Автор: Денис Аветисян
Новая система управления позволяет человеку комфортно взаимодействовать с несколькими роботизированными конечностями, снижая нагрузку на опорно-двигательный аппарат.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
Исследование предлагает инновационную систему управления для сверхкомплектных роботизированных тел, использующую кинестетическую обратную связь и виртуальные фиксаторы для обеспечения эргономики при манипуляциях и перемещении.
Несмотря на потенциал совместных роботов в расширении физических возможностей человека, длительное взаимодействие с ними может приводить к неудобным позам и риску травм. В данной работе, посвященной ‘Postural Virtual Fixtures for Ergonomic Physical Interactions with Supernumerary Robotic Bodies’, предложен новый подход к управлению дополнительными роботизированными телами, использующий кинестетическую обратную связь и виртуальные фиксаторы для поддержания эргономичной позы оператора. Экспериментальные исследования показали, что разработанная система способствует формированию правильных привычек и улучшает комфорт при выполнении задач локо-манипуляции. Возможно ли дальнейшее развитие данного подхода для адаптации к индивидуальным особенностям оператора и различным типам задач?
Эргономический Вызов Современных Задач
В современной рабочей среде всё чаще встречаются длительные манипулятивные задачи и задачи удалённой локомоции-манипуляции, особенно в промышленности и сфере обслуживания. Эти виды деятельности, требующие продолжительного выполнения повторяющихся движений или работы на расстоянии от тела, создают значительные эргономические риски для операторов. Длительное статическое напряжение мышц, неудобные позы и необходимость совершать усилия на вытянутых конечностях приводят к повышенной утомляемости, локальным болям в мышцах и суставах, а также к развитию профессиональных заболеваний опорно-двигательного аппарата. Особенно уязвимы операторы, занятые в сборке сложных устройств, упаковке продукции, а также в управлении дистанционно управляемыми системами, где требуется постоянное поддержание концентрации и точности движений на протяжении длительного времени. Поэтому, анализ и минимизация этих рисков становится критически важной задачей для обеспечения безопасности и эффективности труда.
Традиционные подходы к организации рабочих мест и обучению операторов зачастую оказываются неэффективными при выполнении современных, динамически изменяющихся задач, связанных с продолжительной манипуляцией объектами и перемещением на значительные расстояния. Эти подходы, как правило, ориентированы на статические позы и не учитывают постоянную необходимость изменения положения тела, что приводит к перенапряжению мышц, утомлению и повышенному риску развития профессиональных заболеваний опорно-двигательного аппарата. Неспособность адекватно реагировать на динамические нагрузки приводит к нарушению естественных биомеханических паттернов, вызывая локальные микротравмы и, в конечном итоге, хронические болевые синдромы. Исследования показывают, что игнорирование этих факторов существенно снижает производительность и увеличивает вероятность ошибок, что особенно критично в сферах, требующих высокой точности и внимательности.
Поддержание оптимальной эргономической позы имеет решающее значение для продолжительной работоспособности и благополучия оператора, особенно в условиях современной производственной среды. Исследования показывают, что даже незначительные отклонения от правильной осанки при выполнении монотонных или требующих высокой точности задач приводят к быстрому накоплению усталости, снижению концентрации внимания и увеличению риска развития мышечно-скелетных заболеваний. Поэтому, разработка инновационных решений, направленных на поддержание естественного положения тела, адаптацию рабочего пространства к индивидуальным особенностям оператора и снижение статической нагрузки на мышцы, является приоритетной задачей для повышения эффективности и безопасности труда. Актуальные исследования фокусируются на использовании активных экзоскелетов, интеллектуальных систем поддержки осанки и адаптивных рабочих станций, способных динамически реагировать на изменения в позе и обеспечивать оптимальную биомеханическую поддержку.
