Автор: Денис Аветисян
Исследователи продемонстрировали универсальный интерфейс, позволяющий управлять дронами с помощью больших языковых моделей, открывая перспективы для сложных и полностью автономных миссий.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
В статье представлен подход, использующий протокол Model Context Protocol (MCP) для обеспечения взаимодействия больших языковых моделей с дронами и управления ими посредством Mavlink.
Несмотря на растущий потенциал искусственного интеллекта в управлении беспилотными летательными аппаратами, интеграция больших языковых моделей (LLM) с системами управления дронами остаётся сложной задачей, требующей значительных усилий по адаптации. В статье ‘A Universal Large Language Model — Drone Command and Control Interface’ представлен универсальный интерфейс, основанный на новом протоколе контекста модели (MCP), позволяющий LLM управлять дронами, использующими протокол Mavlink. Разработанная система обеспечивает автономное управление дроном как в реальных, так и в симулированных условиях, используя актуальные данные с карт Google. Не откроет ли это путь к созданию сложных, полностью автономных миссий с использованием дронов, управляемых естественным языком?
Преодолевая ограничения: БЯМ и управление дронами
Традиционные методы управления дронами, основанные на заранее запрограммированных алгоритмах или непосредственном вмешательстве человека, зачастую демонстрируют ограниченную гибкость и неспособность к самостоятельной адаптации к изменяющимся условиям окружающей среды. В большинстве случаев, дрон выполняет лишь те действия, которые были четко определены разработчиком, или требует постоянного контроля со стороны оператора. Такой подход существенно ограничивает возможности применения дронов в динамичных и непредсказуемых ситуациях, таких как поисково-спасательные операции, инспекция инфраструктуры в труднодоступных местах или автономная доставка грузов. Отсутствие истинной автономии требует значительных ресурсов для постоянного мониторинга и управления, снижая эффективность и увеличивая риски, связанные с человеческим фактором.
Перспективным направлением в управлении беспилотными летательными аппаратами становится использование больших языковых моделей (БЯМ). Вместо традиционных методов, основанных на заранее запрограммированных алгоритмах или непосредственном ручном управлении, БЯМ открывают возможность взаимодействия с дроном посредством естественного языка. Однако, для реализации этой концепции необходима надёжная и эффективная коммуникационная инфраструктура. Она должна обеспечивать не только передачу команд, но и корректную интерпретацию намерений оператора, учитывая контекст и возможные неоднозначности. Разработка такой системы требует преодоления технических сложностей, связанных с обработкой естественной речи, а также интеграцией БЯМ с низкоуровневыми системами управления дроном, чтобы обеспечить точное и безопасное выполнение команд.
Основная сложность в создании систем управления дронами на базе больших языковых моделей (LLM) заключается в бесшовной интеграции этих моделей с системами низкоуровневого управления, преобразуя высокоуровневые команды в конкретные маневры. Для эффективной работы с моделями с открытым исходным кодом, такими как qwen2.5-7b-instruct, необходим значительный размер контекстного окна — до 32 тысяч токенов. Это обусловлено потребностью в обработке сложных инструкций, поддержании истории взаимодействия и обеспечении понимания контекста окружающей среды, что критически важно для адаптации дрона к меняющимся условиям и выполнения задач с высокой точностью. Именно достаточный размер контекстного окна позволяет LLM корректно интерпретировать неоднозначные команды и избегать ошибок при принятии решений, обеспечивая надежное и автономное управление летательным аппаратом.
Протокол контекста модели (MCP): Унифицированный интерфейс для БЯМ и дронов
Протокол контекста модели (MCP) представляет собой стандартизированную коммуникационную структуру, разработанную для обеспечения взаимодействия больших языковых моделей (LLM) с внешними инструментами, в частности, беспилотными летательными аппаратами (БПЛА). MCP обеспечивает унифицированный интерфейс для обмена информацией между LLM и системой управления дроном, позволяя LLM запрашивать выполнение конкретных действий и получать обратную связь о их выполнении. Стандартизация достигается за счет определения четкого формата запросов и ответов, что упрощает интеграцию различных LLM и БПЛА в единую систему управления. Это позволяет создавать более сложные и автоматизированные сценарии использования дронов, управляемые естественным языком.
