Автор: Денис Аветисян
Новая методика позволяет роботам лучше воспринимать тактильные ощущения, приближая их к человеческому опыту и повышая точность манипуляций.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"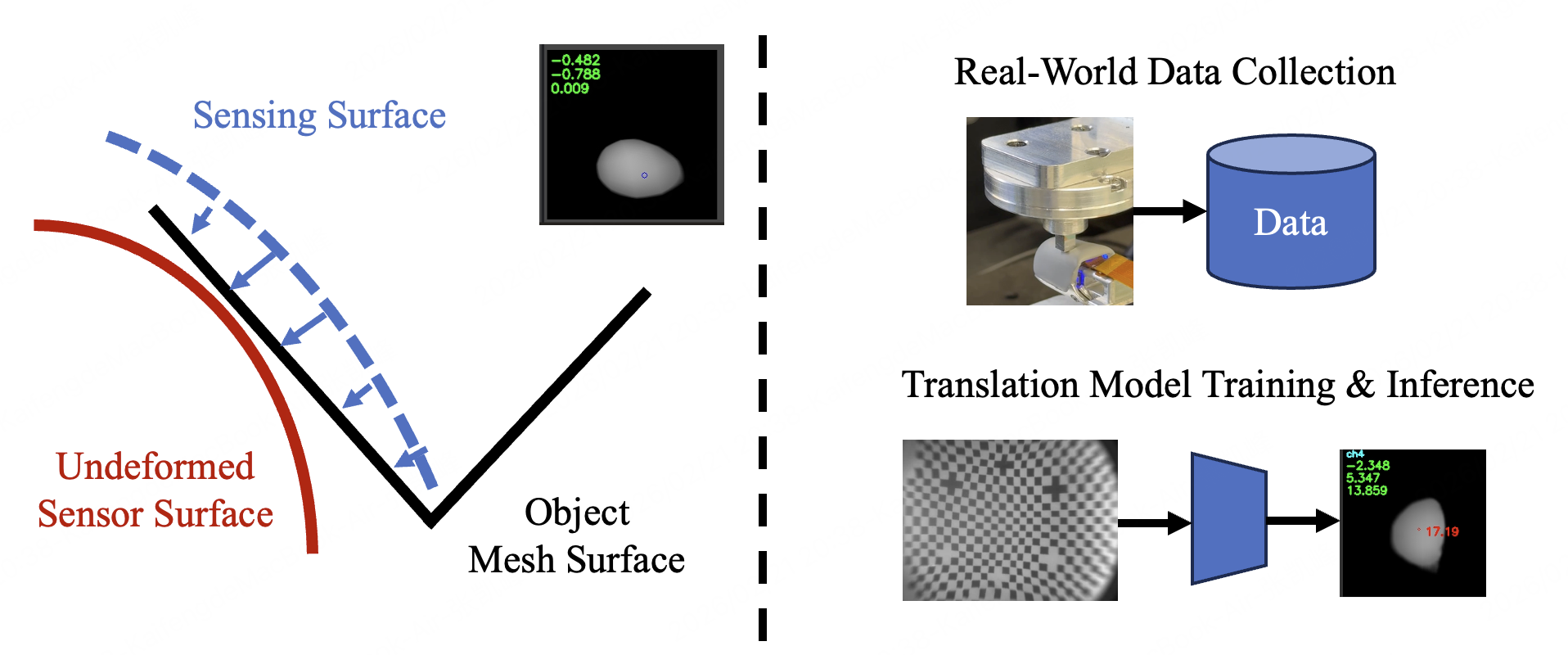
В статье представлена Tacmap — инновационная платформа тактильного моделирования, использующая геометрически согласованные карты глубины проникновения для эффективного переноса обучения из симуляции в реальный мир.
Несмотря на значительный прогресс в области робототехники, достижение надежной тактильной обратной связи остается сложной задачей из-за разрыва между симуляцией и реальным миром. В данной работе представлена система ‘Tacmap: Bridging the Tactile Sim-to-Real Gap via Geometry-Consistent Penetration Depth Map’, использующая унифицированное геометрическое представление — карты деформации — для преодоления этого разрыва. Ключевой инновацией является вычисление карт глубины проникновения в симуляции и обучение соответствия между изображениями тактильных сенсоров и картами глубины в реальном мире, что позволяет минимизировать расхождения между доменами. Сможет ли предложенный подход значительно улучшить возможности роботизированных систем в задачах, требующих высокой точности и адаптивности, таких как сборка и манипулирование объектами?