В условиях возрастающей сложности и продолжительности манипулятивных задач, а также задач, требующих перемещения на значительные расстояния, полагаться исключительно на физические возможности человека становится все более проблематично. Ограниченность человеческой выносливости, точности и способности адаптироваться к динамическим нагрузкам приводит к повышенному риску возникновения переутомления, травм опорно-двигательного аппарата и снижению общей производительности. В связи с этим, активно исследуется возможность применения коллаборативных роботизированных систем — роботов, способных работать бок о бок с человеком, дополняя его возможности и беря на себя наиболее тяжелые и монотонные операции. Такой симбиоз позволяет снизить физическую нагрузку на оператора, повысить точность и скорость выполнения задач, а также обеспечить более безопасные и эргономичные условия труда, открывая новые перспективы в области автоматизации и повышения эффективности производства.
SRB: Адаптивная Поддержка Оператора
Фреймворк управления SRB (Supernumerary Robotic Body) предназначен для поддержания эргономичной позы оператора посредством адаптации в реальном времени. Система непрерывно анализирует положение тела оператора и динамически корректирует поддержку со стороны SRB, предотвращая возникновение вредных поз и снижая физическую нагрузку. Адаптация осуществляется на основе данных, получаемых от сенсоров и алгоритмов, обеспечивающих плавную и точную реакцию SRB на движения и изменения в позе оператора. Основная цель — обеспечить комфортную и безопасную рабочую среду, минимизируя риск возникновения профессиональных заболеваний, связанных с неправильной осанкой и перенапряжением мышц.
В рамках системы управления SRB используются кинестетическая обратная связь и виртуальные фиксаторы для мягкого направления оператора к оптимальным конфигурациям тела, предотвращая развитие вредных поз. Кинестетическая обратная связь предоставляет тактильные ощущения, имитирующие сопротивление или поддержку, направляя движения оператора в безопасное русло. Виртуальные фиксаторы создают невидимые ограничения в пространстве, ограничивая нежелательные движения и направляя оператора к эргономически правильным положениям. Комбинация этих технологий позволяет плавно корректировать позу оператора, минимизируя риск перенапряжения и травм, сохраняя при этом свободу и естественность движений.
Динамическая адаптация базы обеспечивает согласованность работы Супернумерарного Роботизированного Тела (СРТ) с оператором, предотвращая столкновения и оптимизируя доступность рабочей зоны. Данная функция реализуется посредством непрерывного мониторинга положения и движений оператора и соответствующей корректировки положения базы СРТ в режиме реального времени. Это достигается за счет использования датчиков положения и алгоритмов управления, которые предсказывают траекторию движения оператора и заранее адаптируют базу СРТ для поддержания безопасного и эффективного взаимодействия. В результате обеспечивается расширенный диапазон рабочих движений и снижение физической нагрузки на оператора, поскольку СРТ автоматически компенсирует изменения в его положении.
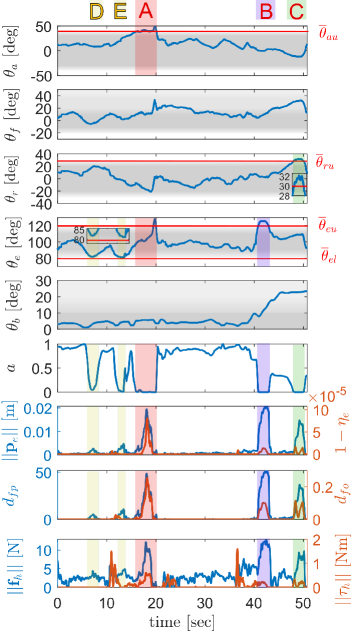
В основе SRB Control Framework лежит прецизионный мониторинг углов суставов оператора, осуществляемый с помощью встроенных датчиков и алгоритмов обработки данных. Получаемая информация о текущем положении конечностей в режиме реального времени используется для расчета оптимальных траекторий и уровней поддержки со стороны Supernumerary Robotic Body (SRB). Точные данные об углах суставов позволяют адаптировать алгоритмы управления, обеспечивая индивидуальную поддержку и предотвращая развитие нездоровых поз, а также формировать виртуальные фикстуры, направляющие движения оператора в эргономически безопасное русло. Такая система позволяет SRB динамически адаптироваться к особенностям анатомии и паттернам движения конкретного пользователя.
