Орбитальный момент на границе: новые возможности для управления металлами
![Наблюдения показывают, что орбитальный крутящий момент, вызванный инъекциями состояний [latex]|L_z\rangle|L_{z}\rangle[/latex] и [latex]|L_x\rangle|L_{x}\rangle[/latex], зависит от координаты <i>zz</i> и модулируется величиной кристаллического поля <i>rr</i>, что согласуется с результатами, представленными на рисунке 1.](https://arxiv.org/html/2602.17220v1/x4.png)
Исследование раскрывает, как орбитальные моменты электронов на границе металлов могут быть использованы для создания механических сил и новых типов устройств.
Исследование раскрывает, как орбитальные моменты электронов на границе металлов могут быть использованы для создания механических сил и новых типов устройств.
Новое исследование сравнивает восприятие насилия людьми и продвинутыми языковыми моделями, выявляя неожиданные расхождения в оценке сложных и неоднозначных ситуаций.
![Архитектура CORAL формирует скрытое пространство [latex]\mathbf{z}_t[/latex] путём горизонтального объединения скрытых представлений одежды [latex]\mathbf{z}_{\text{g},t}[/latex] и человека [latex]\mathbf{z}_{\text{p},t}[/latex], после чего к ним присоединяются каналы с информацией об условиях - холсте [latex]\mathbf{z}_{\text{diptych}}[/latex] и маске [latex]\mathbf{m}_{\text{diptych}}[/latex], а поза вводится в виде токенов с использованием RoPE для согласования пространственных