Автор: Денис Аветисян
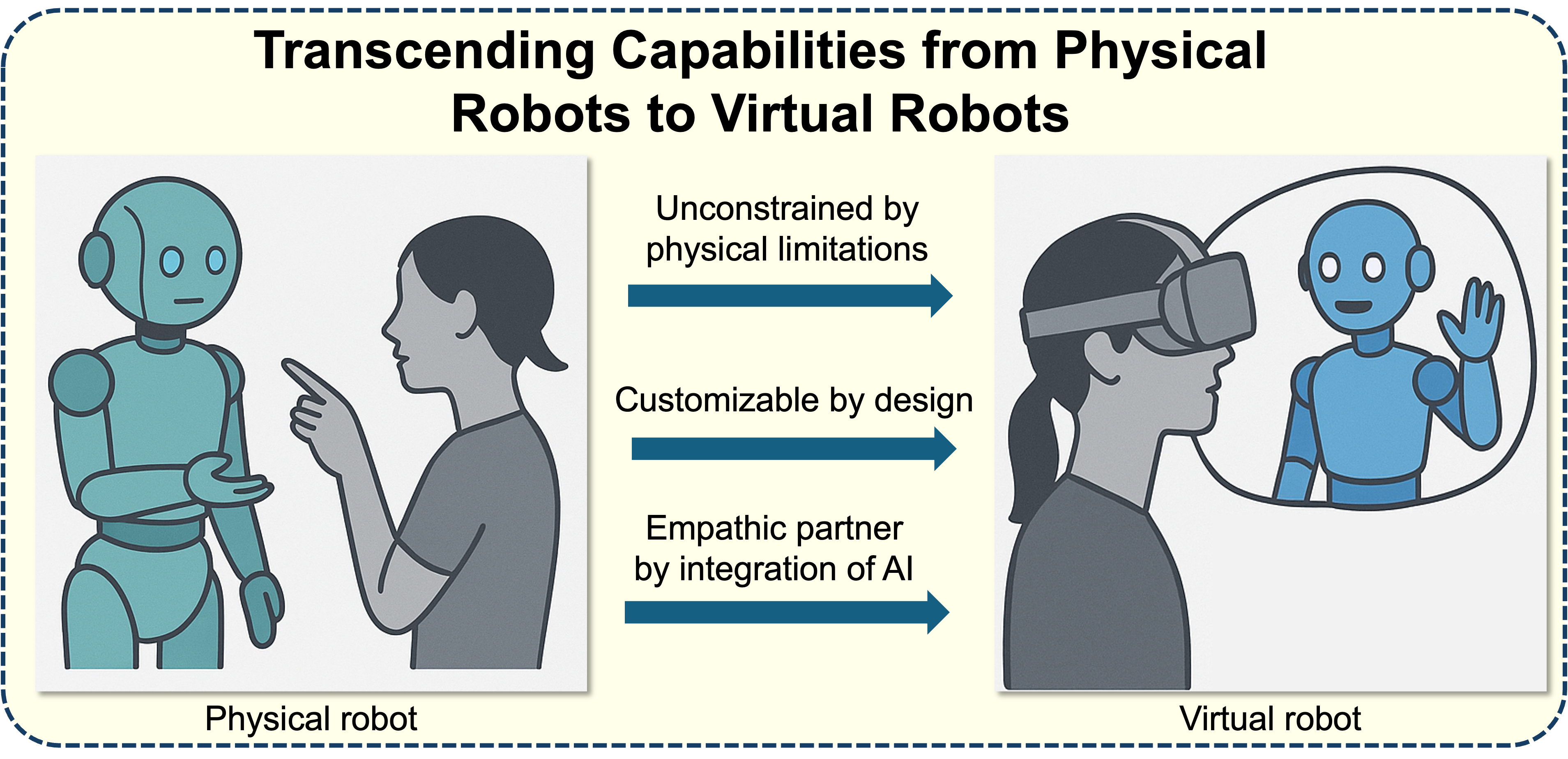
Расширенная реальность открывает возможности для создания более безопасных, интеллектуальных и эмпатичных роботов, не ограниченных физическими рамками.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
Обзор перспектив использования расширенной реальности и базовых моделей для создания виртуальных роботов и улучшения взаимодействия человека с искусственным интеллектом.