Точность Отслеживания и Сенсорные Технологии
В системе управления SRB для обеспечения надежного и точного мониторинга углов суставов используется комбинация отслеживания движения на основе инерциальных измерительных блоков (IMU) и визуального отслеживания. IMU-сенсоры регистрируют угловую скорость и ускорение, обеспечивая быстрое и непрерывное измерение ориентации сегментов тела. Визуальное отслеживание, в свою очередь, использует камеры и алгоритмы компьютерного зрения для определения положения суставов в пространстве. Комбинирование данных от обоих источников позволяет повысить точность и надежность системы, компенсируя ограничения каждого отдельного метода. Например, IMU обеспечивают устойчивость к окклюзиям, в то время как визуальное отслеживание позволяет корректировать дрифт IMU, обеспечивая долгосрочную стабильность измерений.
В дополнение к захвату движения используется датчик силы/момента, предоставляющий критически важные данные о силах, прикладываемых оператором. Эти данные позволяют системе прогнозировать и реагировать на потенциальное напряжение, возникающее в мышцах и суставах оператора. Датчики силы/момента измеряют величину и направление сил, воздействующих на элементы управления робота, что позволяет точно определить нагрузку и предотвратить перенапряжение. Полученные данные используются для динамической корректировки усилий робота, обеспечивая плавную и безопасную совместную работу человека и робота и минимизируя риск травм.
Комбинация различных сенсорных модальностей — инерциальных измерительных блоков (IMU) и систем машинного зрения — позволяет создать целостное представление о состоянии оператора. Совместная обработка данных, получаемых от этих источников, обеспечивает мониторинг не только углов суставов и положения тела, но и силы и момента, прикладываемых оператором. Такой