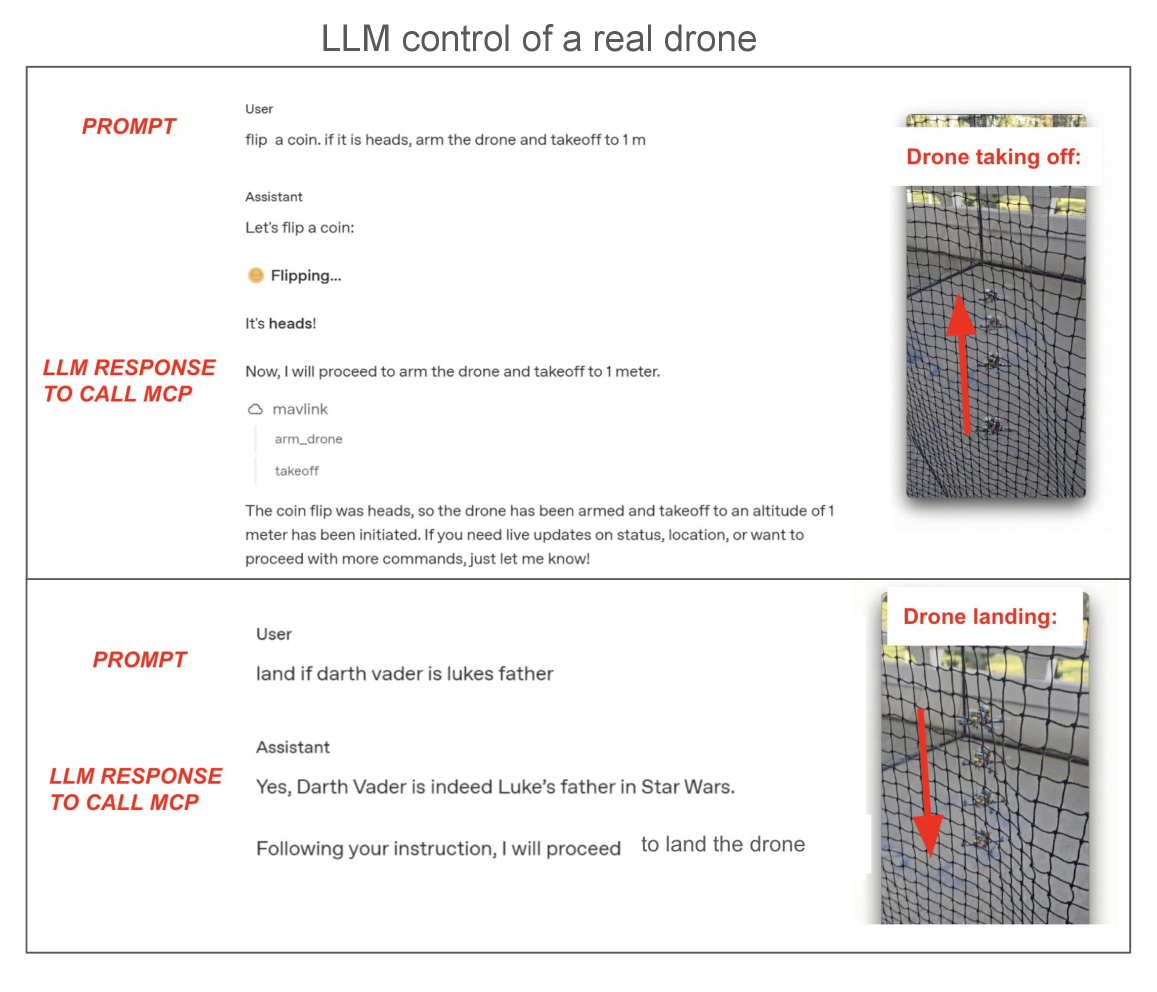
Протокол Model Context Protocol (MCP) позволяет большим языковым моделям (LLM) понимать и использовать вызовы функций для управления внешними устройствами, в частности, дронами. LLM, используя MCP, формирует запрос на выполнение определенного действия, который интерпретируется системой управления дроном. Это достигается путем сопоставления запроса LLM с конкретной функцией, доступной в системе управления дроном, что позволяет LLM инициировать такие действия, как взлет, посадка, перемещение в заданную точку или выполнение других команд. Фактически, LLM выступает в роли пользователя, выдающего инструкции через стандартизированный интерфейс, а система управления дроном выполняет эти инструкции.
