Тактильное зрение роботов: преодолеваем разрыв между симуляцией и реальностью
Новая методика позволяет роботам лучше воспринимать тактильные ощущения, приближая их к человеческому опыту и повышая точность манипуляций.
Новая методика позволяет роботам лучше воспринимать тактильные ощущения, приближая их к человеческому опыту и повышая точность манипуляций.

Исследователи представили инновационную систему, объединяющую визуальное восприятие и контроль усилий для точного и надежного управления в задачах, требующих тесного контакта с объектами.
![В рамках разработанной системы LessMimic, политика управления гуманоидным роботом формируется на основе команды траектории, проприоцептивных данных и унифицированного представления взаимодействия, основанного на DF, которое учитывает текущие пространственно-временные отношения робота и объекта; это представление конструируется из данных MoCap или изображений глубины и кодируется в компактный латентный вектор [latex] z_{t} [/latex] посредством VAE, после чего политика обучается в два этапа - предварительное обучение навыкам взаимодействия и дискриминационное пост-обучение - и выдаёт команды для полнотелого контроллера.](https://arxiv.org/html/2602.21723v1/x4.png)
Исследователи представили LessMimic — систему, позволяющую гуманоидным роботам осваивать сложные навыки взаимодействия с окружающим миром на протяжении длительных периодов времени.
Исследователи разработали систему, позволяющую врачам дистанционно направлять движения пациентов с помощью тактильной обратной связи и роботизированных экзоскелетов.

В статье представлена концепция ‘Симметричной реальности’ как принципиально нового подхода к взаимодействию человека и искусственного интеллекта.
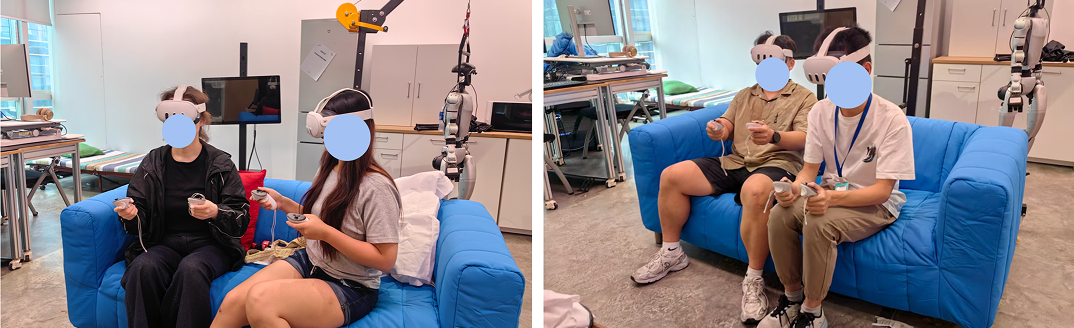
Новая VR-инсталляция позволяет пользователям ощутить себя на месте одинокого кита, использующего уникальную частоту для коммуникации, и исследовать границы понимания и эмпатии.
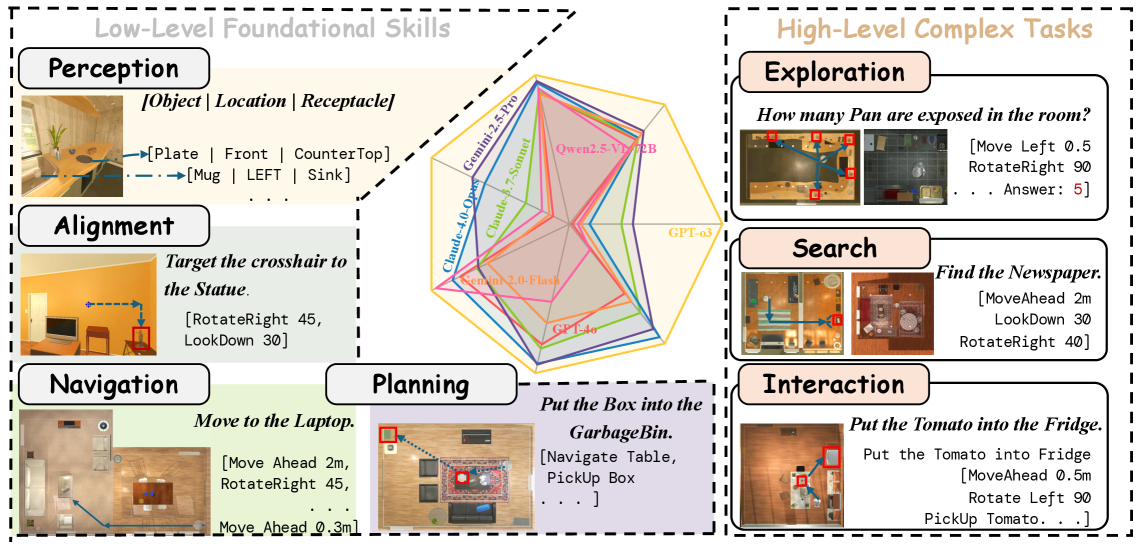
Новое исследование выявляет слабые места современных моделей, управляющих виртуальными агентами, в освоении базовых навыков взаимодействия с окружающим миром.