позиций; оптимизация [latex]\mathcal{L}_{\text{CORAL}}[/latex] достигается за счёт минимизации стоимости соответствия одежды и человека [latex]A^{t,l}_{\mathcal{P}\rightarrow\mathcal{G}}[/latex], оцениваемой посредством MM-Attention в блоках DiT, где [latex]\mathcal{L}_{\text{corr}}[/latex] выравнивает эту стоимость с псевдо-основой, полученной из DINOv3, а [latex]\mathcal{L}_{\text{ent}}[/latex] стимулирует более чёткие и локализованные соответствия.](https://arxiv.org/html/2602.17636v1/x4.png)
Исследователи предлагают инновационный подход к виртуальной примерке одежды, позволяющий добиться более реалистичных и точных результатов.
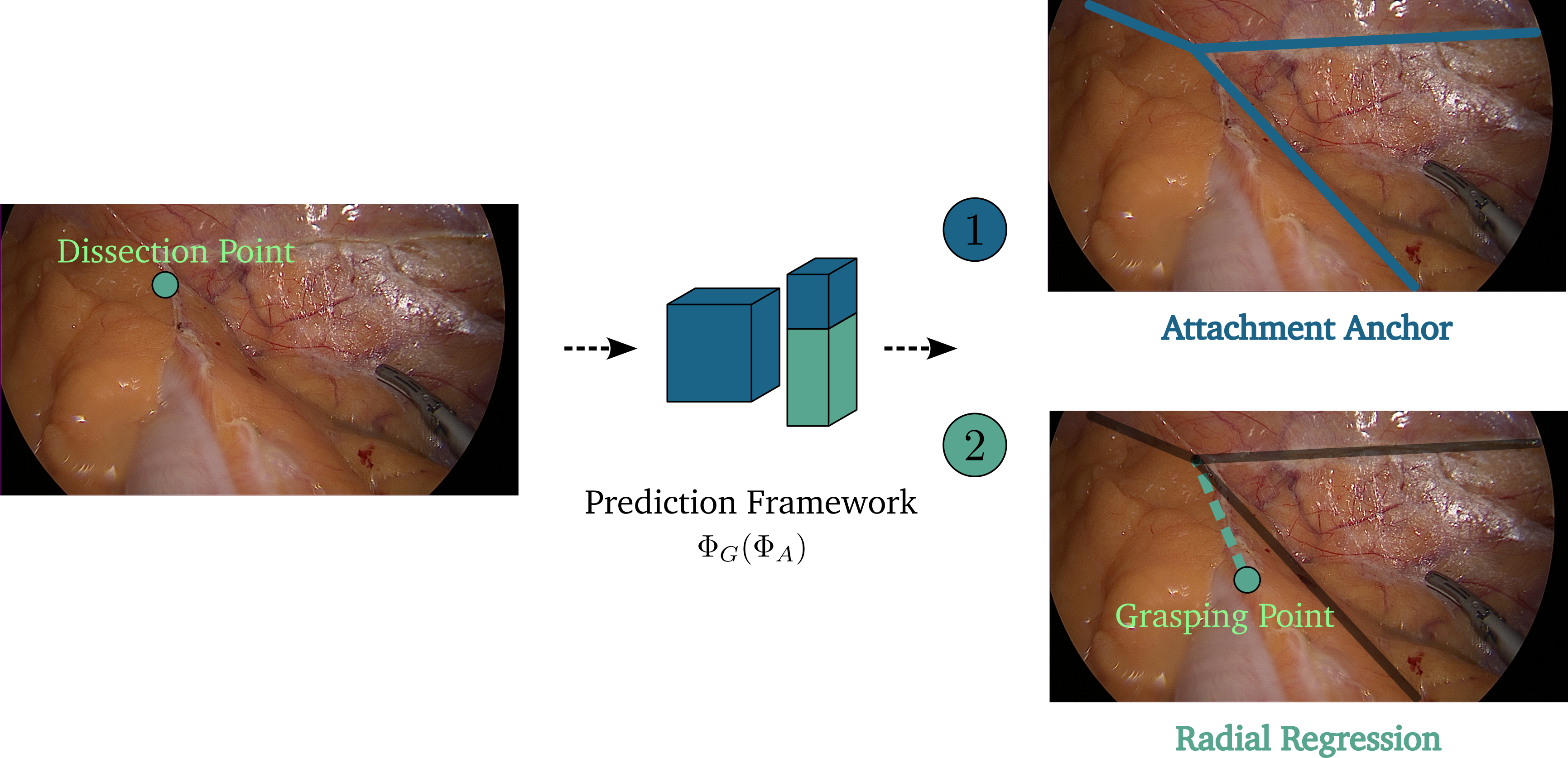
Исследователи предлагают инновационный метод, повышающий точность и надежность предсказания оптимальных точек захвата тканей при роботизированных операциях.
Новый подход к поиску изображений использует формальную верификацию и «визуальные рутины», чтобы обеспечить более надежные и понятные результаты.
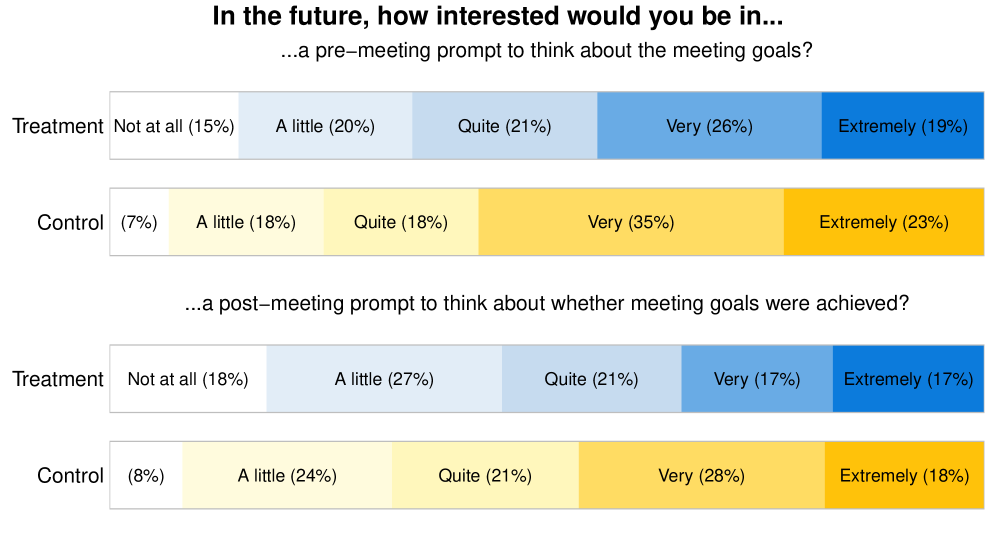
Новое исследование показывает, что простая практика рефлексии после совещаний не всегда повышает их эффективность, но открывает новые возможности для улучшения рабочих процессов.
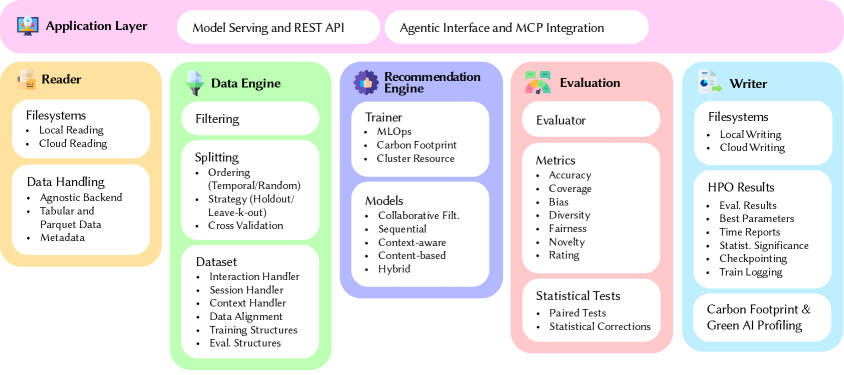
Новая платформа WarpRec объединяет передовые научные разработки и требования индустрии для создания эффективных, надежных и экологичных систем рекомендаций.