комплексный подход позволяет системе SRB предвидеть возможные перегрузки и своевременно оказывать поддержку, корректируя положение тела оператора и предотвращая возникновение усталости или травм. Проактивная поддержка, основанная на данных от сенсоров, является ключевым фактором обеспечения комфортной и эффективной совместной работы человека и робота.
Взаимодействие технологий точного отслеживания и сенсорики обеспечивает получение комплексных данных, необходимых для управления действиями системы SRB и реализации плавного, интуитивно понятного взаимодействия человека и робота. Объединение данных, полученных от инерциальных измерительных блоков (IMU) и систем машинного зрения для мониторинга углов суставов, с информацией о силах и моментах, воздействующих на оператора, позволяет системе SRB формировать детальное представление о состоянии пользователя. Эти данные используются для прогнозирования намерений оператора, адаптации траекторий движения робота и обеспечения проактивной поддержки, минимизируя физическую нагрузку и повышая эффективность совместной работы.

Валидация Исследования и Эффект Обучения
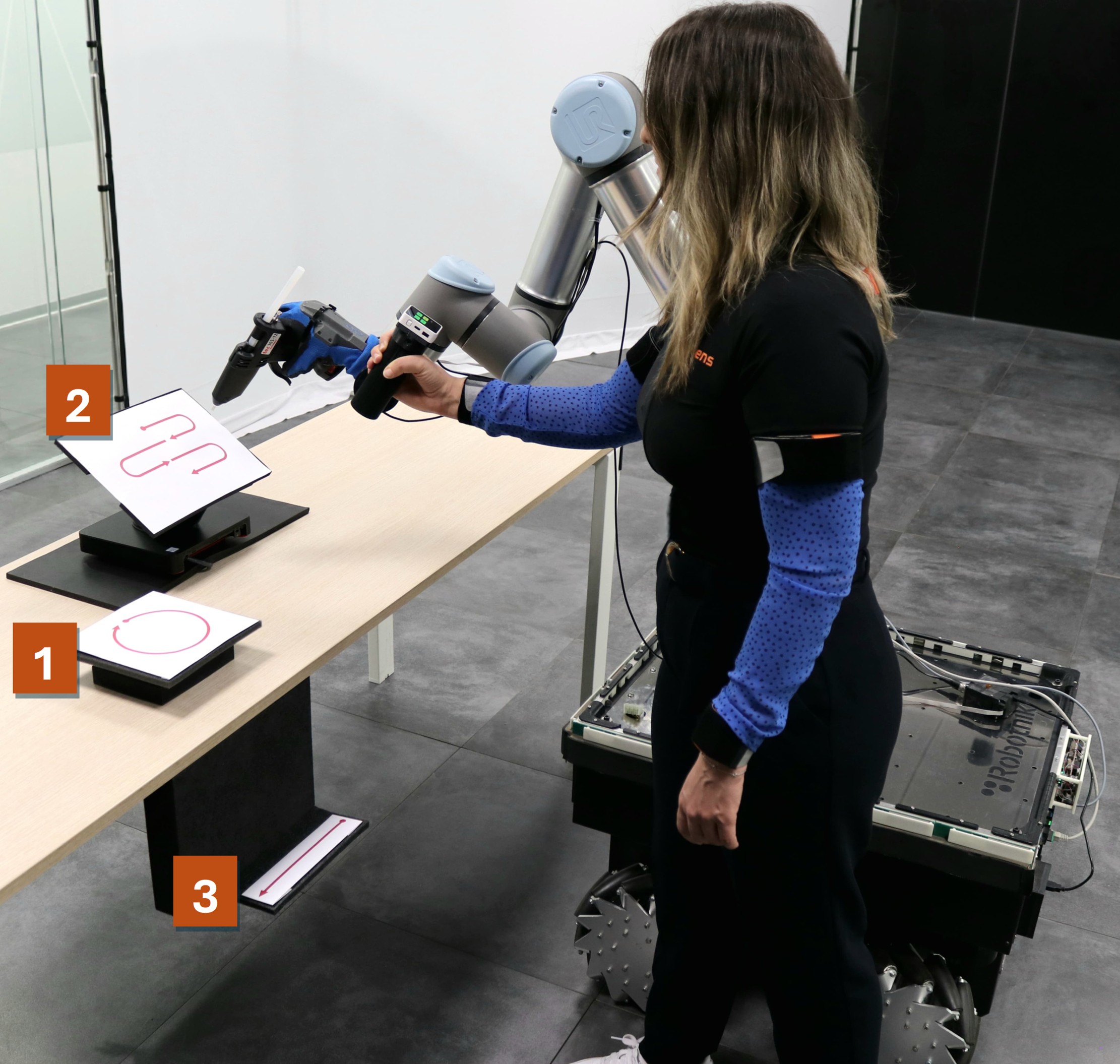
Для оценки эффективности системы управления SRB в условиях, приближенных к реальным рабочим задачам, было проведено пользовательское исследование. В ходе исследования участники выполняли как продолжительные манипулятивные задачи, так и задачи перемещения на значительные расстояния с манипуляциями. Целью являлось измерение влияния системы на физическую нагрузку операторов и эргономику рабочей позы. Полученные данные позволили выявить значительное снижение напряжения и улучшение эргономических показателей при использовании SRB Control Framework, что демонстрирует ее потенциал для повышения комфорта и производительности труда в различных областях применения.
