Автор: Денис Аветисян
Исследователи предлагают инновационную систему, позволяющую роботам надежно взаимодействовать с деформируемыми объектами, используя логические цепочки и пространственное уточнение.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
Представлен TRACER — фреймворк для надежного определения аффордансов деформируемых объектов, использующий логическое рассуждение и пространственное уточнение для достижения динамической конвергенции.
Несмотря на значительный прогресс в робототехнике, надежное манипулирование деформируемыми объектами остается сложной задачей из-за их бесконечных степеней свободы и сложной динамики. В данной работе представлен ‘TRACER: Texture-Robust Affordance Chain-of-Thought for Deformable-Object Refinement’ — новый подход, использующий цепочку рассуждений и пространственное уточнение для повышения точности определения функциональных областей на деформируемых объектах. Предложенная архитектура TRACER позволяет преодолеть ограничения существующих методов, обеспечивая более устойчивое к текстурным изменениям и физически правдоподобное выделение областей взаимодействия. Способно ли данное решение существенно расширить возможности роботов в задачах, требующих манипулирования сложными и гибкими объектами в реальных условиях?
Трудности манипулирования деформируемыми объектами
Традиционные методы роботизированной манипуляции сталкиваются с серьезными трудностями при работе с деформируемыми объектами, такими как ткани, кабели или растительность. Основная проблема заключается в практически бесконечном количестве возможных конфигураций, которые может принимать такой объект. В отличие от жестких тел с фиксированной формой и ограниченным числом степеней свободы, деформируемый объект может изгибаться, скручиваться и растягиваться бесчисленными способами, что делает предсказание его поведения и планирование эффективных действий чрезвычайно сложной задачей. Это создает значительные препятствия для автоматизации задач, связанных с захватом, перемещением и сборкой подобных объектов, требуя разработки принципиально новых подходов к управлению и восприятию.
Существующие методы манипулирования деформируемыми объектами часто сталкиваются с трудностями при планировании действий на длительный период времени. Это связано с тем, что прогнозирование стабильных конфигураций и учет всех возможных взаимодействий объекта с окружающей средой требуют значительных вычислительных ресурсов и сложных алгоритмов. Роботы, как правило, оптимизируют только ближайшие шаги, не учитывая, как текущие действия повлияют на состояние объекта через несколько секунд или минут. В результате, попытки манипулирования могут приводить к нестабильности, деформации или даже падению объекта, особенно в сложных и динамичных сценариях. Для решения этой проблемы необходимы новые подходы, способные моделировать долгосрочные последствия действий и предсказывать наиболее устойчивые конфигурации деформируемых объектов.
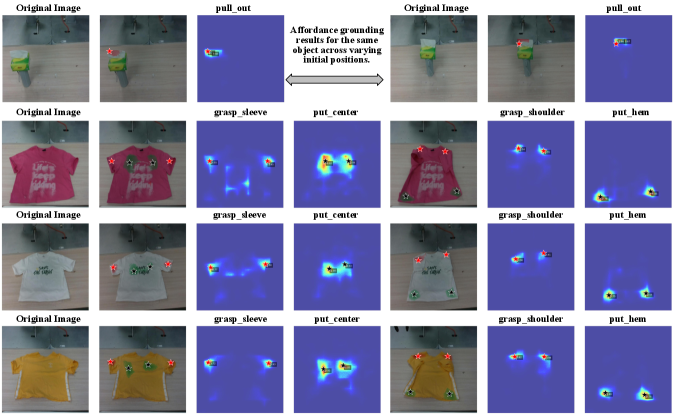
Точное восприятие и определение возможностей манипуляции (affordance grounding) являются ключевыми для успешного взаимодействия роботов с деформируемыми объектами, однако существующие подходы часто оказываются неэффективными в сложных, текстурированных сценариях. Проблема заключается в том, что алгоритмы компьютерного зрения испытывают трудности с распознаванием формы и свойств объекта, особенно когда поверхность неровная или имеет сложный узор. Это приводит к неточным оценкам сил, необходимых для захвата и перемещения объекта, и, как следствие, к неудачам манипуляции. Более того, сложность визуальной информации затрудняет определение того, какие действия робот может безопасно и эффективно выполнить с данным объектом, ограничивая его способность адаптироваться к различным ситуациям и успешно решать поставленные задачи. Необходимы новые методы, сочетающие в себе передовые алгоритмы обработки изображений и глубокое понимание физических свойств деформируемых материалов, чтобы преодолеть эти ограничения и обеспечить надежное взаимодействие роботов с окружающим миром.
