Осязание в цифре: новый эталон для сжатия тактильных данных
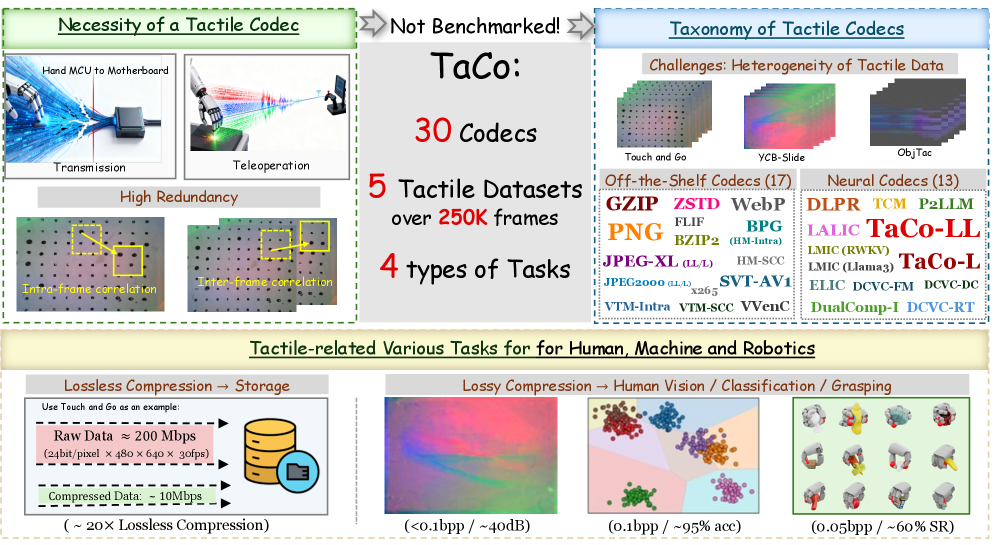
Исследователи представляют TaCo — комплексный набор данных и алгоритмы сжатия, открывающие новые возможности для обработки и передачи информации от тактильных сенсоров.
Исследователи представляют TaCo — комплексный набор данных и алгоритмы сжатия, открывающие новые возможности для обработки и передачи информации от тактильных сенсоров.
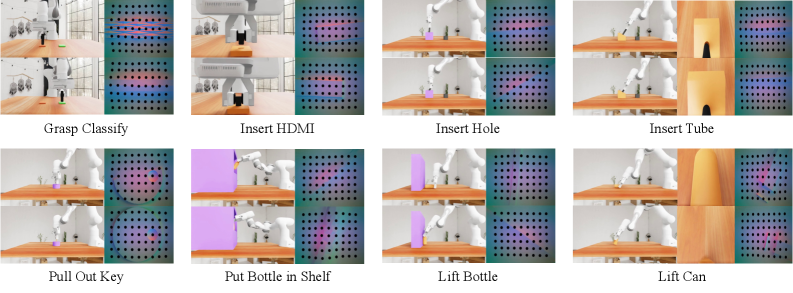
Новая платформа UniVTAC позволяет создавать и обучать роботов, способных к сложным манипуляциям, используя данные о зрении и осязании.
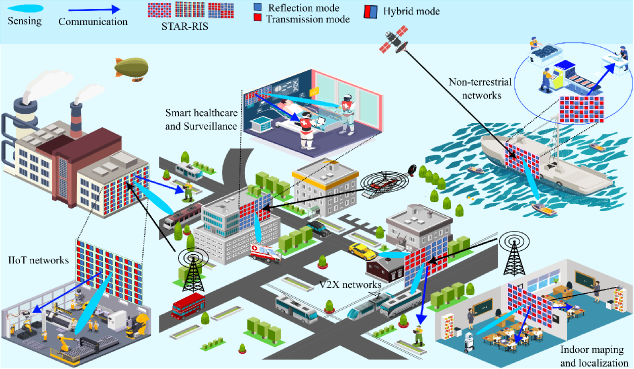
Обзор посвящен перспективному направлению, объединяющему возможности реконфигурируемых интеллектуальных поверхностей (STAR-RIS) для одновременной передачи данных и сбора информации об окружающей среде.
Исследователи представили масштабный набор данных и фреймворк, позволяющие роботам «чувствовать» объекты и прогнозировать динамику сил при взаимодействии с ними.

Исследователи представили гибкую систему на основе Python для создания нейроинтерфейсов, позволяющую в реальном времени анализировать сигналы мозга и управлять внешними устройствами.
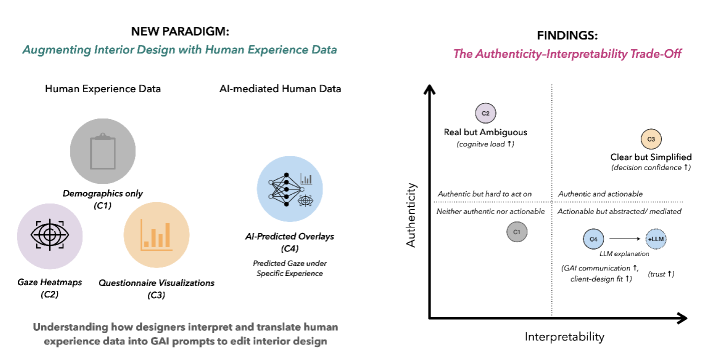
Новое исследование показывает, как дизайнеры могут эффективно использовать данные об опыте пользователей в генеративных AI-инструментах для создания более персонализированных и удобных интерьеров.
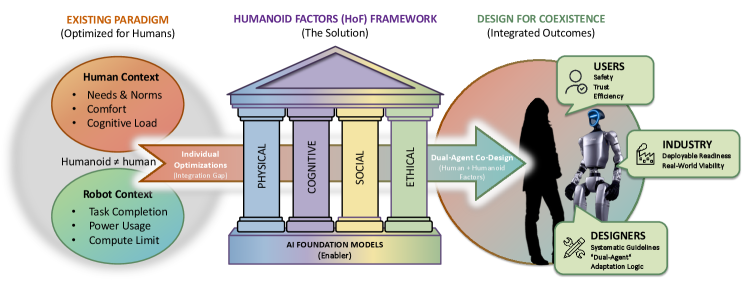
В статье представлена концепция ‘Гуманоидных Факторов’, определяющая принципы проектирования искусственных роботов, ориентированных на безопасное, предсказуемое и этичное сосуществование с человеком.

Новый систематический обзор рассматривает возможности искусственного интеллекта в качестве инструмента для творческого решения задач, выходящего за рамки простого ввода-вывода.
Новая разработка позволяет бимануальным роботам быстро адаптироваться к манипулированию ранее невиданными 3D-объектами, используя перенос знаний и минимальное количество примеров.
Статья исследует, как наши представления об инопланетной жизни неизбежно ограничены земным опытом и когнитивными способностями человека.