Автор: Денис Аветисян
Новая платформа виртуальной реальности использует персонализированного аватара и алгоритмы оптимального управления для помощи пациентам после инсульта в восстановлении двигательных функций.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
Адаптивное управление на основе модели Хогана для удаленной реабилитации двигательных навыков в виртуальной реальности.
Несмотря на значительные достижения в области реабилитации после инсульта, доступ к регулярным занятиям остается проблемой для многих пациентов. В данной работе, посвященной ‘Adaptive Optimal Control for Avatar-Guided Motor Rehabilitation in Virtual Reality’, представлен инновационный подход, использующий виртуальную реальность и адаптивного аватара для персонализированной терапии на дому. Ключевым элементом является система оптимального управления, динамически подстраивающая уровень помощи пациенту на основе его прогресса и кинематической модели движения. Может ли предложенная платформа обеспечить эффективную и масштабируемую удаленную реабилитацию, расширяя возможности восстановления двигательных функций для широкого круга пациентов?
Тень Инсульта: Вызов Восстановления Движений
Инсульт часто приводит к гемипарезу — ослаблению или параличу одной стороны тела, что существенно ухудшает двигательные функции и, как следствие, качество жизни пациента. Данное состояние проявляется в затруднении выполнения даже простых повседневных действий, таких как ходьба, прием пищи или одевание, что требует длительной реабилитации и часто приводит к ограничению самостоятельности. Неспособность контролировать движения пораженной конечности не только влияет на физическое здоровье, но и оказывает значительное психологическое воздействие, вызывая чувство фрустрации, тревоги и депрессии. Степень выраженности гемипареза варьируется в зависимости от локализации и тяжести инсульта, однако в любом случае требует комплексного подхода к лечению и реабилитации для достижения максимального восстановления двигательных возможностей.
Традиционные методы реабилитации после инсульта часто оказываются недостаточно интенсивными и не всегда учитывают индивидуальные особенности каждого пациента. Стандартные протоколы, направленные на восстановление двигательных функций, нередко не способны обеспечить необходимую нагрузку для стимуляции нейропластичности — способности мозга к перестройке и адаптации. Более того, универсальный подход не позволяет учитывать степень повреждения мозга, текущий уровень функциональности и личные цели пациента. В результате, процесс восстановления может замедляться или достигать лишь частичного успеха, что существенно влияет на качество жизни после перенесенного инсульта. Необходимость в более персонализированных и интенсивных программах реабилитации становится очевидной для повышения эффективности восстановления двигательных навыков.
Оценка даже незначительных улучшений в плавности движений представляет собой сложную задачу в процессе реабилитации после инсульта, что затрудняет эффективный мониторинг прогресса пациентов. Для решения этой проблемы была разработана система, использующая Индекс Способности — показатель, варьирующийся от 0 до 1. Этот индекс позволяет количественно оценивать качество движений, выявляя даже небольшие изменения, которые могут быть пропущены при традиционной оценке. Благодаря этому, врачи получают более точную картину динамики восстановления, что позволяет корректировать программу реабилитации и повышать ее эффективность. $I_{ability}$ отражает сочетание амплитуды, скорости и согласованности движений, предоставляя объективный критерий для оценки восстановления моторных функций.

Виртуальная Реальность: Персонализированная Терапия в Новом Измерении
Виртуальная реальность (VR) предоставляет пациентам возможность тренировать двигательные навыки в иммерсивной и вовлекающей среде, что способствует более эффективному нейропластическому обучению. В отличие от традиционных методов реабилитации, VR позволяет пациентам выполнять повторяющиеся движения в контролируемой, но реалистичной обстановке, снижая риск падений и травм. Использование VR-систем позволяет точно отслеживать траекторию движений, скорость и амплитуду, предоставляя объективные данные для оценки прогресса и индивидуальной настройки терапевтических упражнений. Погружение в виртуальную среду также повышает мотивацию пациентов и способствует более активному участию в процессе реабилитации, что, в свою очередь, улучшает результаты лечения.