Преодолевая Разрыв Между Виртуальным и Реальным Осязанием
Традиционные тактильные сенсоры часто сталкиваются с трудностями при точном воссоздании сложности контакта с объектами, что существенно ограничивает ловкость и возможности манипулирования роботами. Вместо детального анализа формы, текстуры и силы давления, многие датчики предоставляют лишь упрощенную информацию, не отражающую нюансы реального взаимодействия. Это приводит к тому, что робот может испытывать трудности с захватом хрупких предметов, выполнением тонких операций или адаптацией к изменяющимся условиям. Неспособность адекватно интерпретировать тактильные данные снижает эффективность захвата, увеличивает риск повреждения объектов и препятствует созданию действительно гибких и универсальных роботизированных систем, способных выполнять задачи, требующие высокой степени чувствительности и координации.
Эффективное моделирование тактильной обратной связи имеет решающее значение для обеспечения надежной манипуляции роботами, однако существенные расхождения между симуляцией и реальными условиями значительно ограничивают производительность. Несмотря на значительный прогресс в алгоритмах и сенсорных технологиях, воссоздание точных ощущений при контакте в виртуальной среде остается сложной задачей. Эти неточности возникают из-за упрощений в моделях материалов, неполного учета динамических эффектов и трудностей в точной калибровке сенсоров. В результате, роботы, обученные в симуляции, часто демонстрируют снижение эффективности или даже сбои при работе с реальными объектами, что подчеркивает необходимость разработки более реалистичных и точных методов моделирования тактильной обратной связи для достижения действительно адаптивной и надежной роботизированной манипуляции.
Для создания по-настоящему адаптивных роботизированных рук ключевым фактором является точное улавливание нюансов контакта, в частности, деформации эластомеров. Исследования показывают, что традиционные датчики осязания часто упрощают сложность контакта, игнорируя тонкие изменения формы и распределения давления в деформируемых материалах. Учет этих деталей, например, посредством использования высокочувствительных датчиков деформации или продвинутых алгоритмов обработки данных, позволяет роботизированным рукам не только распознавать объекты, но и эффективно адаптироваться к их форме и текстуре. Такой подход позволяет значительно повысить надежность захвата, улучшить контроль над манипуляциями и приблизиться к уровню ловкости, присущему человеческим рукам, открывая новые возможности для применения роботов в сложных и деликатных задачах.
Tacmap: Унифицированное Геометрическое Пространство Осязания
Tacmap представляет собой новую систему моделирования, которая объединяет виртуальную симуляцию и реальный мир посредством унифицированного геометрического пространства деформаций. В основе подхода лежит представление объектов как эластомеров с точно определенной геометрией, что позволяет моделировать контактные взаимодействия с высокой степенью реалистичности. Ключевым аспектом является согласование геометрии симуляции и реальных объектов в едином пространстве деформаций, что обеспечивает более точную передачу тактильных ощущений и позволяет использовать данные, полученные в симуляции, для управления реальными роботами и наоборот. Это достигается путем математического описания деформаций объектов в симуляции таким образом, чтобы они соответствовали деформациям, наблюдаемым в реальном мире, обеспечивая, таким образом, согласованность между виртуальной и реальной средой.
В основе Tacmap лежит точное геометрическое моделирование, позволяющее детально описывать геометрию эластомеров. Это достигается путем использования параметрических представлений поверхностей и точных вычислений формы деформируемых объектов. Такой подход обеспечивает реалистичное представление контактов между объектами в симуляции, поскольку позволяет учитывать сложные деформации материала и их влияние на контактные силы. Точность моделирования геометрии критически важна для корректной работы алгоритмов расчета проникновения и генерации карт деформации, необходимых для обучения агентов в задачах с высоким уровнем реализма и сложности.