![Сравнение подходов к манипулированию деформируемыми объектами показывает, что использование модульной архитектуры с объяснением [CoT] (зеленый цвет) позволяет избежать типичных ошибок восприятия (серый цвет) и обеспечивает физически корректное управление, в отличие от подхода](https://arxiv.org/html/2601.20208v1/x1.png)
TRACER: Иерархический механизм рассуждений
Система TRACER решает задачи манипулирования на больших временных горизонтах, используя иерархический механизм рассуждений TA-CoT (Task-Aware Chain-of-Thought). TA-CoT предполагает декомпозицию сложных задач на последовательность более простых и управляемых под-действий. Это позволяет системе планировать и выполнять манипуляции, разбивая их на отдельные шаги, каждый из которых может быть выполнен с большей точностью и надежностью. Иерархическая структура позволяет эффективно исследовать пространство возможных действий, избегая экспоненциального роста сложности, характерного для задач с длинным горизонтом планирования. Декомпозиция также способствует повышению интерпретируемости процесса принятия решений системой.
В основе работы TRACER лежит принцип последовательного рассуждения (Chain-of-Thought Reasoning), позволяющий системе планировать и выполнять сложные манипуляции, разбивая их на последовательные этапы. Этот подход предполагает не просто непосредственное определение действия, а построение логической цепочки рассуждений, где каждое последующее действие зависит от результатов предыдущего. Система анализирует текущее состояние, прогнозирует последствия каждого возможного действия и выбирает наиболее оптимальный путь для достижения цели, рассматривая задачу как последовательность взаимосвязанных шагов. Такой метод позволяет TRACER справляться с задачами, требующими долгосрочного планирования и адаптации к изменяющимся условиям.
Ключевым компонентом TRACER является функция потерь SCBR (Spatially Consistent Belief Representation), обеспечивающая предсказания доступных действий (affordances), физически правдоподобных и пространственно согласованных. SCBR Loss минимизирует расхождения между предсказанными affordances и реальными физическими ограничениями окружения, а также обеспечивает согласованность предсказаний в пространстве. Это достигается путем учета взаимного влияния объектов и их геометрических характеристик при формировании представления о доступных действиях, что повышает надежность планирования и манипуляций в сложных сценариях.

Уточнение восприятия и определение возможностей взаимодействия с ICRF
Интерактивный процесс уточнения сходимости (ICRF) объединяет разрозненные ответы, определяющие возможности взаимодействия (affordance responses), формируя непрерывную и физически согласованную область для манипуляций. Вместо обработки дискретных предсказаний, ICRF агрегирует их, создавая единое, плавное представление, которое учитывает физические ограничения и обеспечивает более надежное определение областей, доступных для захвата и перемещения. Этот подход позволяет избежать фрагментации и неточностей, возникающих при анализе отдельных предсказаний, и обеспечивает более стабильное и интуитивно понятное взаимодействие с объектами.
Интерактивный процесс уточнения сходимости (ICRF) использует метод Flow Matching для повышения стабильности предсказаний и обеспечения плавных переходов между ними. Flow Matching позволяет моделировать динамику предсказаний как непрерывный процесс, что снижает вероятность резких изменений и обеспечивает более устойчивые результаты. Этот подход особенно важен для задач, связанных с манипуляциями, где прерывистые или неточные предсказания аффордансов могут привести к ошибкам. По сути, Flow Matching преобразует задачу предсказания аффордансов в задачу отслеживания непрерывного потока, что позволяет более эффективно использовать данные и повышать надежность системы.