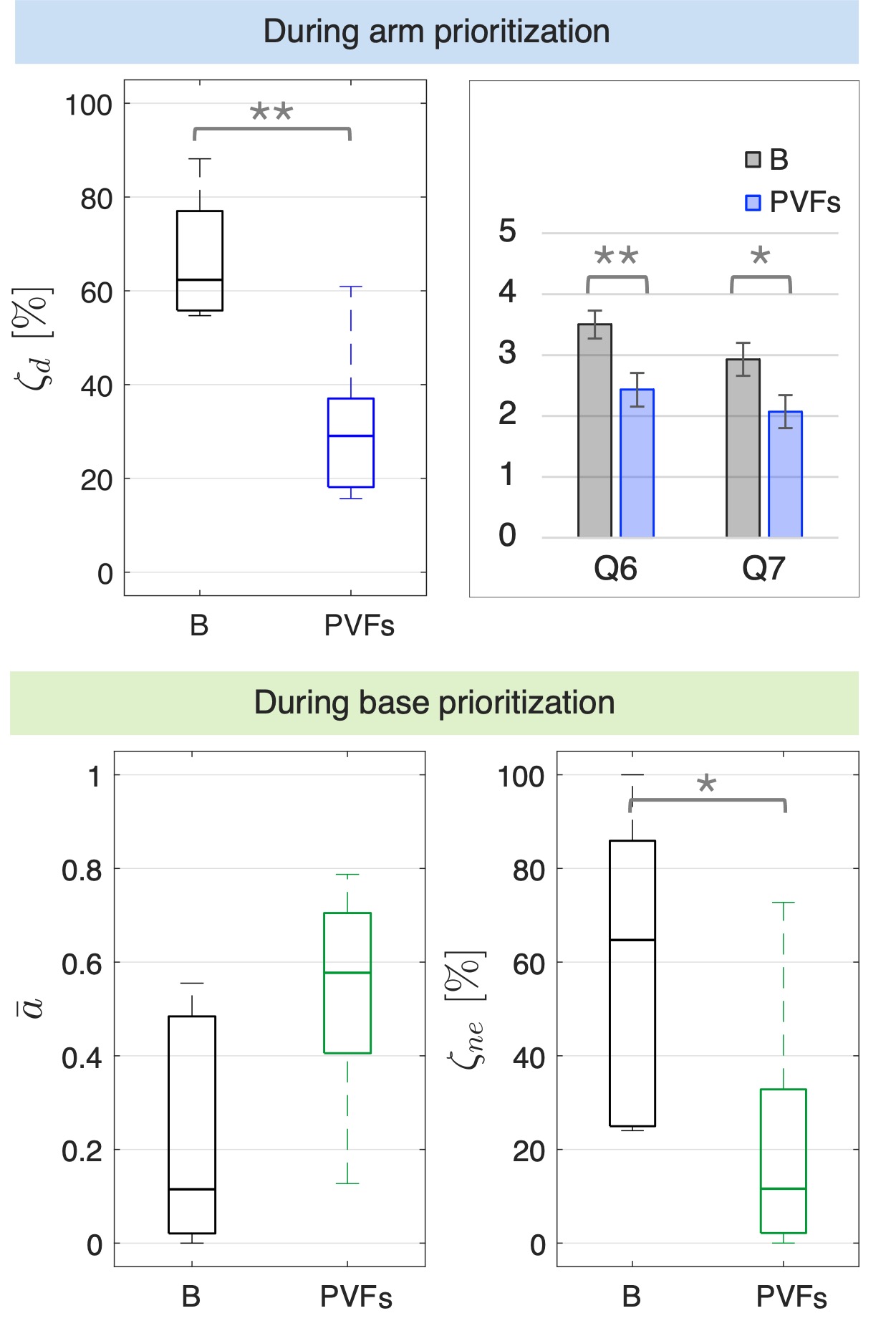
Исследование показало, что разработанная система управления значительно снижает нагрузку на оператора и улучшает эргономику рабочей позы при выполнении как длительных манипулятивных задач, так и задач перемещения на большие расстояния с манипуляциями. В частности, зафиксировано увеличение среднего эргономического фактора на 136% при приоритезации базовых настроек, при условии сохранения эргономичной позы во время приоритезации работы рук. Это указывает на то, что система не только облегчает выполнение задач, но и способствует поддержанию здоровой рабочей среды, минимизируя риск возникновения профессиональных заболеваний, связанных с перенапряжением опорно-двигательного аппарата и длительным сохранением неудобных поз.
Исследование выявило выраженный эффект обучения у операторов, работающих с системой. Наблюдалось последовательное улучшение показателей производительности и снижение уровня физической нагрузки по мере освоения принципов управления и взаимодействия с разработанной платформой. Данная динамика свидетельствует о том, что система не только обеспечивает немедленную эргономическую поддержку, но и способствует формированию более эффективных навыков работы, позволяя операторам адаптироваться и оптимизировать свои движения с течением времени. Это особенно важно для длительных и монотонных задач, где снижение утомляемости и повышение эффективности играют ключевую роль в поддержании высокой производительности и безопасности.
