Нейроморфное управление: от восприятия к действию
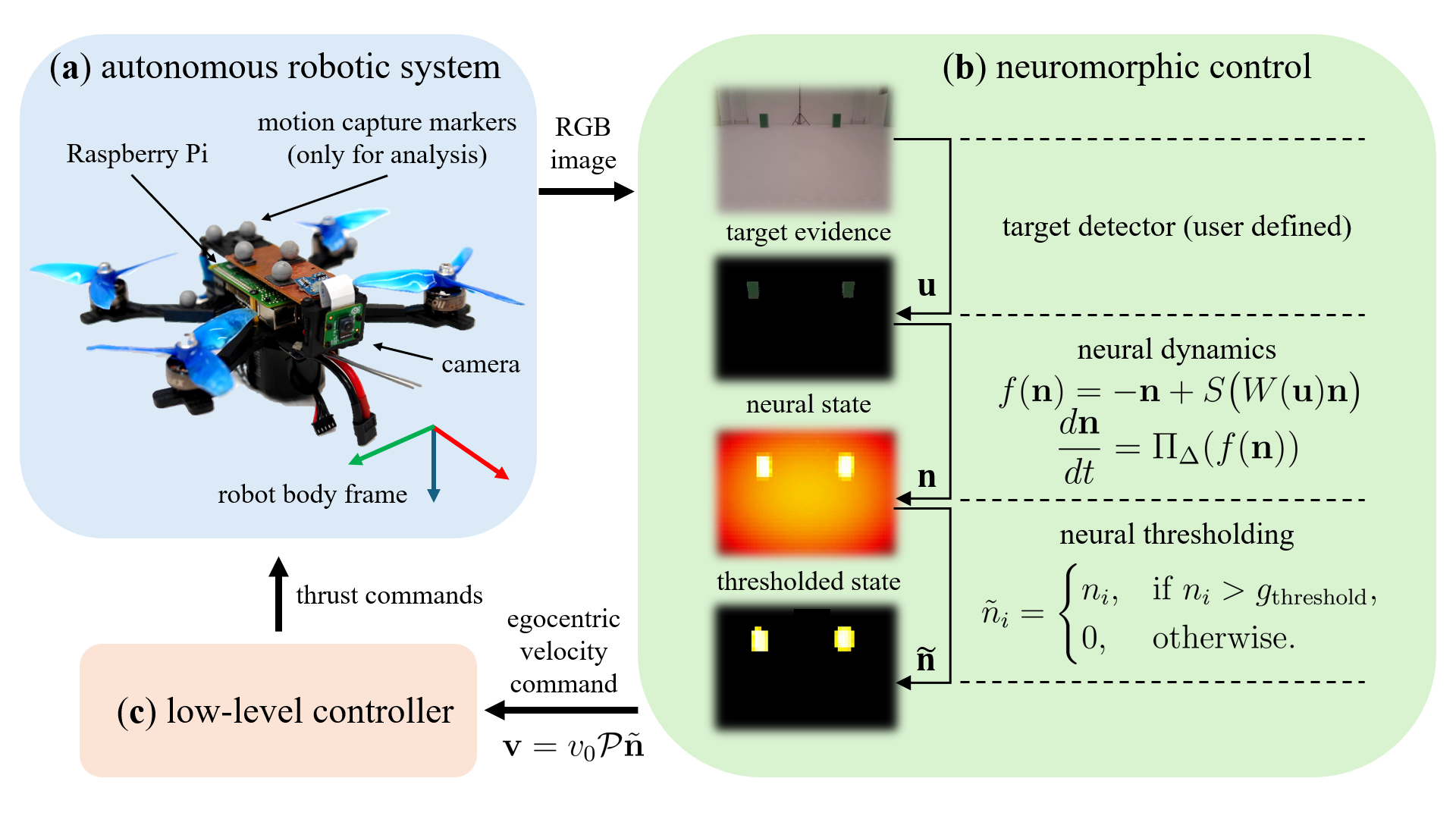
Новый подход к управлению роботами объединяет реактивные и рациональные стратегии, позволяя достичь надежной и интерпретируемой автономной навигации.
Новый подход к управлению роботами объединяет реактивные и рациональные стратегии, позволяя достичь надежной и интерпретируемой автономной навигации.