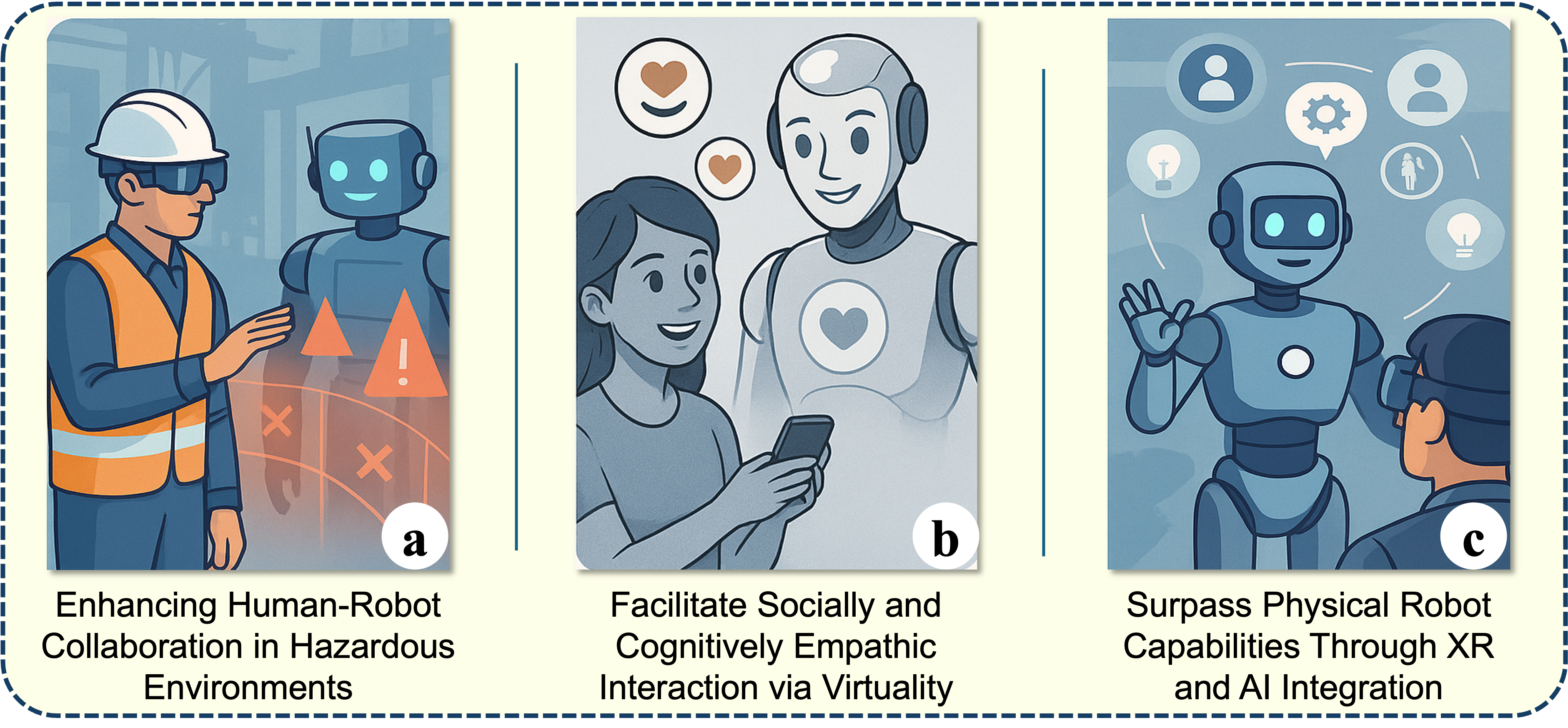
Несмотря на значительный прогресс в робототехнике, взаимодействие человека и робота часто ограничено физическими возможностями и сложностью адаптации. В настоящей статье, озаглавленной ‘Reframing Human-Robot Interaction Through Extended Reality: Unlocking Safer, Smarter, and More Empathic Interactions with Virtual Robots and Foundation Models’, предлагается переосмыслить данную область, используя возможности расширенной реальности и виртуальных роботов, управляемых большими языковыми моделями. Такой подход позволяет создавать более безопасные, интеллектуальные и эмпатичные взаимодействия, выходящие за рамки аппаратных ограничений. Какие этические и технологические вызовы предстоит преодолеть, чтобы в полной мере реализовать потенциал виртуальных роботов в будущем человеко-машинном взаимодействии?