В основе процесса усовершенствования восприятия и определения доступных действий лежит высококачественный набор данных Fine-AGDDO15, подвергшийся улучшению за счет более точных аннотаций. Для обеспечения точной сегментации объектов и создания мягких масок (soft masks) используется модель SAM (Segment Anything Model). Улучшенные аннотации и применение SAM позволяют получать более детализированные и реалистичные представления объектов, что критически важно для корректного определения возможных манипуляций и обеспечения физической согласованности в процессе взаимодействия.

Результаты эмпирической проверки и прирост производительности
Исследование продемонстрировало работоспособность TRACER в условиях реального мира посредством тестирования на двуруком роботе. Система успешно справилась с манипулированием сложными деформируемыми объектами, что подтверждает ее потенциал для практического применения. Роботизированная платформа позволила оценить способность TRACER адаптироваться к непредсказуемым характеристикам мягких материалов и выполнять задачи, требующие высокой точности и координации движений обеих рук. Данные эксперименты показали, что TRACER способна эффективно решать сложные манипуляционные задачи, что открывает возможности для автоматизации процессов в медицине, текстильной промышленности и других областях, где работа с деформируемыми объектами является критически важной.
Исследования показали значительное превосходство разработанной системы в задачах манипулирования деформируемыми объектами по сравнению с существующими методами, такими как OS-AGDO. В ходе экспериментов зафиксирован 70%-ный показатель успешности при выполнении задачи по извлечению ткани, что свидетельствует о высокой точности и надежности системы. Не менее впечатляющим является результат в 60% при организации одежды, демонстрирующий способность системы к эффективному и аккуратному выполнению сложных операций. Эти количественные показатели подтверждают, что новая система способна существенно повысить эффективность и автоматизацию процессов, требующих работы с деформируемыми материалами.
В ходе сравнительного анализа производительности, система TRACER продемонстрировала заметные улучшения ключевых метрик по сравнению с базовым методом OS-AGDO. В частности, зафиксировано повышение показателя KLD (Kullback-Leibler divergence) на 4.8%, что свидетельствует о более эффективном сближении распределений вероятностей и, как следствие, о более точной работе алгоритма. Кроме того, улучшение SIM (Structural Image Metric) составило 7.5%, подтверждая более высокую структурную схожесть результатов, получаемых TRACER, с целевыми значениями. Наконец, показатель NSS (Normalized Scan Statistic), увеличившийся на 4.3%, указывает на более эффективное обнаружение и отслеживание ключевых особенностей в процессе манипулирования объектами. Эти количественные данные подтверждают превосходство TRACER в решении задач, требующих высокой точности и надежности.

На пути к более интеллектуальным и адаптивным роботам
Предстоящие исследования направлены на интеграцию разработанной системы TRACER с моделями Vision-Language-Action (VLA), что позволит создать роботов, способных к более интуитивному взаимодействию с человеком. Сочетание способности TRACER к точному манипулированию деформируемыми объектами с возможностями VLA по пониманию естественного языка и визуальных команд откроет путь к созданию роботов, способных выполнять сложные задачи по устным инструкциям или демонстрируемым примерам. Такой подход позволит отказаться от сложных программирований и специализированных интерфейсов, сделав взаимодействие с роботами более простым и естественным для людей, что значительно расширит сферу их применения в повседневной жизни и профессиональной деятельности.
Для дальнейшего повышения надёжности и способности к обобщению разработанной системы, планируется значительное расширение набора данных. Это включает в себя не только увеличение количества разнообразных деформируемых объектов — от тканей различной плотности и эластичности до гибких кабелей и тонких плёнок — но и усложнение сценариев манипуляций. Исследователи стремятся создать условия, максимально приближенные к реальным, с учётом непредсказуемых помех, частичной видимости объектов и необходимости выполнять задачи в загромождённых пространствах. Такой подход позволит алгоритмам лучше адаптироваться к новым, ранее не встречавшимся ситуациям, и обеспечит стабильную работу робота в неструктурированных условиях, открывая перспективы для его применения в различных отраслях.
