Автор: Денис Аветисян
Новая архитектура Dyn-HSI позволяет виртуальным героям реалистично реагировать на динамичные сцены, адаптируя свои движения к происходящим изменениям.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"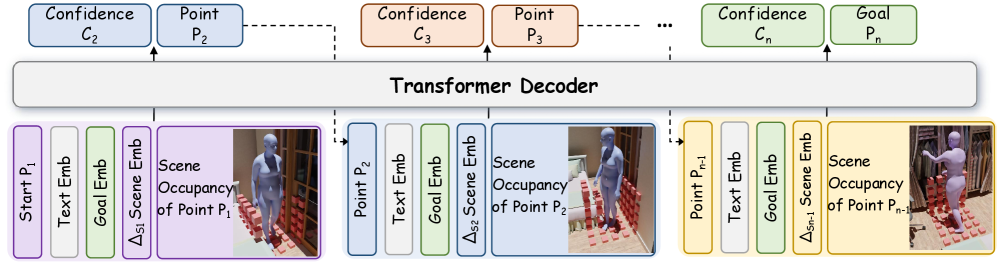
Представлена когнитивная архитектура, использующая диффузионные модели и модель мира для генерации реалистичных взаимодействий виртуальных людей с динамическими сценами.
В существующих моделях взаимодействия человека и окружающей среды часто упускается из виду динамичность реального мира, что снижает реалистичность симуляций. В статье ‘Dynamic Worlds, Dynamic Humans: Generating Virtual Human-Scene Interaction Motion in Dynamic Scenes’ представлена архитектура Dyn-HSI, использующая диффузионные модели и концепцию «мировой модели» для создания реалистичных взаимодействий виртуальных агентов с меняющимися условиями. Предложенный подход позволяет виртуальным персонажам воспринимать изменения в окружающей среде и адаптировать свои движения, обеспечивая более правдоподобное поведение. Сможет ли Dyn-HSI стать основой для создания действительно интеллектуальных и адаптивных виртуальных миров?
Реалистичное взаимодействие: вызов для виртуальных людей
Для создания действительно убедительных виртуальных людей недостаточно просто качественной анимации; необходима отзывчивая интеракция человека и окружающей среды (HSI). Реалистичное поведение требует, чтобы виртуальный персонаж не просто выполнял заранее запрограммированные движения, но и адекватно реагировал на изменения в динамичной среде. Это включает в себя взаимодействие с объектами, адаптацию к различным поверхностям и физическим свойствам, а также способность избегать препятствий и ориентироваться в пространстве. Именно такая отзывчивость, учитывающая контекст и физические законы, отличает правдоподобную симуляцию от простого воспроизведения заранее заданных движений, что является ключевым фактором для достижения полного погружения и ощущения присутствия.
Существующие методы генерации движений виртуальных персонажей сталкиваются с серьезными трудностями в динамичных и сложных сценах. Часто, при взаимодействии с изменяющейся средой, создаваемые анимации выглядят неестественно и неубедительно. Это связано с тем, что большинство алгоритмов не учитывают в полной мере физические ограничения, столкновения с объектами и необходимость адаптации к непредсказуемым изменениям окружения. В результате, виртуальный персонаж может демонстрировать движения, не соответствующие законам физики или логике поведения, что негативно сказывается на реалистичности и погружении пользователя. Разработка более совершенных алгоритмов, способных учитывать все эти факторы, является ключевой задачей в области создания правдоподобных виртуальных людей.