Статистический анализ данных, полученных в ходе исследования, продемонстрировал существенное улучшение эргономических показателей, подтвержденное значениями p-value менее 0.01. Это указывает на высокую статистическую значимость наблюдаемых эффектов. Особенно примечательно, что участники, начавшие тестирование с использованием Постуральных Виртуальных Фиксаторов (PVF), демонстрировали улучшенную эргономику даже при выполнении задач в базовых условиях, без использования PVF. Данный факт свидетельствует о заметном сокращении времени, затрачиваемого на поддержание неэргономичных поз, и указывает на то, что предварительное знакомство с системой PVF способствует формированию более здоровых и эффективных двигательных паттернов, оказывая долгосрочное положительное влияние на рабочую позу операторов.
Исследование, представленное в данной работе, демонстрирует, что грамотное использование виртуальных фикстур и кинестетической обратной связи способно значительно улучшить эргономику взаимодействия человека с дополнительными роботизированными телами. Этот подход позволяет не просто контролировать движения, но и формировать естественные, удобные позы, минимизируя усталость и риск перенапряжения. Барбара Лисков однажды заметила: «Программы должны быть спроектированы так, чтобы их можно было изменить без нарушения работы». Аналогично, данная система позволяет адаптировать управление роботизированными телами к индивидуальным особенностям пользователя и характеру выполняемой задачи, обеспечивая долгосрочный комфорт и эффективность при локо-манипуляциях и точных манипуляциях.
Куда Ведет Дорога?
Исследование, посвященное виртуальным фиксаторам для эргономичного взаимодействия с дополнительными роботизированными телами, обнажает, как и всегда, не столько решения, сколько новые грани сложности. Версионирование систем управления, в данном случае — оптимизация поз и минимизация нагрузки — это форма памяти, попытка сохранить работоспособность в условиях неизбежной деградации. Однако, стремление к идеальной эргономике — иллюзия. Тело, как и любая сложная система, адаптируется, но эта адаптация не всегда предсказуема и не всегда благоприятна.
Стрела времени всегда указывает на необходимость рефакторинга. Текущие решения, безусловно, улучшают комфорт и снижают нагрузку, но не учитывают долгосрочные последствия адаптации пользователя к роботизированной помощи. Какова цена «облегчения»? Не приведет ли постоянная поддержка к ослаблению собственных мышечных групп и снижению естественной ловкости? Будущие исследования должны быть направлены на изучение этих компенсаторных механизмов и разработку систем, которые не просто облегчают работу, но и поддерживают естественные возможности человека.
Перспективы очевидны: интеграция биометрических данных, адаптивное обучение моделей поведения пользователя, и, возможно, даже прогнозирование усталости на основе анализа микро-движений. Но главное — признать, что любая система, даже самая совершенная, стареет. Вопрос лишь в том, насколько достойно она это делает, и насколько органично вписывается в течение времени.
Оригинал статьи: https://arxiv.org/pdf/2601.22672.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Как сбросить приложение безопасности Windows, чтобы устранить проблемы в Windows 11 и 10
- Нефть вниз, инфляция под контролем: что ждет российский рынок в апреле? (14.03.2026 04:32)
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- vivo S50 Pro mini ОБЗОР: объёмный накопитель, портретная/зум камера, большой аккумулятор
- Лучшие ноутбуки с глянцевым экраном. Что купить в марте 2026.
- Motorola Moto G67 Power ОБЗОР: яркий экран, плавный интерфейс, удобный сенсор отпечатков
- vivo iQOO Z10x ОБЗОР: яркий экран, удобный сенсор отпечатков, объёмный накопитель
- Неважно, на что вы фотографируете!
- HP Omen 16-ap0091ng ОБЗОР
- Удобство мобильных приложений: систематизация проблем
2026-02-02 12:38