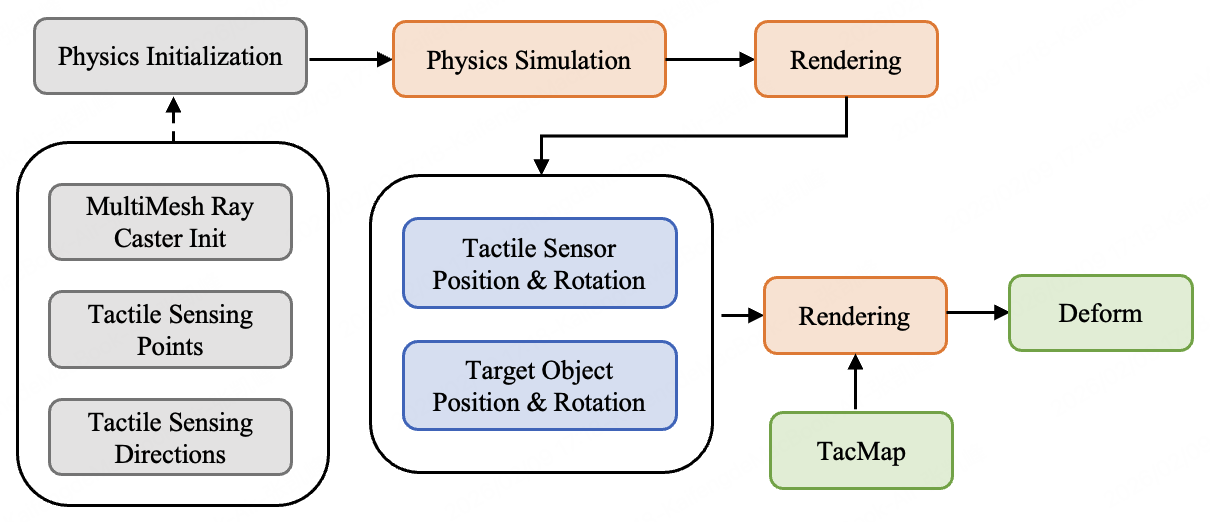
В Tacmap для генерации детальных карт деформации (Deform Maps) используется расчет глубины проникновения (Penetration Depth) с применением методов трассировки лучей (Ray Casting) и вычисления глубины, выровненной по нормали поверхности. Трассировка лучей позволяет определить точки контакта и расстояние проникновения объекта в эластомер. Вычисление глубины, выровненной по нормали, обеспечивает более точную оценку деформации, учитывая ориентацию поверхности в точке контакта. Комбинация этих методов позволяет создать детальное представление о деформации эластомера под воздействием внешних сил и формирует основу для симуляции тактильных ощущений.
Система Tacmap обеспечивает эффективное моделирование контакта, используя методы TacEx и Taccel. Эти методы позволяют поддерживать приемлемую частоту рендеринга даже при одновременном моделировании тысяч окружений. Это обеспечивает масштабируемость системы, что критически важно для обучения с подкреплением в больших масштабах. Высокая производительность достигается за счет оптимизации алгоритмов расчета контакта и эффективной обработки данных, что позволяет использовать Tacmap для решения задач, требующих симуляции большого количества параллельных взаимодействий.
Проверка на Многопальцевой Руке
Система Tacmap была интегрирована и протестирована на физической роботизированной платформе SharpaWave Dexterous Hand. Это позволило оценить работоспособность системы в реальных условиях, используя возможности многопальцевой руки для взаимодействия с объектами. Интеграция включала в себя подключение тактильных сенсоров SharpaWave Dexterous Hand к программному обеспечению Tacmap для сбора и обработки данных о контакте. Полученные данные использовались для оценки точности и надежности системы тактильного восприятия в процессе манипулирования объектами.
Оценка эффективности разработанной системы проводилась посредством выполнения задач вращения объекта в руке (In-Hand Rotation). Данные задачи требуют от робота высокой точности и контроля, обеспечиваемых за счет использования прецизионной тактильной обратной связи. Успешное выполнение вращения объекта без выскальзывания подтверждает способность системы обрабатывать и интерпретировать тактильные данные для обеспечения надежного захвата и манипулирования предметами, а также корректировать траекторию движения в реальном времени на основе полученной тактильной информации.
Для обучения политик управления манипулятором использовался алгоритм обучения с подкреплением — Proximal Policy Optimization (PPO). PPO позволил оптимизировать поведение робота в процессе взаимодействия со средой, что привело к улучшению его возможностей в задачах манипулирования. В ходе обучения алгоритм итеративно корректировал параметры политики, стремясь максимизировать вознаграждение, связанное с успешным выполнением манипулятивных действий. В результате применения PPO наблюдалось повышение точности и надежности выполнения сложных задач, требующих координации движений и тактильной обратной связи.
Интеграция с симуляционными средами, такими как Isaac Lab и MuJoCo, позволила ускорить прототипирование и тестирование алгоритмов управления. В ходе экспериментов была успешно продемонстрирована возможность переноса обученной политики вращения объекта в руке (in-hand rotation) непосредственно на физическую роботизированную платформу без дополнительной настройки или обучения в реальной среде, что подтверждает эффективность подхода к обучению с нулевым переносом (zero-shot transfer). Использование симуляций позволило сократить время разработки и снизить риски, связанные с тестированием алгоритмов непосредственно на физическом оборудовании.

