Motorola Moto G47 ОБЗОР: удобный сенсор отпечатков, плавный интерфейс, большой аккумулятор
- Honor Play 80 Pro ОБЗОР: плавный интерфейс, большой аккумулятор, удобный сенсор отпечатков
- Что купить фотографу. Рекомендации
- Honor Magic8 RSR Porsche Design ОБЗОР: замедленная съёмка видео, беспроводная зарядка, чёткое изображение
- Фотографируем муравьёв с Андреем Павловым
- Обзор объектива Tokina 11-16mm f/2.8 AF
- Blackview Oscal Tiger 12 ОБЗОР: большой аккумулятор, плавный интерфейс, быстрый сенсор отпечатков
2026-02-25 12:49