Dyn-HSI: когнитивная архитектура для динамичных агентов
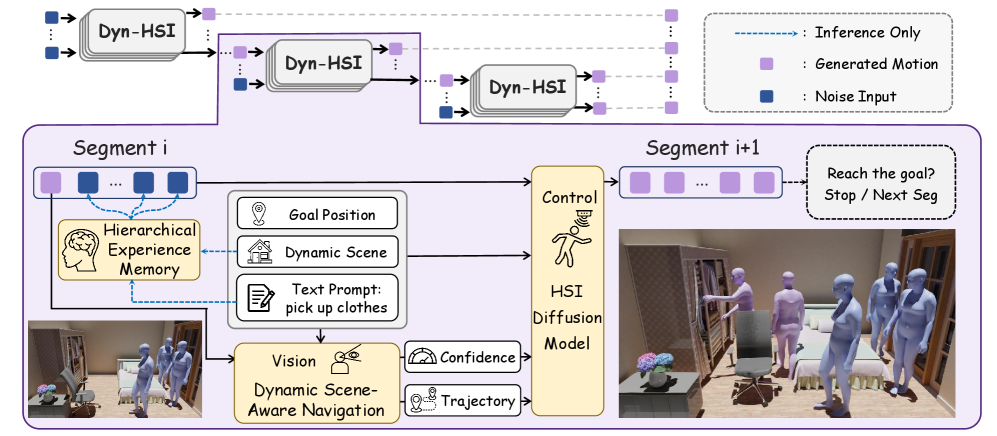
Архитектура Dyn-HSI включает в себя динамическую навигацию с учетом окружения, позволяющую виртуальному агенту воспринимать и реагировать на изменения в окружающей среде. Это достигается за счет непрерывного анализа сенсорных данных, поступающих от системы восприятия, и обновления внутренней карты мира. Система способна идентифицировать новые объекты, изменения в расположении существующих объектов и динамические препятствия. На основе этой информации агент корректирует свой маршрут и поведение в реальном времени, обеспечивая адаптацию к изменяющимся условиям и избежание столкновений. Реализация включает алгоритмы одновременной локализации и построения карты (SLAM) и планирования траектории, оптимизированные для работы в динамических средах.
Иерархическая память опыта является ключевым компонентом архитектуры Dyn-HSI и функционирует на основе технологии извлечения с последующей генерацией (Retrieval-Augmented Generation, RAG). Данный подход позволяет агенту извлекать релевантные эпизоды из накопленных данных о прошлом опыте, сопоставляя их с текущей ситуацией. Извлеченные данные затем используются в качестве контекста для генерации адаптивных реакций и стратегий поведения, что обеспечивает эффективное применение накопленных знаний в динамически меняющейся среде. Иерархическая структура памяти обеспечивает организацию опыта на различных уровнях абстракции, оптимизируя процесс поиска и извлечения наиболее подходящих данных для решения конкретной задачи.
Система использует новую диффузионную модель HSI для генерации реалистичных движений. Эта модель функционирует на основе комплексной Мировой Модели, которая предоставляет информацию об окружении и взаимодействии агента с ним. Диффузионный процесс позволяет генерировать разнообразные и правдоподобные движения, учитывая контекст сцены и текущие цели агента. В основе модели лежит вероятностный подход, который преобразует случайный шум в когерентные и физически правдоподобные траектории движения, обеспечивая естественность и реализм поведения виртуального агента.
Генерация убедительных движений с диффузионными моделями
Модель HSI Diffusion генерирует движения посредством обратного процесса диффузии, начиная с случайного шума и постепенно уточняя его до реалистичной последовательности кадров. Этот процесс основан на постепенном удалении гауссовского шума из данных, что позволяет модели изучать распределение вероятностей реалистичных движений. В результате модель способна создавать разнообразные и правдоподобные движения, поскольку она не ограничена заранее заданными анимациями или траекториями, а обучается непосредственно на данных о движении, генерируя новые, ранее не виданные варианты. Использование диффузионных моделей позволяет достичь высокого уровня детализации и реализма в сгенерированных движениях, что особенно важно для создания убедительных анимаций виртуальных персонажей.
Внутри модели используется условный адаптер, который динамически взвешивает различные входные условия. Этот адаптер позволяет системе адаптироваться к конкретным задачам и окружению, определяя значимость каждого входного сигнала — например, целей движения, ограничений окружения и истории предыдущих действий виртуального персонажа. Веса, присваиваемые этим условиям, рассчитываются автоматически в процессе обучения, что позволяет модели гибко реагировать на изменяющиеся обстоятельства и генерировать реалистичные движения, соответствующие текущему контексту. Функциональность адаптера основана на нейронных сетях, обеспечивающих нелинейное преобразование входных данных и оптимизацию весов для достижения наилучшей производительности.