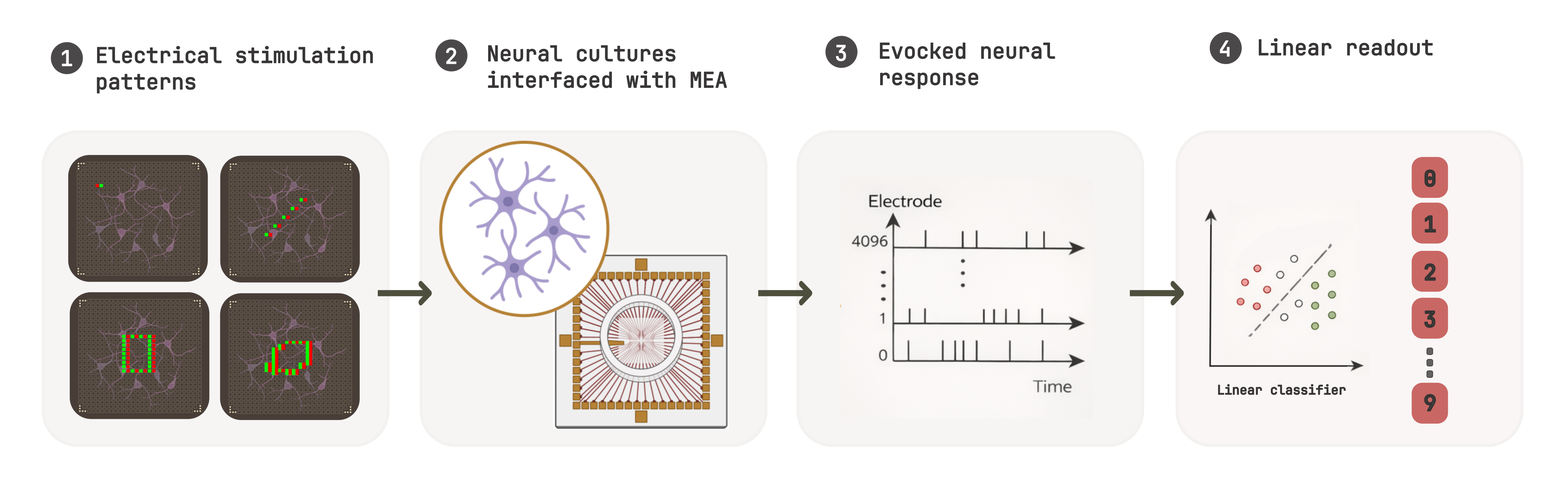
Исследование демонстрирует принципиально новый подход к распознаванию визуальных паттернов, вдохновленный работой биологических нейронных сетей и реализованный на основе резервуарного вычисления.
![Визуально-тактильная модель мира прогнозирует траектории движения, согласующиеся с заданными командами вдоль основных осей координат ([latex] \pm x, \pm y, \pm z [/latex]) и для команд открытия/закрытия захвата, демонстрируя способность к предсказанию динамики взаимодействия с окружением.](https://arxiv.org/html/2602.06001v1/x9.png)
Новое исследование объединяет зрение и осязание, позволяя роботам лучше понимать и взаимодействовать с окружающим миром.
![Единая модель InterPrior, обученная на наборе данных OMOMO[28], демонстрирует способность к обобщению на ранее не встречавшиеся объекты и взаимодействия из наборов данных BEHAVE[3] и HODome[96], подтверждая её потенциал в задачах переноса обучения.](https://arxiv.org/html/2602.06035v1/x3.png)
Исследователи разработали систему, позволяющую создавать более естественные и универсальные взаимодействия человека с окружающими предметами в виртуальной среде.
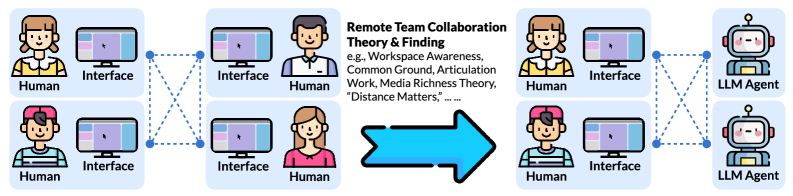
В статье предлагается концепция взаимодействия с большими языковыми моделями как с удаленными коллегами, что открывает новые перспективы для эффективного сотрудничества.
![Обогащение признаками само по себе не объясняет производительность кодирования больших языковых и речевых моделей; наблюдается, что увеличение размерности внешнего пространства признаков [latex]IdI\_{d}[/latex] не всегда коррелирует с улучшением производительности кодирования, усредненной по данным fMRI, что указывает на более сложные факторы, определяющие эффективность этих моделей.](https://arxiv.org/html/2602.04081v1/x6.png)
Новое исследование показывает, что способность языковых моделей к семантической абстракции тесно связана с тем, как они отражают активность человеческого мозга.