От простоты к ясности: Эволюция взаимодействия человека и робота
Традиционное взаимодействие человека и робота (HRI) часто оказывается недостаточно гибким для выполнения сложных, совместных задач. Существующие подходы, как правило, сосредоточены на четко определенных командах и заранее запрограммированных реакциях, что препятствует адаптации к непредсказуемым ситуациям и тонким сигналам, передаваемым человеком. В результате, роботы испытывают трудности с пониманием намерений, контекста и невербальных подсказок, что приводит к неэффективности и даже ошибкам в процессе сотрудничества. Отсутствие нюансов в интерпретации человеческих действий ограничивает возможности роботов в принятии самостоятельных решений и проактивной помощи, снижая общий уровень продуктивности и затрудняя формирование настоящего партнерства между человеком и машиной.
Существующие подходы к интеграции виртуальных агентов в реальные, сложные сценарии зачастую сталкиваются с серьезными ограничениями в плане адаптивности. Проблема заключается в том, что большинство систем не способны адекватно реагировать на непредсказуемые изменения в окружающей среде или на действия человека, что приводит к неестественному и неэффективному взаимодействию. Виртуальные агенты, обученные в контролируемых лабораторных условиях, демонстрируют значительное снижение производительности при столкновении с шумом, неопределенностью и динамичностью реального мира. Особенно остро это проявляется в задачах, требующих совместной работы, где необходимо учитывать контекст, намерения и невербальные сигналы человека. В результате, существующие системы часто оказываются неспособными к полноценному сотрудничеству и требуют постоянного вмешательства оператора для коррекции ошибок и поддержания работоспособности.
Для реализации полного потенциала сотрудничества человека и робота крайне важны более захватывающие и интуитивно понятные интерфейсы. Традиционные методы взаимодействия часто оказываются недостаточно эффективными для сложных задач, требующих гибкости и адаптации. Исследования показывают, что чем более естественным и понятным является интерфейс, тем легче человеку взаимодействовать с роботом, повышается эффективность совместной работы и снижается когнитивная нагрузка. Разработка интерфейсов, которые позволяют пользователю взаимодействовать с роботом посредством жестов, голоса или даже мысленных команд, открывает новые возможности для совместной работы в различных сферах, от производства и медицины до образования и развлечений. Повышение уровня погружения в процесс взаимодействия, например, с использованием технологий виртуальной и дополненной реальности, способствует более эффективному обмену информацией и лучшему пониманию намерений друг друга, что является ключевым фактором для успешного сотрудничества.
Расширенная реальность (XR) представляет собой перспективный подход к преодолению разрыва между человеком и роботом, открывая возможности для более естественного и эффективного взаимодействия. В отличие от традиционных интерфейсов, XR позволяет интегрировать виртуальные элементы в реальное окружение, создавая эффект полного погружения и обогащая опыт совместной работы. Исследования показывают, что использование XR-технологий, таких как виртуальная реальность (VR) и дополненная реальность (AR), значительно улучшает восприятие и понимание действий робота, облегчая координацию и повышая общую производительность. Благодаря XR, пользователи могут взаимодействовать с роботами интуитивно, используя жесты, голос и даже мимику, что способствует более тесному и продуктивному сотрудничеству в различных областях, от промышленного производства до медицины и образования. Перспективы развития XR-технологий в контексте взаимодействия человека и робота обещают создание интеллектуальных систем, способных адаптироваться к потребностям пользователя и обеспечивать бесшовный опыт совместной работы.