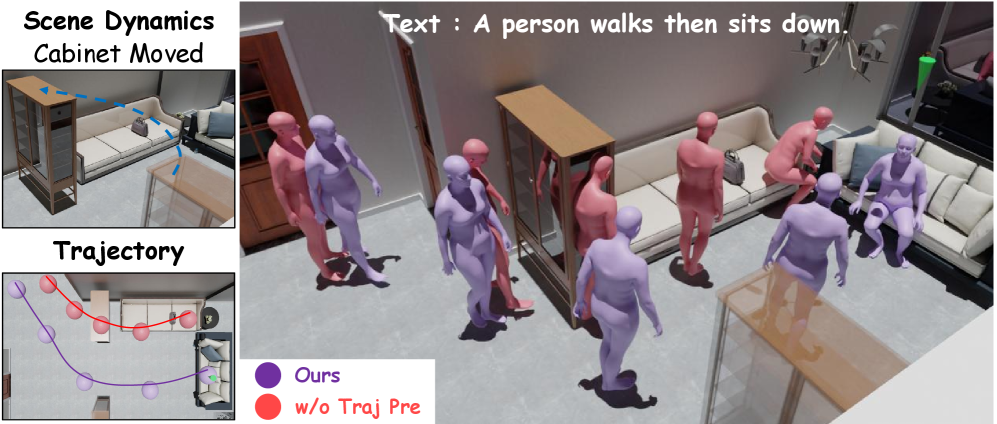
Данный подход использует возможности диффузионных моделей, направляя процесс генерации движений виртуального персонажа информацией об окружающей среде и его предыдущей истории. Это позволяет создавать последовательности движений, которые не только реалистичны, но и контекстуально согласованы с виртуальным миром и логичны в рамках повествования. Информация об окружении, включая препятствия и другие объекты, используется для предотвращения нереалистичных столкновений и обеспечения правдоподобного взаимодействия. Учет предыдущей истории движений персонажа обеспечивает плавность и последовательность, избегая резких и неестественных переходов между различными действиями.
Бесшовная навигация и предотвращение столкновений
В основе модуля динамической навигации Dyn-HSI лежат передовые методы планирования траектории, включающие оптимизацию траектории и алгоритм A. Оптимизация траектории позволяет системе вычислять наиболее эффективные пути, учитывая различные ограничения и цели, в то время как алгоритм A обеспечивает быстрое и надежное нахождение кратчайшего пути в динамически изменяющейся среде. Комбинация этих подходов позволяет Dyn-HSI не только планировать оптимальные маршруты, но и оперативно адаптироваться к неожиданным препятствиям и изменениям в окружающей обстановке, обеспечивая плавное и безопасное перемещение.
Для обеспечения надежного обнаружения столкновений и их предотвращения в реальном времени, система использует воксельное представление сцены. Этот подход разбивает окружающее пространство на трехмерную сетку из кубических элементов — вокселей, позволяя быстро определить, какие воксели заняты объектами, а какие свободны. Благодаря этому, система способна оперативно выявлять потенциальные столкновения и корректировать траекторию движения, избегая неестественного проникновения объектов друг в друга — так называемых “артефактов проникновения”. Воксельное представление не только обеспечивает высокую скорость обработки данных, но и позволяет эффективно учитывать сложную геометрию окружающей среды, гарантируя плавное и реалистичное движение в динамичной обстановке.