Данное исследование знаменует собой важный шаг к созданию роботов, способных автономно манипулировать деформируемыми объектами в неструктурированных средах. Возможность надежного обращения с такими предметами, как ткани, кабели или растения, открывает широкие перспективы в различных областях. В здравоохранении роботы смогут ассистировать в уходе за пациентами, например, при надевании компрессионного белья или обработке ран. В производстве — выполнять деликатные задачи сборки и упаковки, требующие гибкости и точности. А в сельском хозяйстве — аккуратно собирать фрукты и овощи, не повреждая их. Развитие подобных технологий позволит автоматизировать процессы, требующие адаптивности и умения работать с объектами, не имеющими жесткой формы, значительно повышая эффективность и безопасность труда.
Исследование, представленное в данной работе, демонстрирует, что эффективная манипуляция деформируемыми объектами требует не просто понимания их свойств, но и способности к последовательному рассуждению о возможных действиях. Подход TRACER, с его акцентом на цепочку рассуждений и пространственное уточнение, подтверждает идею о том, что структура определяет поведение системы. Как однажды заметил Анри Пуанкаре: «Математика — это искусство давать точные ответы на вопросы, которые никто никогда не задавал». Эта фраза отражает суть работы: создание системы, способной решать задачи, возникающие в контексте манипуляции деформируемыми объектами, путём логического анализа и уточнения действий, что позволяет достичь динамической сходимости и надежной работы.
Куда дальше?
Представленная работа, демонстрируя возможности TRACER в манипулировании деформируемыми объектами, неизбежно поднимает вопрос о границах применимости и скрытых издержках подобного подхода. Каждая новая зависимость от цепочки рассуждений — это, по сути, скрытая цена свободы от прямого, интуитивного взаимодействия с миром. И хотя TRACER успешно справляется с пространственным уточнением, остается неясным, насколько эффективно система будет масштабироваться для объектов со значительно большей степенью сложности и непредсказуемости деформации.
Настоящий вызов заключается не столько в увеличении вычислительной мощности, сколько в переосмыслении самой архитектуры восприятия. Необходимо двигаться от простого «определения» аффордансов к пониманию их динамической, контекстуально-зависимой природы. Элегантное решение, вероятно, кроется в интеграции принципов самоорганизации и адаптации, позволяющих системе «чувствовать» объект, а не просто анализировать его свойства.
В конечном итоге, успех в этой области будет определяться не количеством «умных» алгоритмов, а способностью создать систему, которая не просто выполняет поставленную задачу, но и способна к творческому решению проблем и предвидению последствий своих действий. Структура, определяющая поведение, должна быть не только эффективной, но и устойчивой к непредсказуемости реального мира.
Оригинал статьи: https://arxiv.org/pdf/2601.20208.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Acer Aspire 5 Spin 14 ОБЗОР
- Tecno Pova 7 ОБЗОР: беспроводная зарядка, плавный интерфейс, большой аккумулятор
- Интервью с создателями фильма «Пятая группа крови»
- Как установить SteamOS на игровые портативные устройства ROG Ally и Legion Go под управлением Windows
- Новые смартфоны. Что купить в мае 2026.
- Motorola Moto G77 ОБЗОР: яркий экран, лёгкий, чёткое изображение
- Финальное обновление Minecraft года официально здесь — Mounts of Mayhem добавляет сражения верхом в Overworld.
- 10 лучших OLED ноутбуков. Что купить в мае 2026.
- Как обновить Windows 10 до 11, используя локальную учётную запись — пошаговое руководство по обходу требования к учётной записи Microsoft.
- Motorola Edge 70 Ultra ОБЗОР: современный дизайн, скоростная зарядка, огромный накопитель
2026-01-30 00:26