К Надежным и Адаптивным Роботам
Способность Tacmap преодолевать разрыв между симуляцией и реальностью открывает новые возможности для создания более надежных стратегий манипулирования роботами. Традиционно, обучение роботов в виртуальной среде сталкивалось с проблемой переноса навыков в реальный мир из-за несоответствия между смоделированными и фактическими условиями. Tacmap решает эту проблему, обеспечивая высокую степень корреляции между смоделированными и реальными силами контакта. Это позволяет роботам, обученным в симуляции, успешно адаптироваться к неопределенным условиям и взаимодействовать с разнообразными объектами в реальном времени. Благодаря этому, появляется возможность разрабатывать робототехнические системы, способные к автономной работе в сложных и динамичных средах, требующих высокой точности и надежности.
Точное моделирование тактильной обратной связи открывает новые возможности для роботов в обращении с разнообразными объектами и адаптации к непредсказуемым условиям. Благодаря реалистичной симуляции осязания, роботы способны более эффективно распознавать форму, текстуру и жесткость предметов, что позволяет им надежно захватывать и манипулировать ими, даже если эти объекты отличаются по своим характеристикам или находятся в неидеальном состоянии. Эта способность особенно важна в сложных, динамичных средах, где роботам необходимо реагировать на неожиданные препятствия, изменять стратегию захвата в реальном времени и поддерживать стабильность при взаимодействии с окружающим миром. Развитие технологий, имитирующих тактильные ощущения, значительно расширяет сферу применения роботов, позволяя им успешно функционировать в областях, требующих высокой точности, деликатности и адаптивности.
Для повышения реалистичности и скорости работы симуляций тактильного взаимодействия разрабатываются специализированные методы, такие как `TACTO`, `Taxim` и `TacSL`. `TACTO` фокусируется на оптимизации представления контактных сил, обеспечивая более точное моделирование деформаций и давления. `Taxim` предлагает эффективные алгоритмы для вычисления тактильных ощущений в сложных сценах, снижая вычислительную нагрузку. В свою очередь, `TacSL` использует методы машинного обучения для повышения точности симуляции тактильных ощущений при минимальных затратах ресурсов. Совместное применение этих подходов позволяет создавать более достоверные и эффективные симуляции, необходимые для обучения и управления роботами в реальных условиях, а также для разработки новых алгоритмов манипулирования объектами.
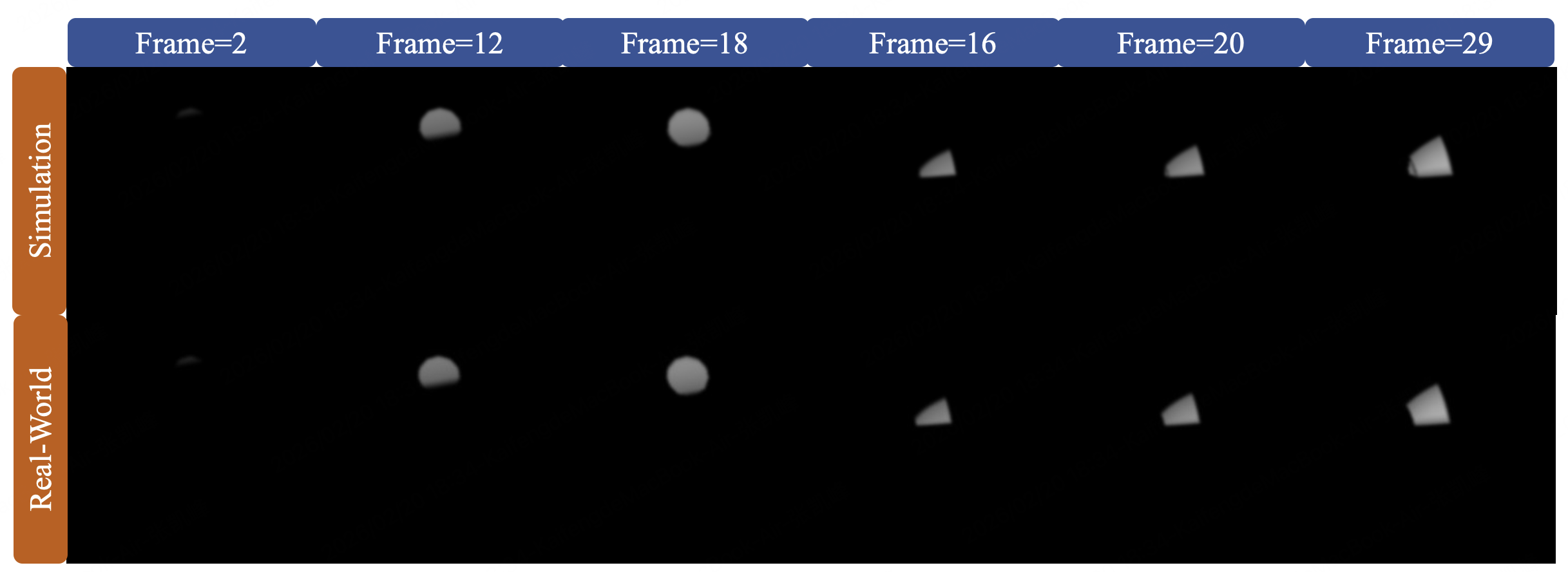
Исследования демонстрируют, что Tacmap достигает высокой корреляции между смоделированными и реальными силами контакта, что свидетельствует о точности используемой геометрической модели проникновения и её способности адекватно отражать базовые принципы контактной механики. Важно отметить, что при увеличении количества взаимодействующих объектов в симуляции, потребление памяти графического процессора (GPU) растет практически линейно, что обеспечивает масштабируемость и эффективность вычислений даже в сложных сценариях. Это позволяет создавать более реалистичные и надежные симуляции для обучения роботов манипулированию различными объектами и адаптации к неопределенным условиям окружающей среды, что является ключевым шагом на пути к созданию действительно robust и адаптивных робототехнических систем.