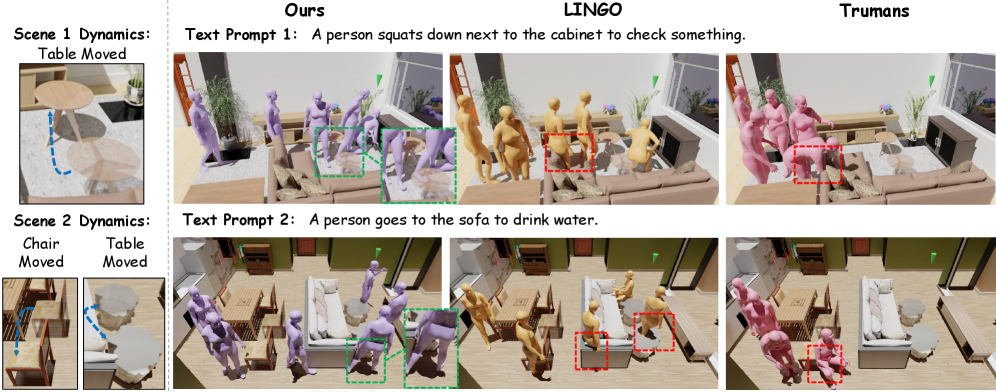
Разработанный подход демонстрирует значительное улучшение в предотвращении столкновений, обеспечивая снижение максимального проникновения на 50.24% по сравнению с передовыми методами, такими как LINGO. Это существенное уменьшение свидетельствует о повышенной безопасности и реалистичности навигации в динамичных средах. Уменьшение проникновения позволяет избежать визуальных артефактов и обеспечивает более плавное и правдоподобное взаимодействие агента с окружением, что особенно важно в задачах, требующих высокой точности и надежности, например, в робототехнике и виртуальной реальности.
Исследования показали, что система демонстрирует высокую способность к обобщению, что подтверждается незначительным увеличением максимального проникновения — всего на 5.74% — при тестировании на данных, отличных от тех, на которых она обучалась. Этот результат указывает на устойчивость системы к новым, ранее не встречавшимся ситуациям и её способность эффективно функционировать даже в условиях неполной или меняющейся информации об окружающей среде. Такая способность к адаптации является критически важной для практического применения в реальных сценариях, где предсказать все возможные варианты развития событий невозможно.
Исследования показали значительное повышение точности навигации при использовании разработанной системы. В частности, зафиксировано снижение ошибки достижения цели на 96.36% по сравнению с существующим алгоритмом LINGO. Этот результат свидетельствует о способности системы Dyn-HSI не только эффективно обходить препятствия, но и уверенно достигать заданных точек маршрута, обеспечивая более надежную и предсказуемую траекторию движения. Повышенная точность особенно важна в сложных динамических окружениях, где даже незначительные отклонения могут привести к нежелательным последствиям или необходимости повторной корректировки курса.

К интеллектуальным и адаптивным виртуальным агентам
Система Dyn-HSI знаменует собой существенный прогресс в создании интеллектуальных и адаптивных виртуальных людей благодаря интеграции динамического восприятия окружающей среды, иерархической памяти и мощной диффузионной модели. В отличие от предыдущих подходов, которые часто полагаются на заранее заданные анимации или ограниченное понимание контекста, Dyn-HSI способна воспринимать и реагировать на изменения в сцене в реальном времени, сохраняя при этом долгосрочную информацию о взаимодействиях и событиях. Это достигается за счет комбинирования способности к пониманию визуальной информации с иерархической структурой памяти, позволяющей агенту эффективно организовывать и извлекать релевантные данные. Мощная диффузионная модель, в свою очередь, обеспечивает генерацию реалистичных и правдоподобных движений, соответствующих контексту и намерениям агента, что значительно повышает уровень погружения и реалистичности взаимодействия.
Дальнейшие исследования направлены на усовершенствование генерации движений на основе текстовых запросов. Это позволит виртуальным агентам понимать и реагировать на естественный язык, создавая более тонкие и реалистичные взаимодействия с пользователем. Разработчики стремятся к тому, чтобы система могла интерпретировать сложные инструкции и преобразовывать их в плавные и осмысленные движения, что открывает возможности для создания действительно интерактивных и убедительных виртуальных персонажей. Улучшение данной способности позволит виртуальным агентам не просто выполнять заданные действия, но и адаптироваться к контексту разговора и выражать эмоции через движения, приближая их поведение к человеческому.