Виртуальные роботы: Экономия и масштабируемость в действии
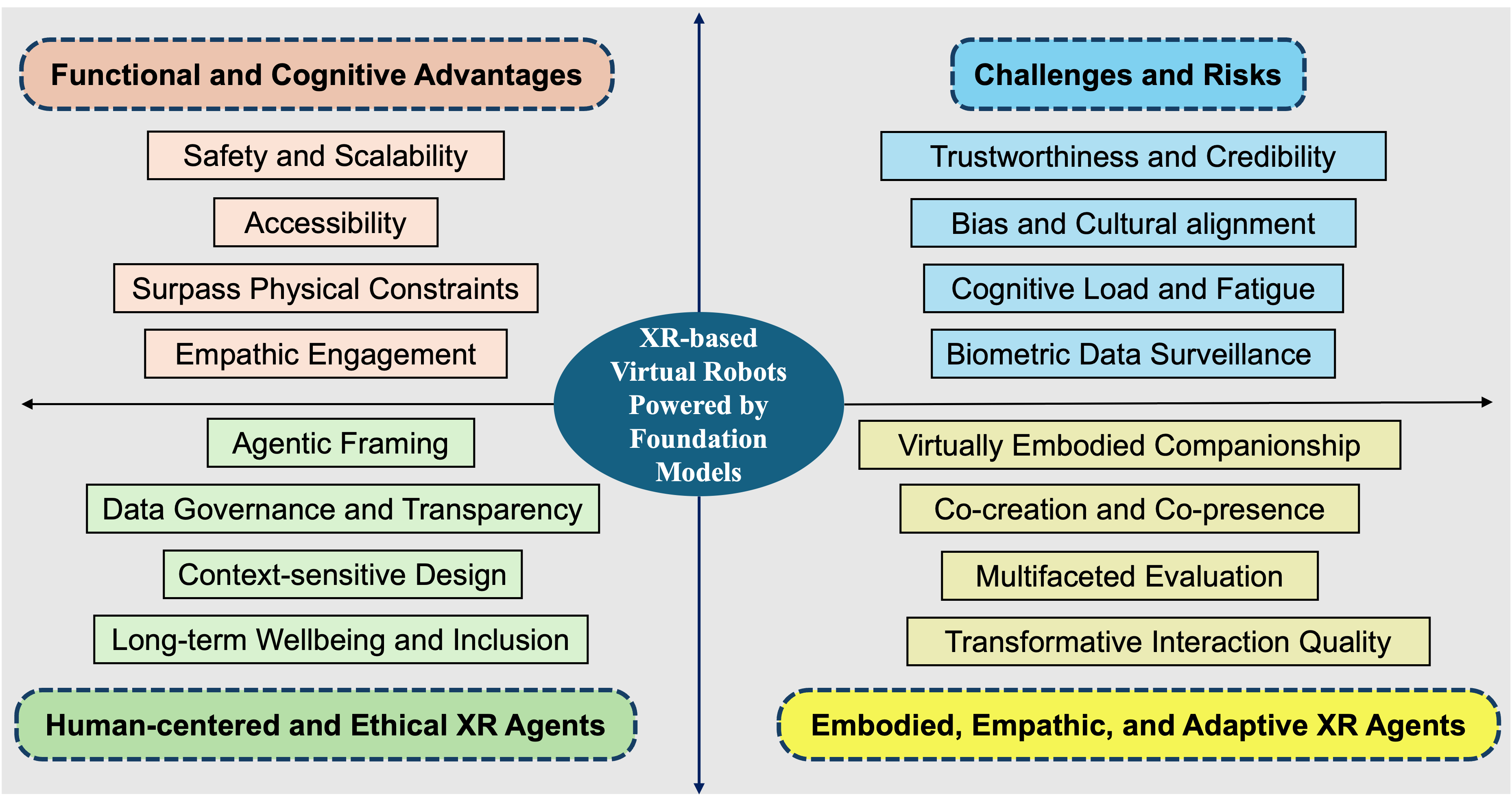
Виртуальные роботы, функционирующие исключительно в средах расширенной реальности (XR), представляют собой экономически эффективную и масштабируемую альтернативу физическим роботам для целей обучения и прототипирования. В отличие от разработки и поддержки физических платформ, виртуальные роботы не требуют затрат на аппаратное обеспечение, техническое обслуживание или логистику. Это позволяет организациям проводить обширные испытания различных сценариев и алгоритмов управления без значительных финансовых вложений. Масштабируемость обеспечивается возможностью одновременного развертывания и управления большим количеством виртуальных роботов в цифровой среде, что невозможно с физическими аналогами. Такая модель позволяет значительно ускорить процесс разработки и валидации роботизированных систем.