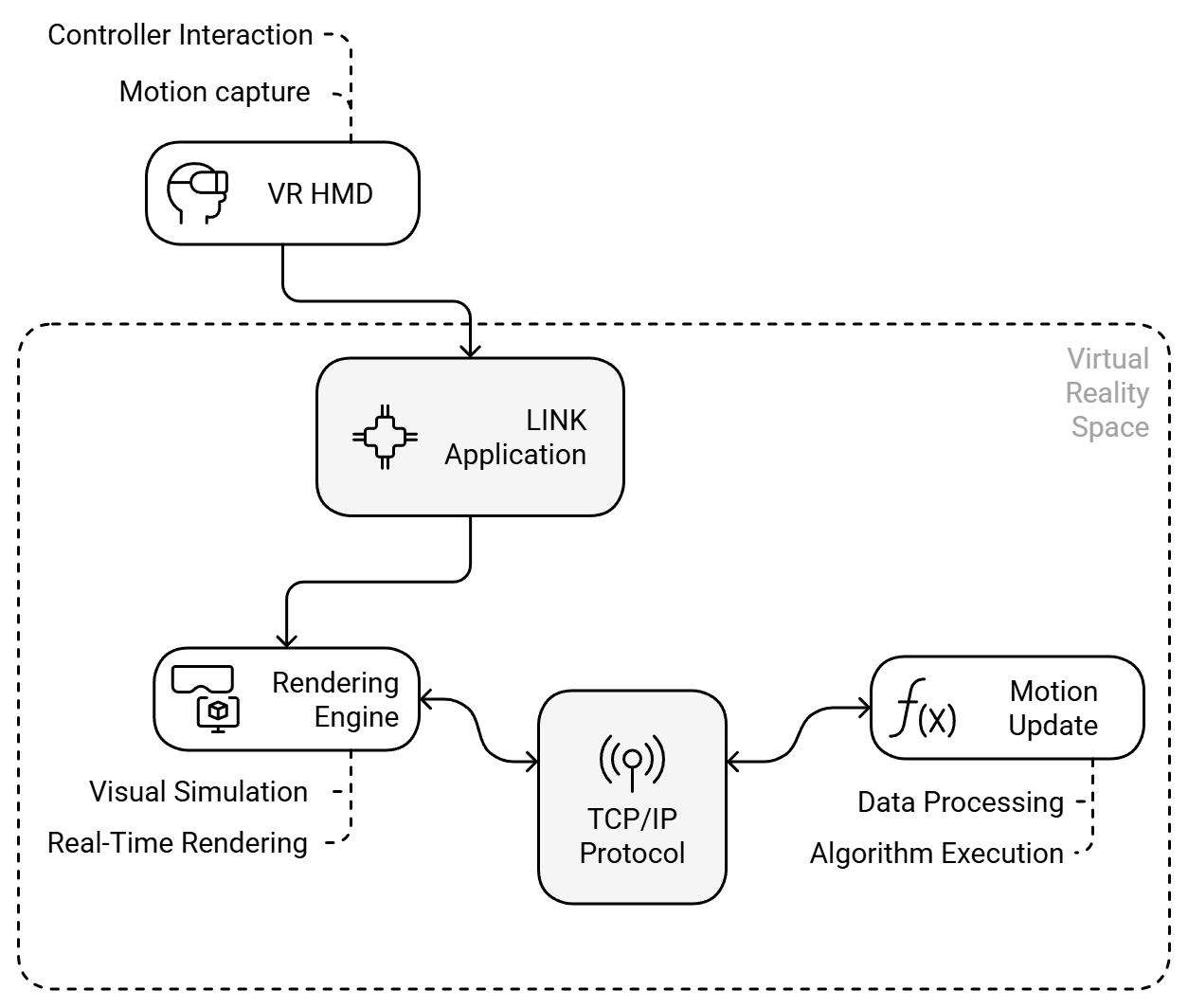
Для создания персонализированной терапевтической среды используется игровой движок Unreal Engine, обеспечивающий высокую степень кастомизации виртуального окружения. Это позволяет адаптировать виртуальную реальность к индивидуальным потребностям каждого пациента, изменяя параметры окружения, такие как сложность задач, визуальные стимулы и физические ограничения. Возможности движка позволяют создавать как реалистичные симуляции повседневных ситуаций, так и абстрактные тренировочные среды, что необходимо для эффективной реабилитации пациентов с различными двигательными нарушениями. Настройка окружения осуществляется на основе данных о состоянии пациента и целей терапии, обеспечивая оптимальную сложность и мотивацию.