Для обеспечения взаимодействия между LLM и системой управления дроном используется DroneServer, который транслирует запросы протокола MCP в команды протокола Mavlink — стандартный язык управления дронами. В качестве инструментов для LLM было представлено 45 из 155 доступных методов MavSDK. Определение этих инструментов и их функциональности потребовало около 5000 токенов в контекстном окне LLM, что является значительным объемом, но необходимым для обеспечения достаточного уровня контроля над функциональностью дрона.

Валидация MCP: Тестирование с разнообразными БЯМ и инструментами
В нашу систему управления дронами на основе MCP успешно интегрированы следующие ведущие большие языковые модели (LLM): Anthropic Claude, OpenAI GPT-4, Google Gemini, Llama 3 и Qwen 2.5. Интеграция позволила использовать возможности этих LLM для обработки и интерпретации команд управления, а также для анализа данных, получаемых от датчиков дрона. Все модели прошли проверку на совместимость с существующей архитектурой системы и продемонстрировали способность эффективно взаимодействовать с компонентами управления дроном.
Система валидации была протестирована в двух режимах: с использованием программно-аппаратной симуляции (SITL) и на реальном аппаратном обеспечении. SITL-окружение позволило провести обширное тестирование различных сценариев и алгоритмов управления в контролируемых условиях, выявляя потенциальные ошибки и оптимизируя производительность. Дополнительное тестирование на физическом дроне подтвердило работоспособность системы в реальных условиях эксплуатации, обеспечивая её надёжность и устойчивость к внешним факторам. Совместное использование симуляции и аппаратного тестирования позволило всесторонне проверить систему и подтвердить её готовность к развёртыванию.
Для упрощения процесса разработки и валидации системы управления дронами на основе больших языковых моделей (LLM) использовались инструменты LM Studio и MavSDK. LM Studio обеспечила возможность локального тестирования LLM с открытым исходным кодом, что позволило оперативно проводить итерации и отладку без необходимости подключения к внешним сервисам. MavSDK, в свою очередь, упростила взаимодействие с системами управления дрона, предоставляя унифицированный интерфейс для отправки команд и получения телеметрии, что существенно сократило время, необходимое для интеграции LLM с аппаратной частью и программным обеспечением дрона.

Влияние и перспективы: От экстренных служб до управления роем
Разработанная система демонстрирует значительный потенциал в критически важных ситуациях, таких как тушение пожаров, поисково-спасательные операции и полеты за пределами прямой видимости оператора. В условиях пожара, рой дронов способен оперативно оценить масштабы бедствия, выявлять очаги возгорания и координировать действия наземных служб, значительно повышая эффективность тушения. В поисково-спасательных операциях, система позволяет быстро прочесывать большие территории, обнаруживая пострадавших даже в труднодоступных местах. Возможность осуществления полетов за пределами прямой видимости открывает новые перспективы для мониторинга инфраструктуры, доставки грузов и проведения инспекций в удаленных районах, где традиционные методы становятся неэффективными или опасными. Подобные применения подчеркивают, что данная технология может стать незаменимым инструментом для служб экстренного реагирования и различных отраслей промышленности.
Управление роем дронов становится значительно более эффективным благодаря использованию больших языковых моделей (LLM). Традиционные методы координации требуют сложного программирования и ручного вмешательства, что ограничивает масштабируемость и гибкость. Однако, LLM способны понимать и интерпретировать сложные инструкции на естественном языке, позволяя дронам автономно принимать решения и адаптироваться к меняющимся условиям. Это открывает возможности для выполнения сложных совместных миссий, таких как совместное картографирование больших территорий, скоординированный поиск и спасение в труднодоступных районах, или даже проведение комплексных операций по мониторингу и обслуживанию инфраструктуры. Благодаря LLM, рой дронов способен действовать как единый, интеллектуальный организм, значительно превосходя возможности отдельных аппаратов.