Виртуальные роботы, функционирующие исключительно в средах расширенной реальности (XR), используют в качестве основы большие фундаментальные модели (Foundation Models) для обеспечения продвинутых возможностей восприятия и рассуждений. Эти модели, обученные на огромных объемах данных, позволяют виртуальным роботам анализировать сенсорную информацию, понимать окружающую среду и принимать решения без явного программирования для каждого конкретного сценария. Ключевыми компонентами являются большие языковые модели (LLM), большие модели зрения (LVM) и мультимодальные модели, объединяющие возможности обработки языка и зрения, что позволяет виртуальным роботам взаимодействовать с окружающей средой и понимать человеческие команды на естественном языке.
Интеллектуальные виртуальные роботы в значительной степени зависят от моделей больших языков (LLM), моделей обработки изображений (LVM) и мультимодальных моделей, объединяющих текст и зрение (VLM). LLM обеспечивают возможности обработки естественного языка для понимания команд и генерации ответов. LVM предоставляют возможность анализа визуальной информации, распознавания объектов и понимания окружающей среды. VLM, объединяя возможности LLM и LVM, позволяют виртуальным роботам интерпретировать как текстовые инструкции, так и визуальные данные, что необходимо для сложных задач, таких как навигация, манипулирование объектами и взаимодействие с виртуальной средой. Эффективность и функциональность виртуальных роботов напрямую связаны с масштабом и архитектурой используемых LLM, LVM и VLM.
Цифровые двойники играют ключевую роль в моделировании и совершенствовании поведения как виртуальных, так и физических роботов. Они представляют собой виртуальные копии реальных систем, позволяя разработчикам тестировать алгоритмы, оптимизировать параметры и прогнозировать производительность в различных сценариях без риска повреждения оборудования или нарушения реальных процессов. Данные, собранные с физических роботов, используются для обновления и калибровки цифровых двойников, обеспечивая высокую точность моделирования. Этот процесс итеративного обновления позволяет выявлять и устранять недостатки в программном обеспечении и аппаратной части, а также проводить обучение роботов в безопасной и контролируемой среде, значительно сокращая время и затраты на разработку и внедрение.

Безопасность и доверие: Основа успешного сотрудничества
Безопасное взаимодействие человека и виртуального робота (Safety-Aware HRI) является основополагающим для эффективного сотрудничества. Это предполагает разработку систем, которые способны предвидеть потенциальные опасности и предотвращать столкновения или другие нежелательные взаимодействия. Ключевые аспекты включают в себя точное отслеживание положения человека и робота в общем пространстве, прогнозирование траекторий движения и динамическую адаптацию поведения робота для обеспечения безопасности. Реализация таких систем требует использования передовых алгоритмов восприятия, планирования и управления, а также учета когнитивных и физических ограничений как человека, так и робота. Недостаточное внимание к безопасности может привести к снижению доверия к системе, ограничению ее функциональности и даже к физическим травмам.