Функциональность удаленного мониторинга позволяет клиницистам отслеживать показатели пациентов в режиме реального времени и корректировать терапевтические программы дистанционно. Система собирает данные о точности движений, скорости реакции и других ключевых параметрах, отображая их в удобном интерфейсе для специалиста. Это обеспечивает возможность оперативной адаптации упражнений к индивидуальному прогрессу пациента, оптимизацию нагрузки и повышение эффективности реабилитации. Данные, полученные в процессе удаленного мониторинга, также сохраняются для последующего анализа и формирования отчетов о динамике восстановления.
Искусство Движения: Интеллектуальное Управление и Естественность Траекторий
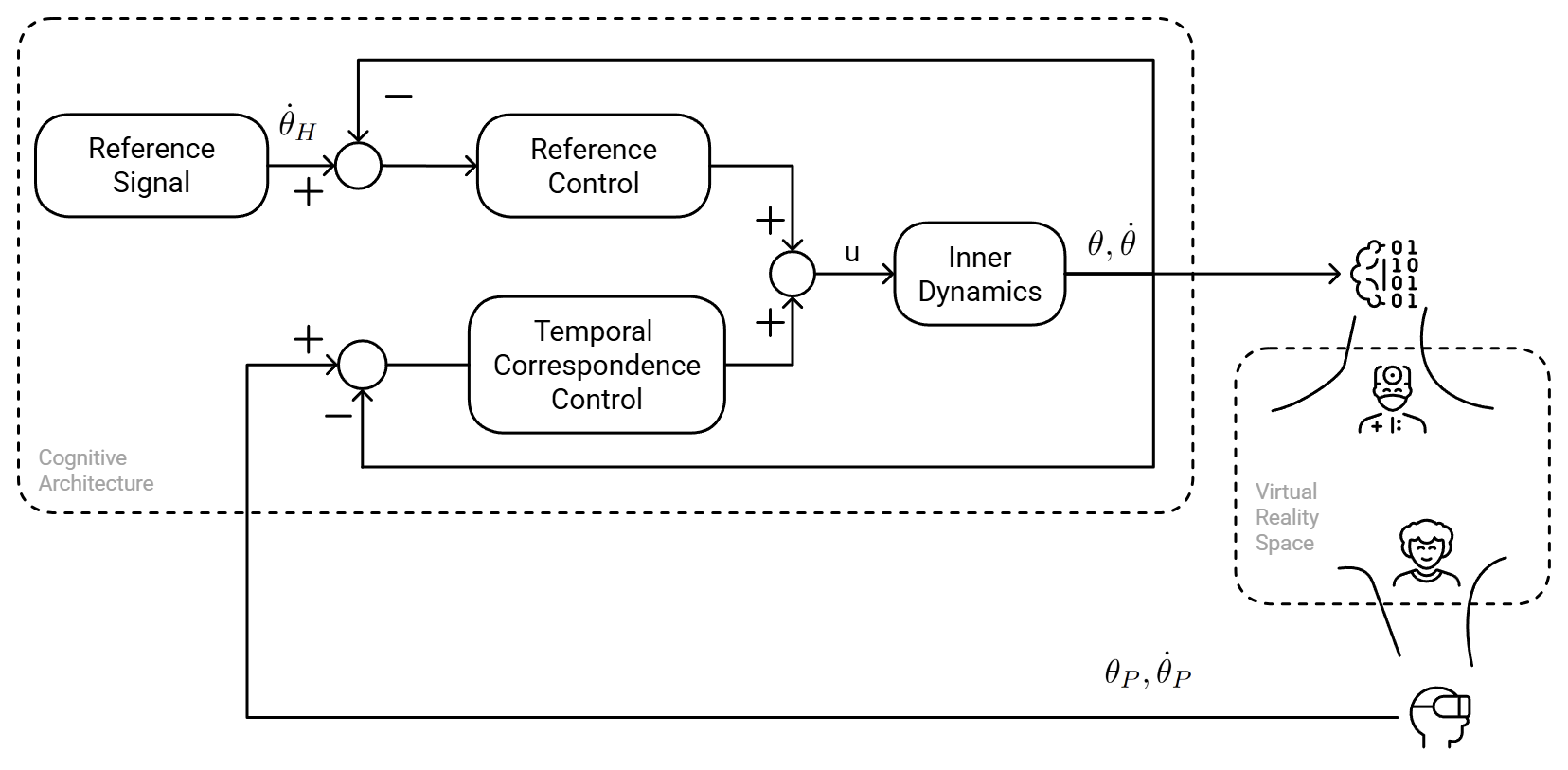
Для генерации естественных и плавных траекторий движения используется стратегия оптимального управления, основанная на модели Хогана. Модель Хогана предполагает, что человеческое движение характеризуется минимизацией определенных показателей, таких как $jerk$ (изменение ускорения), что позволяет создавать траектории, соответствующие биомеханическим особенностям человека. В рамках данной стратегии, система вычисляет оптимальную траекторию движения, учитывая начальные и конечные точки, ограничения скорости и ускорения, а также целевую функцию, направленную на минимизацию отклонений от естественных паттернов движения, определенных моделью Хогана. Это обеспечивает не только эффективность движения, но и его физиологическую обоснованность и комфорт для пациента.
Система использует адаптивное управление для индивидуальной настройки сложности задачи «Достижение цели» (Reaching Task) в зависимости от текущих возможностей пациента. Это достигается путем непрерывного мониторинга производительности пациента, включая скорость, точность и плавность движений. На основе этих данных, параметры задачи, такие как расстояние до цели, требуемая точность и время выполнения, динамически корректируются. В случае успешного выполнения, сложность задачи постепенно увеличивается, стимулируя дальнейшее улучшение двигательных навыков. Если пациент испытывает затруднения, сложность снижается для обеспечения возможности выполнения упражнения без фрустрации и поддержания мотивации. Алгоритм адаптивного управления обеспечивает персонализированный подход к реабилитации, максимизируя эффективность тренировок для каждого пациента.