Новая схема квантового распределения ключей обеспечивает беспрецедентный уровень безопасности, нейтрализуя любые атаки на измерительное оборудование.

Исследование показывает, как использование систем генеративного искусственного интеллекта влияет на процесс поиска информации и обучения у студентов, предлагая новый подход к интерактивному образованию.
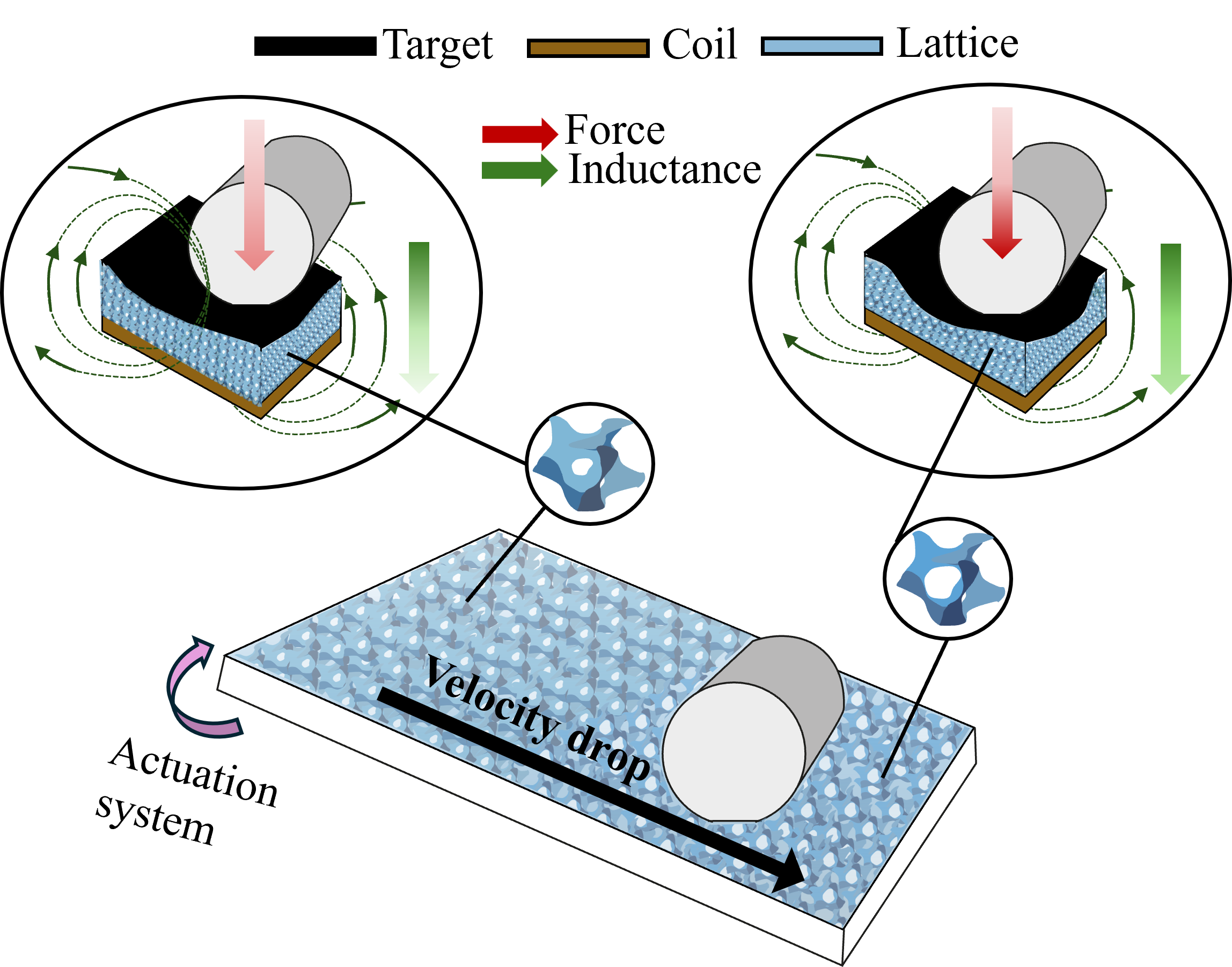
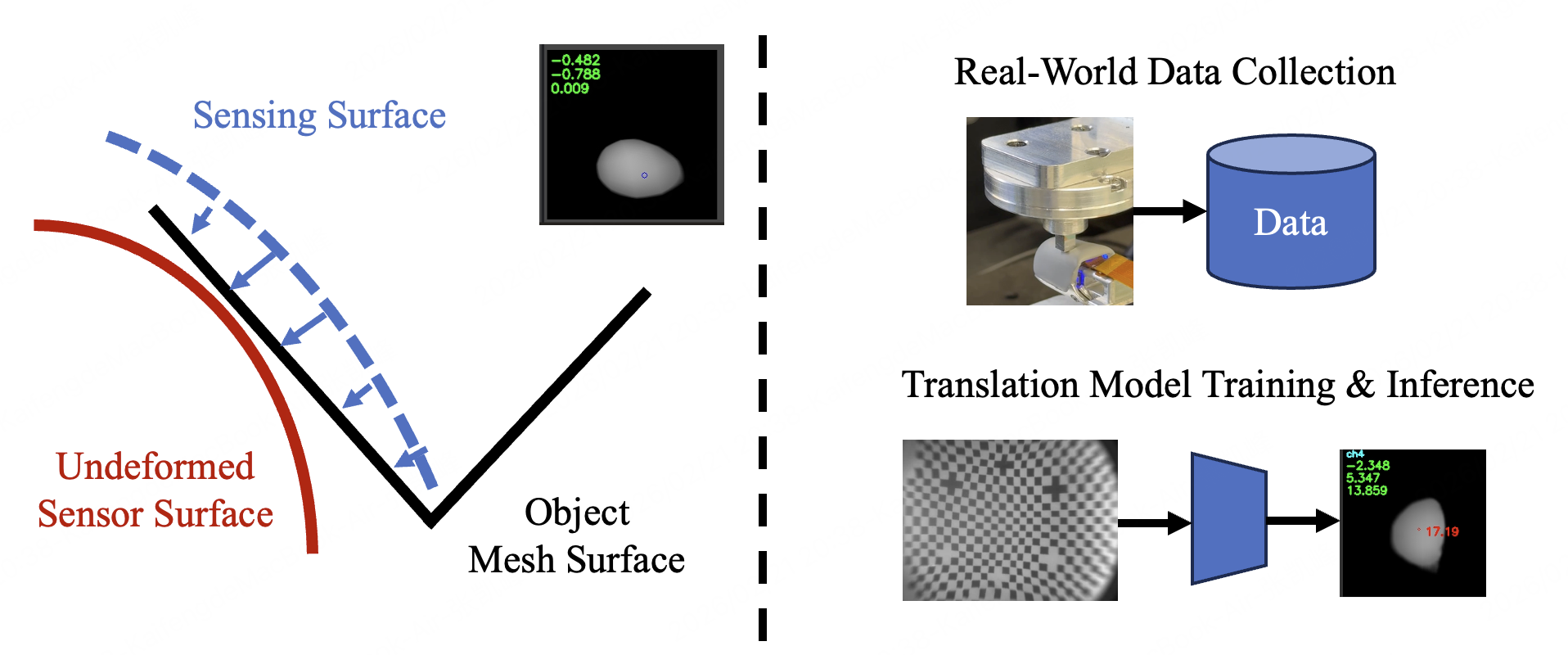
Новая технология позволяет создавать гибкие сенсорные поверхности, способные адаптироваться к форме объектов и обеспечивать деликатное управление ими.