Визуализация опасностей, осуществляемая посредством технологий расширенной реальности (XR), предоставляет пользователям возможность прогнозировать и избегать потенциальные риски в рабочей среде робота. XR-интерфейсы накладывают виртуальные представления опасностей — например, зоны столкновения, области повышенной температуры или потенциальные препятствия — непосредственно на реальное или виртуальное окружение. Это позволяет оператору или сотрудничающему работнику заранее идентифицировать угрозы, планировать безопасные траектории движения робота и своевременно реагировать на изменяющиеся условия, значительно снижая вероятность аварийных ситуаций и повышая общую безопасность совместной работы. Точность и своевременность предоставляемой информации напрямую зависят от точности сенсорных данных, используемых для построения виртуальной модели окружения и определения потенциальных опасностей.
Дистанционное телеуправление, дополненное интерфейсами расширенной реальности (XR), значительно повышает ситуационную осведомленность и контроль оператора над виртуальным роботом. Интеграция XR обеспечивает наложение виртуальной информации о состоянии робота, его окружении и потенциальных опасностях непосредственно на реальное поле зрения оператора. Это позволяет оператору более эффективно оценивать обстановку, прогнозировать траектории движения робота и своевременно реагировать на изменяющиеся условия. В частности, использование XR-интерфейсов позволяет визуализировать данные с датчиков робота, такие как данные лидара, камеры и датчиков силы, в режиме реального времени, что повышает точность управления и снижает риск столкновений или других нежелательных событий. Более того, улучшенная визуализация позволяет оператору более интуитивно управлять роботом, снижая когнитивную нагрузку и повышая эффективность совместной работы.
Виртуальные агенты, способные к эмпатии, строятся на основе анализа невербальных сигналов человека, таких как выражение лица, тон голоса и язык тела, посредством использования сенсоров и алгоритмов машинного обучения. Эти агенты используют полученные данные для определения эмоционального состояния пользователя и адаптации своего поведения, что проявляется в изменении тональности речи, мимики и жестов. Такая адаптация направлена на установление взаимопонимания и доверия, что критически важно для эффективного взаимодействия человека и робота, особенно в задачах, требующих совместной работы и координации действий. Повышение уровня доверия к виртуальному агенту снижает когнитивную нагрузку на человека и способствует более плавному и продуктивному сотрудничеству.
Погружение и социальное присутствие: Ключ к эффективному взаимодействию
Виртуальное воплощение, или возможность для пользователя взаимодействовать с цифровой средой посредством виртуального тела, играет ключевую роль в усилении ощущения присутствия. Исследования показывают, что когда человек ощущает себя «внутри» цифрового аватара, его мозг начинает обрабатывать виртуальные стимулы аналогично реальным. Это происходит за счёт синхронизации движений аватара с движениями пользователя, а также визуальной обратной связи, создающей иллюзию физического присутствия в виртуальном пространстве. Такой эффект особенно важен для приложений, требующих высокой степени вовлеченности и реалистичности, например, в обучении, терапии или развлечениях, позволяя пользователю глубже погрузиться в происходящее и ощутить себя полноценным участником виртуальных событий.
Тактильная обратная связь, или haptic feedback, играет ключевую роль в усилении эффекта погружения в виртуальную и дополненную реальность. Она позволяет пользователям не только видеть и слышать виртуальные объекты, но и ощущать их прикосновения, текстуру и сопротивление. Эта возможность значительно повышает реалистичность взаимодействия, поскольку человеческое восприятие мира во многом основано на тактильных ощущениях. Различные технологии, от простых вибрационных устройств до сложных экзоскелетов, воспроизводят широкий спектр ощущений, позволяя пользователю, например, почувствовать вес виртуального предмета или сопротивление при нажатии на виртуальную кнопку. В результате взаимодействия становятся более интуитивными и правдоподобными, что способствует более глубокому вовлечению и запоминающемуся опыту.