Архитектура, лежащая в основе разработки виртуальных агентов, обладает потенциалом для кардинальных изменений в таких областях, как робототехника, игровая индустрия и виртуальная реальность. Она позволяет создавать не просто запрограммированные последовательности действий, а действительно правдоподобные и адаптивные виртуальные сущности. В робототехнике это может привести к разработке более интуитивно понятных и эффективных помощников, способных взаимодействовать с окружающей средой и людьми на качественно новом уровне. В игровом мире подобные агенты откроют возможности для создания беспрецедентно реалистичных персонажей, способных к сложным взаимодействиям и непредсказуемому поведению. А в сфере виртуальной реальности данная технология позволит пользователям погрузиться в полностью убедительные цифровые миры, населенные виртуальными существами, неотличимыми от реальных, что значительно усилит эффект присутствия и вовлеченности.
Исследование, представленное в данной работе, демонстрирует элегантность подхода к моделированию взаимодействия человека и динамичной среды. Авторы предлагают архитектуру Dyn-HSI, способную воспринимать изменения в окружении и адаптировать движения виртуальных агентов соответствующим образом. Этот подход, основанный на диффузионных моделях и модели мира, позволяет создавать реалистичные и правдоподобные взаимодействия. Как однажды заметил Джеффри Хинтон: «Я думаю, что мы находимся на грани создания машин, которые могут учиться». Эта фраза особенно актуальна в контексте Dyn-HSI, поскольку система демонстрирует способность к обучению и адаптации к новым, динамически меняющимся условиям. Подобная способность к обучению и адаптации — признак глубокого понимания принципов взаимодействия и гармонии между виртуальным агентом и окружающей средой.
Куда же дальше?
Представленная работа, безусловно, является шагом вперед в создании виртуальных миров, населенных существами, способными не просто существовать, но и взаимодействовать с окружающей средой. Однако, стоит признать, что реалистичное поведение — это не просто генерация правдоподобных движений. Это — понимание контекста, предвидение последствий, и, что самое сложное, адаптация к неожиданностям. Текущие модели, даже самые элегантные, все еще склонны к «танцу с тени», реагируя на изменения, а не предвосхищая их.
Будущие исследования, вероятно, будут сосредоточены на интеграции более глубокого семантического понимания сцены. Недостаточно просто «видеть» препятствие; необходимо «понимать» его назначение и потенциальное влияние на действия агента. Также, представляется важным развитие моделей, способных к обучению с подкреплением в сложных, динамических средах. Ведь, в конечном счете, красота в коде проявляется через простоту и ясность, а истинное взаимодействие — через способность к самообучению и адаптации.
Следующим логичным шагом видится разработка архитектур, способных к «внутреннему моделированию» — созданию когнитивной карты мира, позволяющей агенту планировать действия на несколько шагов вперед. Каждый элемент интерфейса — часть симфонии, и гармоничное взаимодействие виртуальных агентов с миром требует не только точной симуляции физики, но и глубокого понимания принципов когнитивной архитектуры.
Оригинал статьи: https://arxiv.org/pdf/2601.19484.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Acer Aspire 5 Spin 14 ОБЗОР
- Tecno Pova 7 ОБЗОР: беспроводная зарядка, плавный интерфейс, большой аккумулятор
- Интервью с создателями фильма «Пятая группа крови»
- Новые смартфоны. Что купить в мае 2026.
- Как установить SteamOS на игровые портативные устройства ROG Ally и Legion Go под управлением Windows
- Как обновить Windows 10 до 11, используя локальную учётную запись — пошаговое руководство по обходу требования к учётной записи Microsoft.
- Motorola Edge 70 Ultra ОБЗОР: современный дизайн, скоростная зарядка, огромный накопитель
- Motorola Moto G77 ОБЗОР: яркий экран, лёгкий, чёткое изображение
- 10 лучших OLED ноутбуков. Что купить в мае 2026.
- Финальное обновление Minecraft года официально здесь — Mounts of Mayhem добавляет сражения верхом в Overworld.
2026-01-28 11:26