Новое исследование показывает, как цифровые границы и системы идентификации влияют на безопасность и благополучие людей, ищущих убежище в Великобритании.
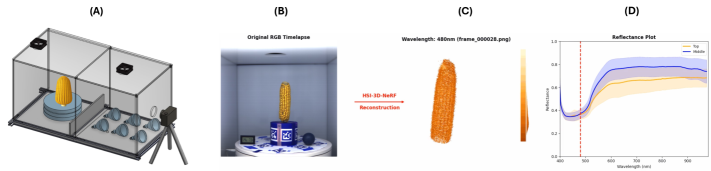
Новый подход позволяет создавать трехмерные модели и анализировать спектральные характеристики объектов, используя статические гиперспектральные изображения и нейронные поля излучения.
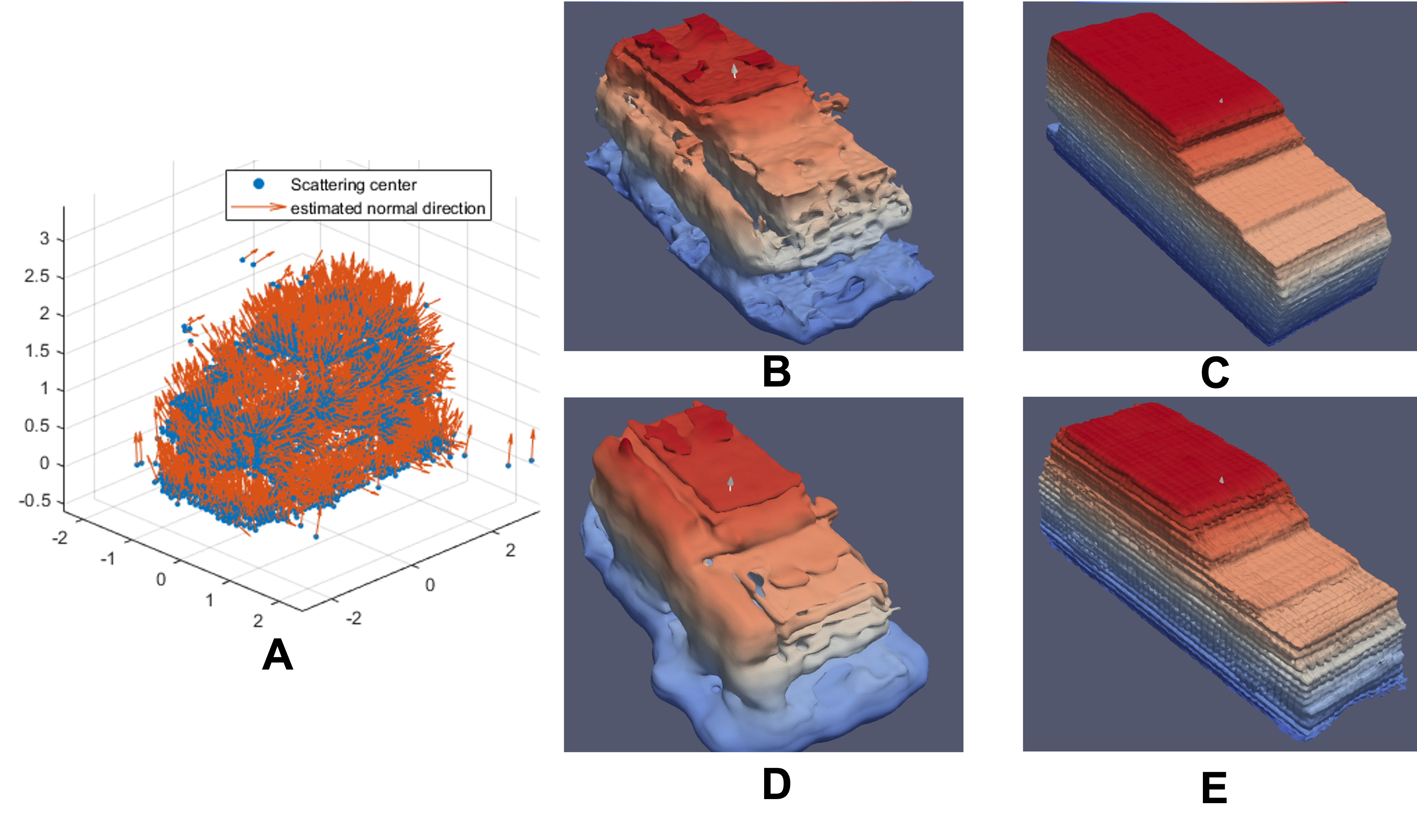
Исследователи предлагают метод восстановления и повышения четкости трехмерных моделей объектов по данным синтетической апертуры радара (SAR) с использованием нейронных неявных представлений.