Интеграция системы с картографическими сервисами, такими как Google Maps, значительно расширяет возможности ориентации и ситуационной осведомленности. Благодаря этому, беспилотные аппараты способны не только точно определять свое местоположение в реальном времени, но и эффективно планировать маршруты, обходя препятствия и учитывая динамически меняющиеся условия окружающей среды. Такое сочетание позволяет дронам действовать автономно даже в сложных городских ландшафтах или труднопроходимой местности, что критически важно для операций поиска и спасения, мониторинга инфраструктуры и доставки грузов. Возможность наложения данных с карт на изображение с камер дронов обеспечивает операторам или автоматическим системам управления полную картину происходящего, что повышает эффективность и безопасность выполнения задач.

Исследование демонстрирует неизбежность компромиссов в стремлении к полной автономности. Создание универсального интерфейса для управления дронами посредством больших языковых моделей, как представлено в работе, — это не триумф элегантной теории, а скорее признание её границ. Идея Model Context Protocol (MCP) — попытка обуздать хаос взаимодействия, но, как показывает опыт, любое оптимизированное решение рано или поздно столкнётся с необходимостью новой оптимизации. Бертранд Рассел однажды заметил: «Всё, что можно сделать, можно и перестать делать». Это особенно верно в контексте разработки сложных систем — бесконечный цикл улучшения часто приводит к усложнению, которое требует новых упрощений. Данная работа — ещё одно подтверждение этого принципа.
Что дальше?
Представленная работа, несомненно, демонстрирует возможность интеграции больших языковых моделей с управлением дронами через протокол MCP. Однако, за элегантностью архитектуры неизбежно скрываются будущие проблемы. Ведь «универсальный интерфейс» — это, как правило, просто способ отложить решение конкретных проблем совместимости до следующего релиза. Вопрос не в том, возможно ли управлять дроном через LLM, а в том, как обеспечить надёжность и предсказуемость в реальных условиях эксплуатации, где помехи, ограниченные ресурсы и непредсказуемое поведение пользователей — норма.
Очевидно, что протокол MCP становится узким местом. Он хорошо работает в лабораторных условиях, но в масштабируемой системе, где сотни дронов одновременно запрашивают ресурсы, его эффективность потребует пересмотра. Более того, надежность LLM в критически важных приложениях остаётся открытым вопросом. Каждый «революционный» промпт — это потенциальная уязвимость. Каждая новая функция — дополнительный риск.
В конечном итоге, успех подобных систем будет определяться не красотой кода, а способностью к адаптации и ремонту. Если код выглядит идеально — значит, его ещё никто не деплоил. Будущие исследования, вероятно, будут сосредоточены на разработке систем мониторинга, автоматического восстановления и, что самое важное, механизмов отката к более простым, но надёжным решениям. Потому что, как показывает практика, самое сложное — это не создать что-то новое, а поддерживать то, что уже работает.
Оригинал статьи: https://arxiv.org/pdf/2601.15486.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Лучшие смартфоны. Что купить в марте 2026.
- vivo iQOO Z10x ОБЗОР: яркий экран, удобный сенсор отпечатков, объёмный накопитель
- Новые смартфоны. Что купить в марте 2026.
- Нефть и бриллианты лидируют: обзор воскресных торгов на «СПБ Бирже» (08.03.2026 16:32)
- Неважно, на что вы фотографируете!
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- Российский рынок: Нефть, геополитика и лидерство «Сбербанка» (11.03.2026 13:32)
- Infinix Note 60 Ultra ОБЗОР: скоростная зарядка, объёмный накопитель, отличная камера
- Руководство по Stellaris — Полное прохождение на 100%
- Утечка технических характеристик Motorola Razr 50 Ultra / Razr+ 2024
2026-01-26 00:25