В средах расширенной реальности (XR) взаимодействие множества агентов открывает новые возможности для совместного решения задач. Исследования показывают, что когда пользователи взаимодействуют с другими виртуальными сущностями, они демонстрируют повышенную мотивацию и эффективность в решении сложных проблем. Такой подход позволяет распределять задачи между участниками, используя сильные стороны каждого, что приводит к более креативным и оптимальным решениям. Особенно важным является возможность обмена информацией и координации действий в режиме реального времени, что значительно улучшает процесс принятия решений и повышает общую производительность группы. Более того, совместное решение задач в XR способствует развитию навыков командной работы и улучшает социальную адаптацию участников.
Исследования показывают, что калибровка доверия, осуществляемая посредством эмпатичных виртуальных агентов, играет ключевую роль в эффективном взаимодействии человека и робота в расширенной реальности. В процессе взаимодействия пользователи склонны оценивать возможности виртуального робота и формировать уровень доверия, который напрямую влияет на их готовность полагаться на его помощь. Эмпатичные агенты, проявляющие понимание и реагирующие на эмоциональное состояние пользователя, позволяют более точно откалибровать это доверие, избегая как чрезмерной зависимости, так и необоснованного недоверия. Такой подход позволяет оптимизировать совместное решение задач, повышая эффективность и безопасность взаимодействия, поскольку пользователь адекватно оценивает компетенции виртуального помощника и использует его возможности в полной мере.
Будущее совместной робототехники: От возможностей к перспективам
Технологии расширенной реальности (XR), включающие виртуальную и дополненную реальность, обещают кардинально изменить подходы к обучению, проектированию и удалённому управлению роботами в различных отраслях промышленности. Вместо традиционных методов, требующих дорогостоящего оборудования и физического присутствия, специалисты смогут погружаться в реалистичные симуляции, отрабатывать сложные сценарии взаимодействия с роботами и тестировать новые прототипы в виртуальной среде. Это позволит значительно сократить затраты на обучение персонала, ускорить процесс разработки и внедрения робототехнических систем, а также обеспечить безопасное управление роботами в опасных или труднодоступных местах, например, при обслуживании космических аппаратов или ликвидации последствий аварий. Возможность удалённого управления роботами с использованием XR-интерфейсов открывает новые перспективы для автоматизации процессов и повышения эффективности работы в самых разных сферах, от производства и логистики до медицины и сельского хозяйства.
Интеграция передовых базовых моделей — мощных алгоритмов, обученных на огромных массивах данных — открывает новую эру в развитии робототехники. Эти модели позволяют роботам не просто выполнять заранее запрограммированные действия, но и демонстрировать впечатляющую способность к адаптации и обучению в реальном времени. Благодаря этому, роботы смогут эффективно функционировать в непредсказуемых и динамично меняющихся условиях, самостоятельно решать сложные задачи и даже предвидеть потенциальные проблемы. Вместо жесткого следования инструкциям, роботы, оснащенные базовыми моделями, способны к обобщению знаний, переносу опыта из одной ситуации в другую и творческому решению проблем, что значительно расширяет спектр их применения в промышленности, логистике, медицине и других областях. Это не просто повышение производительности, а создание действительно интеллектуальных систем, способных к полноценному взаимодействию с человеком и окружающей средой.
Успешное взаимодействие человека и робота в будущем напрямую зависит от развития у роботов так называемого “социального присутствия” и, как следствие, доверия со стороны человека. Исследования показывают, что роботы, способные демонстрировать эмпатию, распознавать невербальные сигналы и адаптировать свое поведение к эмоциональному состоянию партнера, вызывают больше симпатии и готовности к сотрудничеству. Это достигается за счет использования продвинутых алгоритмов машинного обучения, позволяющих роботам не просто выполнять команды, а учитывать контекст взаимодействия и проявлять инициативу. Повышение уровня доверия к роботам позволяет перейти от простого управления к партнерству, где человек и робот совместно решают сложные задачи, используя сильные стороны каждого, что особенно важно в таких областях, как здравоохранение, образование и промышленность.