Минимизация рывка ($jerk$) является ключевым аспектом обеспечения плавности и комфорта движений в системе. Траектории минимального рывка, основанные на математической оптимизации, стремятся к снижению производной ускорения во времени. Это позволяет избежать резких изменений в движении, которые могут вызывать дискомфорт или даже травмы у пациента. В реализации системы, алгоритм вычисляет траектории, которые минимизируют интеграл абсолютного значения рывка по времени, что обеспечивает наиболее естественное и физиологически обоснованное движение.
Для обеспечения персонализированной реабилитации и мотивации пациентов используется автономный виртуальный аватар. Аватар демонстрирует упражнения, выступая в роли визуального ориентира и обеспечивая обратную связь в режиме реального времени о правильности выполнения движений. Система оценивает траекторию движения пациента, сравнивая её с эталонной, и предоставляет мгновенные корректирующие указания. Данный подход позволяет адаптировать сложность упражнений к текущим возможностям пациента, а также отслеживать прогресс в процессе реабилитации, что способствует более эффективному восстановлению моторных функций.

Архитектура Системы и Интеграция Данных: Путь к Точности и Надежности
Для разработки алгоритмов управления и моделирования стратегии контроля в системе используется программный пакет MATLAB. Это позволяет проводить численное моделирование динамики системы, тестировать различные алгоритмы управления в виртуальной среде и оптимизировать параметры регуляторов перед внедрением в реальное устройство. В MATLAB реализованы алгоритмы расчета траекторий движения, обработки данных с датчиков и генерации управляющих сигналов. Возможность симуляции в MATLAB позволяет оценить эффективность стратегии управления и выявить потенциальные проблемы до проведения испытаний на физическом оборудовании, что снижает риски и сокращает время разработки.