Представленная работа демонстрирует стремление к редукции сложности в области тактильного восприятия роботов. Использование единого геометрического представления — карт деформаций — позволяет преодолеть разрыв между симуляцией и реальным миром, что является ключевым для надежной передачи навыков манипулирования. Как отмечал Марвин Минский: «Лучшие вещи в жизни — это те, которые не нужно объяснять». В данном контексте, простота и ясность представления данных о тактильном контакте, воплощенная в Tacmap, является свидетельством глубокого понимания принципов роботизированного манипулирования и стремления к элегантности в инженерных решениях. Фокус на геометрической согласованности карт деформаций подчеркивает важность фундаментальных принципов для достижения практических результатов.
Что дальше?
Представленная работа, безусловно, упрощает задачу переноса тактильных симуляций в реальный мир, используя элегантное представление в виде карт глубины проникновения. Однако, не стоит обольщаться кажущейся простотой. Избыточность существующих систем тактильного восприятия остается проблемой. Попытки воссоздать всю сложность реального контакта, вероятно, тщетны. Более продуктивным путем представляется фокусировка на минимальном наборе параметров, действительно необходимых для надежной манипуляции — на той информации, без которой робот просто не может успешно выполнить задачу.
Очевидным ограничением остается зависимость от точности геометрического моделирования. Любая неточность, любая излишняя деталь в модели, в конечном итоге, станет источником ошибки. Будущие исследования должны быть направлены на разработку методов, позволяющих работать с неполными или приблизительными моделями, а также на автоматическое выявление и отбрасывание несущественной информации. Стремление к совершенству в моделировании — это лишь иллюзия контроля.
И, наконец, не стоит забывать, что тактильное восприятие — это не только информация о глубине проникновения. Это еще и текстура, температура, вибрация — целый спектр ощущений. Попытки воссоздать все эти ощущения в симуляции, вероятно, обречены на неудачу. Более разумным подходом представляется использование мультисенсорного подхода, в котором тактильные данные дополняются информацией от других сенсоров, позволяя роботу формировать более полное представление об окружающем мире. И в этом, возможно, кроется истинный путь к надежному и гибкому манипулированию.
Оригинал статьи: https://arxiv.org/pdf/2602.21625.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Lenovo Legion Y70 (2026) ОБЗОР: скоростная зарядка, чёткое изображение, много памяти
- Лучшие смартфоны. Что купить в июне 2026.
- vivo iQOO 15T ОБЗОР: огромный накопитель, яркий экран, плавный интерфейс
- Motorola Moto G47 ОБЗОР: удобный сенсор отпечатков, плавный интерфейс, большой аккумулятор
- Что купить фотографу. Рекомендации
- Honor Magic8 RSR Porsche Design ОБЗОР: замедленная съёмка видео, беспроводная зарядка, чёткое изображение
- Honor Play 80 Pro ОБЗОР: плавный интерфейс, большой аккумулятор, удобный сенсор отпечатков
- Realme 16T ОБЗОР: удобный сенсор отпечатков, плавный интерфейс, высокая автономность
- Oppo K14 Turbo Pro ОБЗОР: скоростная зарядка, объёмный накопитель, большой аккумулятор
- Российский рынок: консолидация, рубль и секторные тренды – анализ ключевых событий недели (04.06.2026 11:32)
2026-02-26 13:56