Представляется, что слияние передовых технологий, таких как расширенная реальность и модели-основы, ведет к трансформации роли роботов. Вместо простого инструмента, выполняющего заданные действия, роботы становятся полноценными партнерами в решении сложных задач. Это предполагает не только автоматизацию рутинных процессов, но и совместное планирование, адаптацию к меняющимся условиям и даже креативное взаимодействие с человеком. Такое сотрудничество особенно перспективно в областях, требующих гибкости, инноваций и способности к обучению, например, в науке, медицине и инженерном деле. В будущем, роботы смогут не просто ассистировать специалистам, а совместно с ними разрабатывать новые решения, ускоряя прогресс и открывая новые горизонты в различных областях человеческой деятельности.
Исследование возможности взаимодействия человека и робота посредством расширенной реальности представляет собой стремление к предельной ясности коммуникации. Авторы предлагают отойти от ограничений физического воплощения, чтобы сконцентрироваться на создании более безопасных и эмпатичных взаимодействий. Это соответствует принципу, сформулированному Кеном Томпсоном: «Сложность — это тщеславие. Ясность — милосердие». Использование виртуальных роботов, управляемых фундаментальными моделями, позволяет отфильтровать ненужные детали, упростить интерфейс и сосредоточиться на сути взаимодействия. По сути, создается минималистичная модель коммуникации, где каждый элемент служит своей функции, а избыточность устраняется. Это соответствует идее плотности смысла, где каждое действие и каждое сообщение имеют четкую цель и значение.
Куда же дальше?
Предложенное исследование, хотя и обнажает потенциал расширенной реальности в контексте взаимодействия человека и робота, лишь осторожно касается краешних проблем. Сведение сложности к элегантности — не просто эстетический выбор, но и императив в разработке систем, претендующих на «эмпатию». Иллюзия понимания, созданная мощными языковыми моделями, не должна заслонять фундаментальный вопрос: что есть «понимание» для машины, и как его отличить от искусно сгенерированного подобия? Безопасность, разумеется, важна, но истинный вызов — в проектировании не просто «безопасных», а полезных и, что более сложно, предсказуемых взаимодействий.
Очевидным направлением представляется переход от пассивного наблюдения к активному формированию опыта. Недостаточно создавать виртуальных роботов, способных отвечать на вопросы; необходимо проектировать среды, в которых взаимодействие становится органичной частью процесса обучения и адаптации как для человека, так и для машины. Впрочем, стоит помнить: любая «умная» система — это лишь отражение тех упрощений, которые разработчик посчитал допустимыми.
И, пожалуй, самое важное: не стоит увлекаться созданием всё более сложных симуляций. Иногда, самое эффективное решение — это не добавление новых функций, а избавление от ненужных. Истинная красота, как известно, в простоте. В конечном итоге, задача состоит не в том, чтобы построить робота, неотличимого от человека, а в том, чтобы создать инструмент, расширяющий возможности человека, не утяжеляя его существование.
Оригинал статьи: https://arxiv.org/pdf/2512.02569.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Санкционный удар по России: Минфин США расширяет список ограничений – что ждет экономику? (25.02.2026 05:32)
- Новые смартфоны. Что купить в марте 2026.
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- vivo X300 FE ОБЗОР: скоростная зарядка, беспроводная зарядка, плавный интерфейс
- Microsoft Edge позволяет воспроизводить YouTube в фоновом режиме на Android — подписка Premium не требуется.
- Восстановление 3D и спектрального изображения растений с помощью нейронных сетей
- МосБиржа на подъеме: что поддерживает рынок и какие активы стоит рассмотреть? (27.02.2026 22:32)
- Ближний Восток и Рубль: Как Геополитика Перекраивает Российский Рынок (02.03.2026 20:32)
- Российский рынок в 2025: Инвестиции, Экспорт и Новые Возможности (27.02.2026 15:32)
- Как правильно фотографировать портрет
2025-12-03 07:10