Для обеспечения надежного обмена данными между VR-интерфейсом и вычислительным ядром на базе MATLAB используется протокол TCP/IP. Данный протокол гарантирует доставку пакетов данных в правильной последовательности и с проверкой на целостность, что критически важно для синхронизации виртуальной среды и результатов моделирования. Применение TCP/IP обеспечивает стабильную связь и минимизирует потери данных, что необходимо для поддержания высокой точности и отзывчивости системы, а также для корректной работы алгоритмов управления и оценки прогресса пациента.
Плавность движений оценивается с помощью Индекса Плавности (Smoothness Index), рассчитываемого на основе рывка ($jerk$ — производной ускорения) и верифицированного на соответствие Модели Хогана. Рывок, как мера изменения ускорения, напрямую коррелирует с ощущаемой пациентом комфортностью и эффективностью движения. Верификация по Модели Хогана, основанной на кинематическом анализе человеческих движений, обеспечивает валидность и надежность Индекса Плавности как показателя качества моторного контроля и реабилитационного прогресса. Использование рывка позволяет более точно характеризовать не только скорость, но и характер изменения скорости движения, что критически важно для оценки функционального восстановления.
Индекс способности (Ability Index) является комплексной метрикой, объединяющей данные о плавности движений, полученные на основе анализа рывков ($jerk$) и валидированные в соответствии с моделью Хогана. В ходе тестирования системы зафиксирована задержка передачи данных всего в 2 миллисекунды, что приводит к позиционной ошибке в 4 миллиметра. Данная низкая задержка и минимальная ошибка обеспечивают высокую точность отслеживания движений и надежность оценки прогресса пациента в процессе реабилитации.
Предварительные испытания с участием здоровых испытуемых продемонстрировали статистически значимое улучшение результатов выполнения упражнений при использовании ассистирующего аватара по сравнению с самостоятельным выполнением. Статистический анализ показал уровень значимости $P<0.1$, что указывает на высокую вероятность того, что наблюдаемое улучшение не является случайным. Данные, полученные в ходе этих испытаний, подтверждают потенциальную эффективность системы в улучшении моторных навыков и реабилитации пациентов.
Взгляд в Будущее: К Всеобъемлющей и Интеллектуальной Реабилитации
Для повышения универсальности системы реабилитации ведутся работы по расширению спектра предлагаемых упражнений и включению более сложных моторных задач. Вместо простых повторений, пациентам предлагаются сценарии, имитирующие повседневные действия, такие как приготовление пищи или ходьба по неровной поверхности. Это достигается за счет разработки алгоритмов, способных адаптировать сложность упражнений в режиме реального времени, учитывая индивидуальные возможности пациента и динамику восстановления. Внедрение подобных задач не только повышает мотивацию пациентов, но и способствует более эффективной перестройке нейронных связей, необходимых для восстановления утраченных функций. В перспективе, система сможет самостоятельно генерировать индивидуальные программы тренировок, учитывающие не только физическое состояние, но и когнитивные особенности пациента, приближая реабилитацию к максимально естественному процессу восстановления.
Внедрение алгоритмов машинного обучения открывает возможности для прогностической модели адаптации терапевтических программ к индивидуальным особенностям каждого пациента. Система, обученная на обширных данных о прогрессе восстановления, способна предсказывать эффективность различных упражнений и корректировать интенсивность тренировок в режиме реального времени. Такой подход позволяет не просто следовать заранее определенному плану, но и динамически адаптировать терапию, максимизируя результаты и сокращая сроки реабилитации. Алгоритмы могут выявлять закономерности, незаметные для человеческого глаза, предсказывая потенциальные трудности и предотвращая рецидивы, что в конечном итоге ведет к более эффективному и персонализированному процессу восстановления после инсульта.
Разработка полностью автоматизированной системы реабилитации, требующей минимального участия клинических специалистов, открывает новые перспективы для повышения доступности и масштабируемости лечения. Такая подход позволит значительно расширить охват реабилитационными мероприятиями, особенно для пациентов, проживающих в отдаленных районах или испытывающих трудности с посещением специализированных центров. Автоматизация рутинных задач, таких как мониторинг прогресса и адаптация упражнений, высвободит время квалифицированных специалистов для решения более сложных клинических задач и индивидуальной работы с пациентами, нуждающимися в особом внимании. В конечном итоге, это приведет к снижению стоимости лечения и повышению его эффективности, делая передовые методы восстановления доступными для большего числа людей, перенесших инсульт или другие неврологические заболевания.