Новый подход позволяет моделям лучше понимать изображения, динамически выбирая оптимальные слои для анализа в зависимости от сложности запроса.
Новая система использует отраженный видимый свет и нейронные сети для определения местоположения человека в комнате без необходимости использования каких-либо носимых или мобильных устройств.

Новый подход позволяет воссоздавать реалистичные 3D-модели взаимодействия рук с предметами, используя возможности искусственного интеллекта и компьютерного зрения.
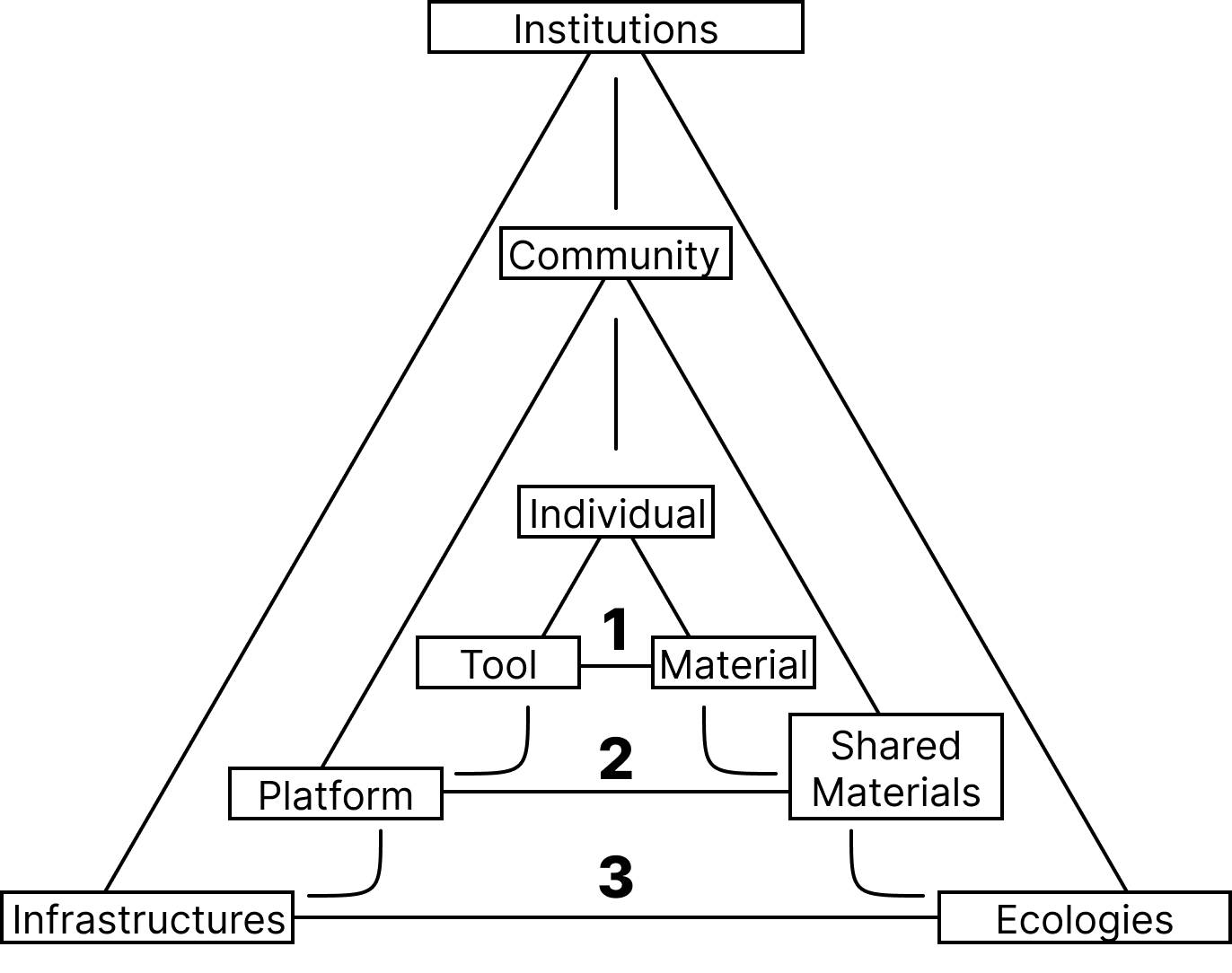
В статье рассматривается возможность создания цифровых инструментов для работы с материалами, которые поддерживают диалог между человеком, технологией и окружающей средой.