Предлагаемая технология обладает потенциалом кардинально изменить подход к реабилитации после инсульта, открывая новые возможности для улучшения результатов лечения и повышения качества жизни миллионов людей. Благодаря возможности индивидуализации терапии и непрерывного мониторинга прогресса, пациенты смогут получать более эффективную помощь, направленную на восстановление утраченных функций. Автоматизация процесса реабилитации не только снижает нагрузку на медицинский персонал, но и обеспечивает доступность передовых методов восстановления для большего числа пациентов, включая тех, кто проживает в отдаленных районах или имеет ограниченный доступ к специализированной медицинской помощи. Перспективы внедрения данной технологии простираются от улучшения двигательных навыков и координации до восстановления когнитивных функций и психологической адаптации, что в конечном итоге ведет к повышению независимости и улучшению общего самочувствия пациентов после перенесенного инсульта.

Исследование демонстрирует, что виртуальная реальность способна стать не просто инструментом, но и своеобразным проводником в процессе восстановления двигательных функций после инсульта. Авторы предлагают систему, где аватар адаптируется к возможностям пациента, а оптимальное управление позволяет персонализировать терапию. Это не просто оптимизация точности движений, а скорее, украшение хаоса, попытка выстроить порядок из разрозненных импульсов. Как сказал Альбер Камю: «Всё, что убивает нас, делает нас сильнее». В данном контексте, эта фраза отражает суть адаптивного подхода: даже из ограниченных возможностей, через постоянную тренировку и персонализированную поддержку, возможно достичь значительного прогресса в восстановлении двигательных навыков, упорядочивая и направляя природный хаос восстановления.
Что дальше?
Представленная работа — лишь попытка укротить хаос нейропластичности. Создание виртуальной реальности, в которой аватар становится проводником восстановления, — шаг в сторону персонализированной терапии, но данные шепчут о гораздо большем. Модель Хогана — это карта, но ландшафт после инсульта уникален для каждого. Необходимо научиться не просто адаптировать параметры управления, а предсказывать, куда именно пойдёт этот непредсказуемый процесс восстановления, словно алхимик, пытающийся предвидеть цвет будущего металла.
Проблема не в метриках, а в их иллюзорной точности. Любой показатель улучшения — это лишь вежливая ложь, маскирующая истинную сложность. Следующим этапом представляется не столько повышение точности алгоритмов оптимального управления, сколько разработка методов интерпретации «странного» поведения модели — ведь если система начинает действовать непредсказуемо, возможно, она наконец-то начала думать, а не просто следовать заложенным инструкциям.
Перспективы лежат в области объединения данных о движениях с данными нейрофизиологической активности, в попытке создать систему, способную «чувствовать» намерения пациента и адаптироваться к ним в режиме реального времени. Это не просто создание «умного» протеза, а попытка восстановить утраченную связь между мозгом и телом, превратить шум в золото, хотя чаще получается медь. И в этом процессе не стоит забывать, что любое вмешательство — это лишь попытка уговорить хаос, а не покорить его.
Оригинал статьи: https://arxiv.org/pdf/2512.09667.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Российский рынок: Оптимизм на фоне трехсторонних переговоров – чего ждать 1 февраля? (25.01.2026 17:32)
- Сургутнефтегаз акции привилегированные прогноз. Цена SNGSP
- Российская экономика 2025: Рекорды энергопотребления, падение добычи и укрепление рубля (22.01.2026 17:32)
- Новые смартфоны. Что купить в январе 2026.
- Российский рынок: Оптимизм на фоне геополитики и корпоративных сделок (20.01.2026 00:32)
- Что такое виньетирование? Коррекция периферийного освещения в Кэнон.
- Типы дисплеев. Какой монитор выбрать?
- Xiaomi Redmi A3 Pro ОБЗОР: большой аккумулятор, удобный сенсор отпечатков
- Тепловая Сфера: Восстановление 3D-сцен из RGB и Тепловидения
- Google Pixel 10 Pro ОБЗОР: яркий экран, много памяти, беспроводная зарядка
2025-12-12 01:29